信号交叉口环保驾驶仿真评估*
2018-07-26姜慧夫
姜慧夫 安 实 王 健
(哈尔滨工业大学交通科学与工程学院 哈尔滨 150001)
0 引 言
近年来,随着我国道路交通运输系统的快速发展,空气污染问题日渐加剧。截至2016年底,我国道路交通温室气体排放量约占总排放量的14%,对人民生产生活造成严重影响[1]。为缓解道路交通空气污染问题,大量研究人员从不同的视角出发,提出相应的道路交通节能减排技术或方法,如公交优先[2]、信号控制[3]、新型燃料[4]、新型车辆动力系统[5]等。而随着近期车联网技术的快速发展,驾驶员辅助系统逐渐成熟,其能够帮助驾驶员获取目视无法获得的道路交通信息以保障车辆安全与运行效率[6]。该系统的出现为车辆节能减排提供了全新的视角,使得研究人员能够基于车辆运动与燃油消耗和污染物排放之间的关系,通过改变驾驶员的驾驶行为,避免高能耗、高污染的车辆运动,减少车辆燃油消耗与污染物排放[7-8]。目前,相关研究被命名为“环保驾驶”,其研究方向可细分为两大部分:高速公路环保驾驶[9-11]与信号交叉口环保驾驶[12-15],其差异为:高速公路环保驾驶采用减少车辆加减速运动以实现节能减排的目的;而信号交叉口在减少车辆加减速运动的同时,还要避免同样高能耗与高排放的停车怠速行为,以实现最优的节能减排效果。
目前,环保驾驶相关的理论研究正在快速发展,但相关的测试分析研究尚且匮乏。现有的环保驾驶测试分析多以高速公路为测试路网,信号交叉口范围内的环保驾驶测试较少[16-17]。同时,现有的环保驾驶测试分析多基于微观交通仿真工具,如Vissim或Paramics来进行,测试过程中采用软件内置的驾驶行为模型来模拟驾驶员的驾驶行为[18]。驾驶员的驾驶行为是影响环保驾驶实际效果的最重要因素,而由驾驶行为模型模拟出的驾驶行为与实际驾驶行为存在一定偏差,且驾驶行为模型无法反映不同驾驶员的驾驶行为差异,导致测试结果可信度不高,部分影响因素分析缺失等问题。此外,仅有的环保驾驶实地评估研究以单车为研究对象,虽能够准确测试驾驶员的环保驾驶行为,但由于缺乏对于周围交通环境的考量,使得测试评估结果与实际交通应用结果间仍存在一定的偏差[19]。
为解决以上问题,笔者面向环保驾驶车辆与非环保驾驶车辆混行的交通环境,构建了车辆驾驶仿真平台,并基于该仿真平台搭建了信号交叉口环保驾驶系统,测试驾驶员在环保驾驶系统辅助下的驾驶行为与实际环保驾驶效果。为对环保驾驶效果的影响因素进行全面地分析,研究中制定了仿真测试方案。研究结果将验证信号交叉口环保驾驶的实际应用价值,同时为信号交叉口环保驾驶的实际应用与进一步研究提供指引与支持。
1 仿真实验设计
1.1 仿真平台
