可穿戴式无线空中鼠标
2018-07-27周涛郝英杰盛庆华
周涛,郝英杰,盛庆华
(杭州电子科技大学,浙江杭州,310018)
0 引言
越来越多的场景需要远程使用鼠标,例如多媒体教学、集体会议、体感游戏、工程应用控制、移动电视盒等。传统的光学鼠标由于二维平面的限制不能够方便的对电脑指针进行远程控制。因此,人们迫切地希望拥有一款摆脱二维平面的束缚、并且能够在三维空间中自由使用的可穿戴式无线空中鼠标。随着微机电系统的快速发展,陀螺仪与加速度传感器的出现促使产生了新一代的空中鼠标[1]。本文提出了一种新型的可穿戴式空中鼠标设计方案,用户可以自由地在三维空间中操控电脑指针。
1 系统原理与总体方案设计
可穿戴式无线空中鼠标的由两个设备组成:主控制无线发射设备和无线USB接受设备。主控制无线发射设备主要由四个模块组成,分别是电源管理模块、STM32核心控制模块、NRF24L01无线通信模块和MPU6050传感器模块。示意图如图1所示。首先MPU6050六轴传感器不断接受用户的手势信息,由STM32微控制处理器利用中断查询的方式接受六轴传感器的数据,经过补偿滤波算法之后,通过NRF24L01通讯芯片将数据发送出去。无线USB接受设备主要由两个模块组成,STM32控制模块与NRF24L01无线通信模块。示意图如图2所示。无线USB接受设备捕获主控制无线发射设备发送的数据,再按照USB2.0协议进行编码,通过USB接口完成和电脑的交互通信。此时完成用户控制电脑指针的全部过程。主控制无线发射设备和无线USB接受设备的电路图如图3,图4所示。

图1 主控制无线发射设备组成框图
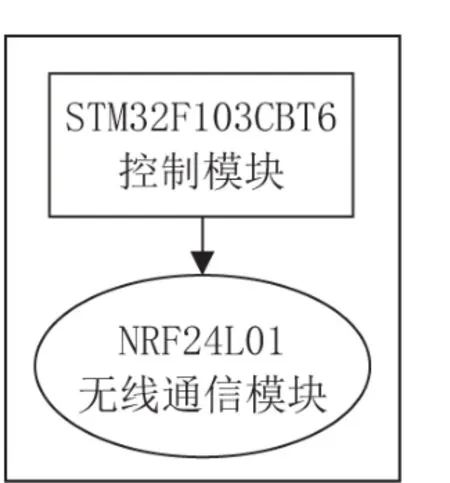
图2 无线USB接受设备

图3 无线USB接受设备的电路图

图4 主控制无线发射设备的电路图
2 系统的硬件设计
■2.1 MPU6050传感器模块
系统的惯性测量单元采用MPU6050六轴传感器作为手势运动的信息采集元件。MPU6050六轴传感器中既有陀螺仪与加速度传感器,更在内部嵌入了数字运动处理器DMP。数字运动处理器可以通过融合算法解出传感器的姿态和四元数,因此使用者不需要额外进行数字运算[2]。由数字运动处理器实现融合算法后,单片机便释放了大量的运算资源。单片机只需要设置好外部中断等待数字运动处理器传送数据即可,这些数据即是用户的手势运动初始的信息。这样以来,单片机有更多的资源与更多的时间来完成补偿滤波算法滤波以及其他控制逻辑。
