一种双CPU自动寻光小车的设计与实现
2018-07-27刘铸刘恒宇凡正波
刘铸,刘恒宇,凡正波
(成都理工大学核技术与自动化工程学院,四川成都,610059)
0 引言
随着无人驾驶的提出,智能小车得到了飞速的发展,自动寻光小车就是其中的一种。传统的光电小车都采用单CPU运行方式,既进行摄像头画面的采集又要进行控制算法的实现。这就存在CPU处理速度不够快的问题,导致摄像头帧率不高。小车高速运行的过程中,无法保证小车能准确的找到信号灯的位置。为了提高摄像头的帧率,本文设计了一种双CPU控制系统,将光线采集和小车控制分离,既能使小车能精准找到信号灯位置,又可以快速稳定的到达既定位置。
1 系统总体设计
自动寻光小车工作原理:利用STM公司M4内核的处理器STM32F407ZGT6进行摄像头画面的采集,计算得到信号灯的位置坐标,通过串口将坐标信息传给M3内核的STM32F103ZET6,F1根据传来的坐标值做出判断。若没有采到信号灯的位置,则旋转车身继续找信号灯位置,若在画面中找到信号灯的位置,利用编码器测量得到两轮的转速,根据特殊的姿态解算和PID运算,使小车快速稳定地运动到信号灯的位置。在车头的位置安装了红外避障模块,在小车的运行过程中遇到障碍物,小车会倒退一小段,防止撞毁小车。同时,为了观测小车的运行状态,在F1上安装了显示屏,用于显示信号灯的位置坐标和小车当前的运行速度。系统总体框图如1所示。

图1 系统总体框图
2 硬件设计
车身采用三轮结构,后面两个轮为主动轮,与驱动相连,利用差速实现小车的转向运行。最前面的轮采用牛眼轮,主要用于小车的支撑,另外由于其结构的优势,可以大的减小小车的转弯半径,使小车转弯更加稳定灵活。
本系统采用模块化设计的方法,大大提升系统的设计效率。
■2.1 摄像头模块
光电小车寻光采用了摄像头模块。摄像头采用带FIFO的ov7670模块,通过SCCB总线控制,可以输出整帧、子采样、取窗口等方式的8位数据,其VGA输出最多可以达到30帧/秒。为了保证摄像头采集的帧率,选用M4内核的处理器STM32F407ZGT6。这款处理器其主频可以达到168M,拥有1M的闪存储器,完全满足对摄像头的控制与数据的读取的要求。
■2.2 控制模块
在控制端选用M3内核处理器STM32F103ZET6。这款F1的处理器主频最大可以达到72M,拥有512K的闪存储器,外设资源丰富,处理速度和内存容量都完全可以适应小车一些常见的控制算法。
■2.3 驱动模块
驱动模块选用A4950。A4950是一款双路全桥DMOS电机驱动芯片。输出的峰值电流最大达到2安培,电压最大可以承受40伏特。通过外部PWM的控制,可以自由地控制直流电机的正反转和加减速。内部还具有过流保护功能,可以防止驱动运行时被轻易烧毁。驱动模块原理图如图2所示。
■2.4 电机模块
电机选用自带编码器的直流减速电机。减速比为30:1,测速精度高,可以进行更高精度的速度控制。扭矩为1kg·cm,工作电压为12V,额电电流为360mA。足够大的扭矩保证小车高速稳定的运行。
■2.5 电源模块

图2 驱动模块原理图
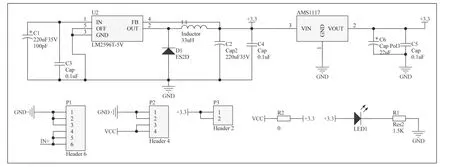
图3 电源模块原理图
电池选用3S航模电池,容量达到2200mA,可以稳定输出12V电压。用AMS1117外搭了稳压电路,12V的电源经过降压,输出稳定的5V电压,用于给单片机供电。电源模块的原理图如图3所示。
■2.6 显示模块
显示模块选用OLED。OLED具有体积小,显示清晰等特点,将他与F1相连,通过F1控制,显示出小车运行的速度和信号灯的坐标。
■2.7 红外避障模块
红外避障模块采用三个E18-D80NK红外接近开关模块。其具有精度高,控制简单,调试方便等特点,最大检测范围可以达到80cm,可以根据具体情况进行调节。三个配合使用,可以有效避免视野的盲区,准确检测到前方的障碍物。
3 软件设计
F4部分:F4将采回来的点颜色值进行二值化,对目标点的横坐标进行平均值滤波,滤波后的点坐标作为最终采回信号灯的位置坐标。最后通过串口将坐标值传给F1。
F1部分:F1读取到坐标值后,进行判断,若信号不在画面里,小车自转继续找光。若光线在画面中,首先进行姿态的结算,根据小车的两轮转速判断小车运动状态。再进行PID算法控制,最终让小车快速稳定的运动到信号灯位置。红外避障采用中断的方式进行处理,在运行过程中,一旦检测到障碍物,就控制电机倒退一小段距离,绕开障碍物后,小车重新找光。
4 结束语
本文设计的双CPU自动寻光小车,较传统的单CPU的小车,保证图像帧率的同时,还可以进行一定的图像处理,确保小车对光线精确地采集。将另一个CPU从图像采集和处理中解放出来,保证小车控制快速性和稳定性的同时,为小车实现更复杂算法的控制提供了条件。可以看出这种双CPU系统的智能小车在开发应用中具有远大的前景。