■2.2 STM32核心控制模块
主控制无线发射设备使用的是STM32F401CCU型号微型控制单元,它拥有168MHz的主频和高达210MIP的整数运算能力。完全符合空中鼠标实时控制的要求,可以有效实现对初始手势数据的实时处理。无线USB接受设备采用小型并且廉价的STM32F103C8T6型号微控制处理器。它接受NRF24L01发送的数据并通过USB协议将处理的数据发送给电脑来是实现对电脑的控制。
■2.3 NRF24L01无线通信模块
NRF24L01是一款新型单片射频收发器件,工作于2.4GHz全球开放ISM频段免许可证使用,最高工作频率2Mbps,高效GFSK调制,抗干扰能力强,适于工业控制场合,126频道,满足多点通信和调频通信需求;内置硬件CRC检错和点对多点通信地址控制。NRF24L01通过SPI通信总线驱动,而STM32F103具备SPI接口,可直接通过其SPI1接口对NRF24L01进行驱动,设置无线收、发模式,实现对监控数据的无线传输。STM32微控制器与NRF24L01的引脚连接关系如表1所示。
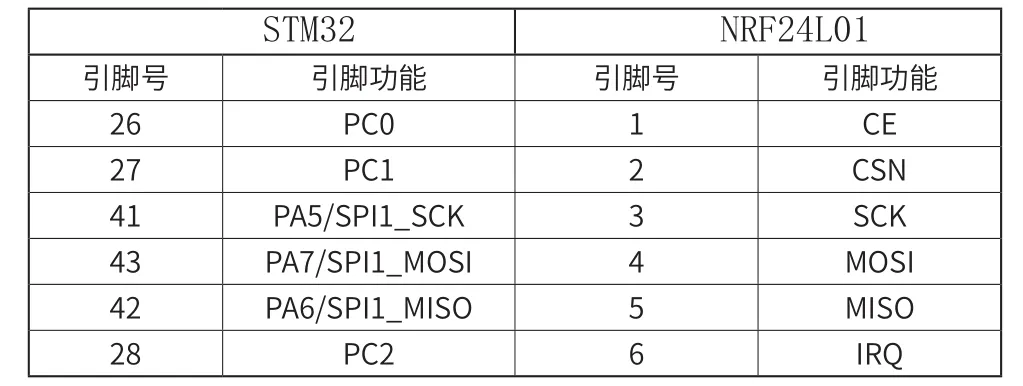
表1 STM32微控制器与NRF24L01的引脚连接关系
■2.4 电源管理模块
电源管理模块是主控制无线发射设备的核心,它直接决定了成品的体积、重量以及用户的使用体验。我们采用XT582728型号的可充电锂电池,它集成了过充保护电路,所以在设计电源电路时无需考虑过充电[2]的情况。电源管理模块由三部分组成,充电电路、降压电路与电源电压采集电路。电源管理模块原理图如图5所示。降压电路利用CAT6219低压差稳压电路,避免使用分立的元器件,包括电感、电容、二极管和MOS管,搭建传统的降压斩波电路。CAT6219的额定电流达到500mA,在负载电流和线电压变化期间提供快速响应时间。具有快速启动特性,可以通过外接旁路电容来降低总输出噪声,同时又不会影响150μs的启动时间。是设计低成本、轻重量设备的良好选择。充电电路使用的是TP4507电源管理芯片。它是一款完整的单节锂离子电池充电器,由于内部采用了PMOSFET架构,加上防倒冲电路,所以不需要外部检测带你路和隔离二极管。因此,小型的SOT封装与较少的外部元件使得TP4507特别适合用于便携式设备。
3 系统的软件设计
本系统软件设计的核心利用STM32完成对MPU6050六轴传感器发送数据的处理。MPU6050六轴传感器包含加速度计与陀螺仪两个期间。加速度计用来检测物体的加速度,但是取瞬时值计算倾角误差比较大,捕获一段时间的数据有助与降低倾角误差;另一方面,陀螺仪在检测物体的方位角信息时是不受物体加速度的影响,但是积分漂移和温度漂移会随着使用时间的增加而增大误差。两个传感器的性质是互补的,我们利用这样的性质设计出了补偿滤波算法。
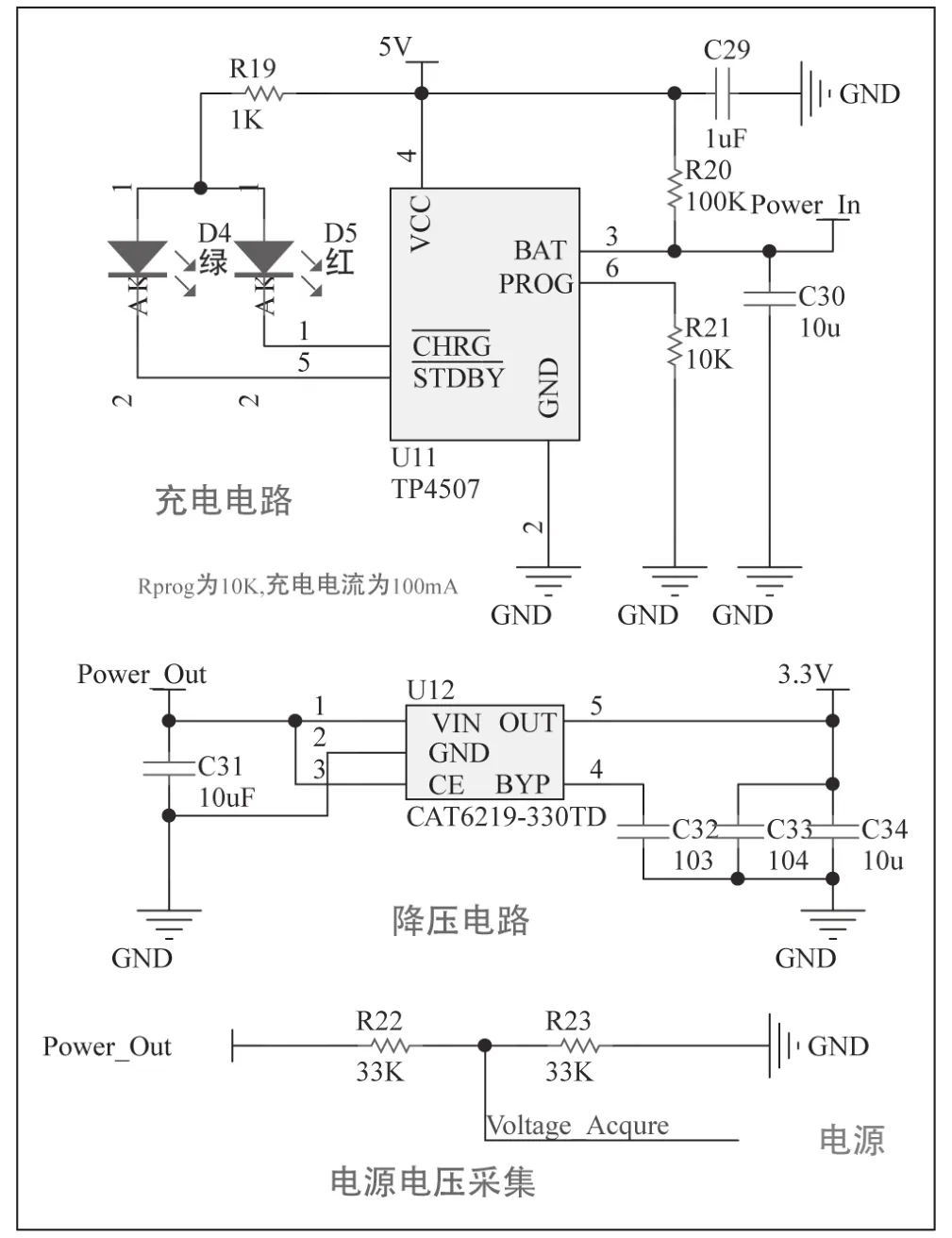
图5 电源管理模块原理图
补偿滤波算法是指以陀螺仪瞬时检测的角度作为基准,定时对加速度采样。采集数据的过程中,加速度计的高频信号与陀螺仪的低频信号是无关信号,需要在数据处理时滤除。之后通过平均处理来达到最终校正陀螺仪检测到角度的目的[3]。
在实际设计的过程中,需要额外考虑按键中断程序与数据发送中断程序。相比于查询的方式,中断处理令单片机暂停正在执行的程序而转去执行相应的服务处理程序;当服务处理程序运行完毕之后,CPU再返回到暂停处继续执行原来的程序。因此它保证了中断程序运行的实行性,减少了主程序运行的负担。
软件的设计框图如图6所示。
4 结束语

图6 软件设计流程图
本文在充分考虑到可穿戴式无线空中鼠标体积、成本、精确度、平滑性等因素的基础上,做了细致的研究、论证、设计、验证和调试的工作。根据前期的调研和分析,结合空中鼠标的特点,确定了系统硬件的总体设计方案。在Keil uVision4 MDK3.8A开发环境上进行了软件系统的各个模块设计。该方案实现的可穿戴式无线空中鼠标具有较高的平滑性和稳定性,能够方便用户在无距离的三维空间对电脑指针进行操作。在电脑指针的操控上还有一些需要改进的地方。电脑指针的移动的曲线呈现折线或是直角。因此,如何提高鼠标指针移动的动态性能将是穿戴式无线空中鼠标后续的研究方向。