PreScan是一款基于物理模型的仿真软件,具有支持多种传感器、GPS、车路通信和车车通信的优势。笔者以PreScan与Matlab Simulink为基础,构建环保驾驶车辆与非环保驾驶车辆混行环境下的车辆驾驶仿真平台,见图1。
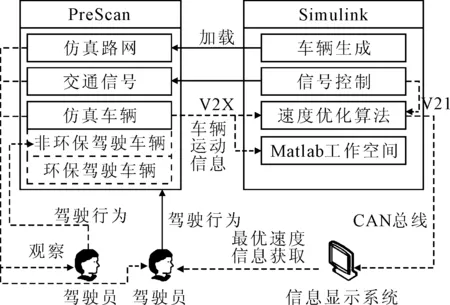
图1 仿真平台架构Fig.1 Architecture of simulation platform
该平台利用PreScan生成模拟驾驶场景与仿真车辆,并获取车辆运动信息;利用Simulink对路网中车辆生成与交叉口信号灯进行控制,并构建环保驾驶车辆的速度优化算法。PreScan中环保驾驶车辆通过车车/车路通信(V2X)与雷达传感器获取信号控制与前方车辆运动信息,并利用内置速度优化算法计算最优速度轨迹,通过CAN总线传递至车载信息显示系统,驾驶员根据最优速度信息作出相应的车速调整;PreScan中非环保驾驶车辆与周围车辆及交通设施无通讯联系,车辆未装配信息显示系统,驾驶员依靠肉眼观察判断车辆及周围交通状态并做出相应响应。所有车辆运动信息均存储于Matlab工作空间中,以供分析使用。
1.2 实验设计
1.2.1 仿真驾驶场景与车辆设计
仿真软件PreScan中的仿真路网设置见图2。仿真过程中,仿真车辆东向行驶,道路速度限制为60 km/h,交叉口采用定时信号控制。实验中仿真车辆的车型相同,仿真驾驶车辆界面见图3。驾驶员的驾驶行为模拟驾驶外设输入仿真系统。

图2 仿真路网Fig.2 Road network in the simulation

图3 车辆界面Fig.3 Vehicle interface
1.2.2 信息系统界面设计
设计了2种不同的信息系统界面,见图4。
1) 传统车辆时速表。高亮区域为最优速度区域,车辆行驶过程中最优速度区域不断变化,诱导驾驶员按照Simulink生成的最优速度轨迹行驶;驾驶员需使速度指针位于高亮区域内。该界面输出信息为瞬时式速度信息,驾驶员仅能获取当前时刻最优速度信息,无法获知历史及未来最优速度信息。
2) 车辆速度曲线表。高亮曲线为Simulink生成的最优速度轨迹,暗色曲线为车辆实际速度曲线;曲线上方暗色图标表示车速过高,需踩踏刹车踏板;高亮图标表示速度过低,需踩踏油门踏板;驾驶员需导使暗色曲线尽量靠近高亮曲线;曲线下方为当前实际速度值。该界面输出信息为连续式速度信息,驾驶员能够获取一定时段内的最优速度信息,包括历史、当前及未来的最优速度信息。
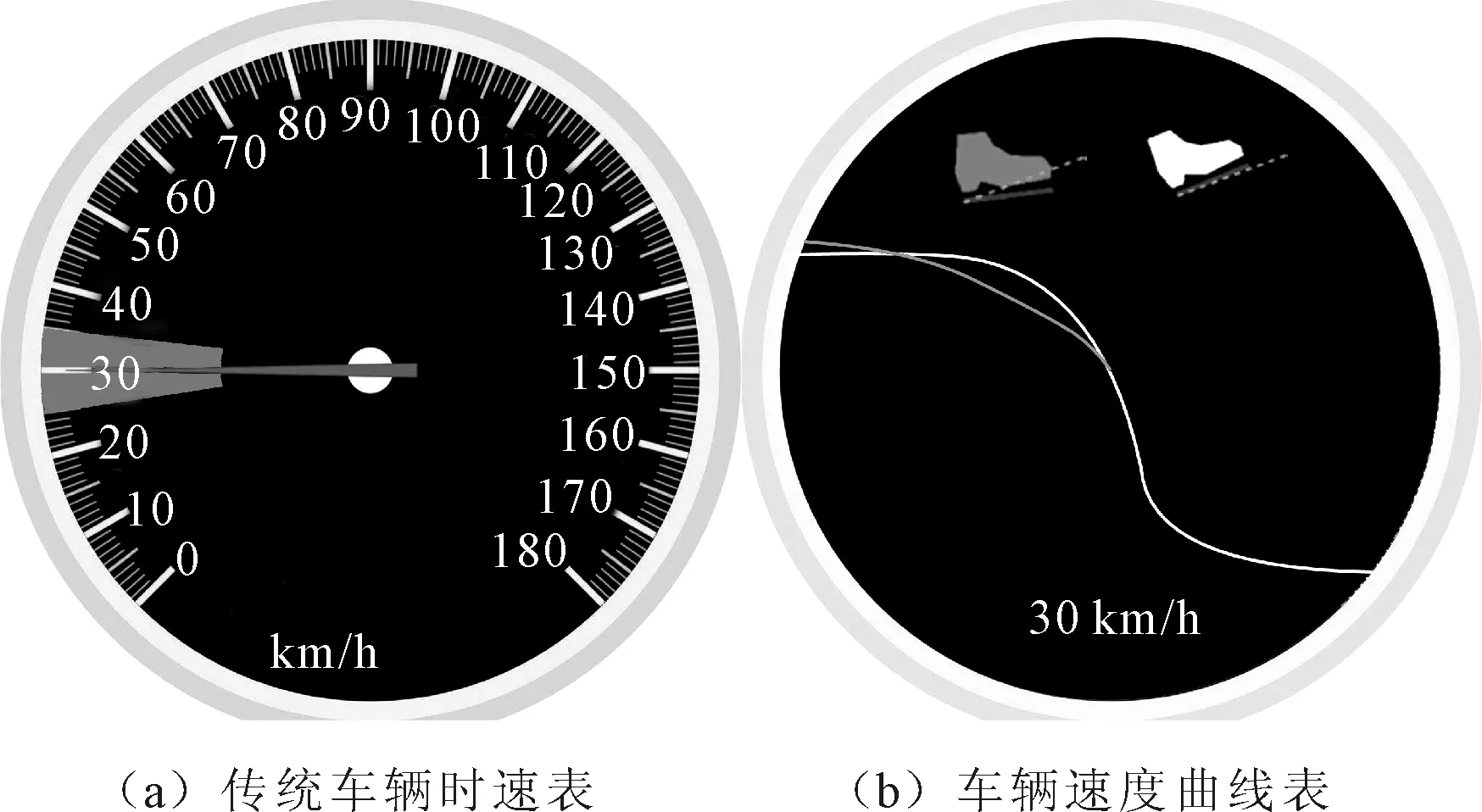
图4 信息系统界面Fig.4 Information system interface
1.2.3 环保驾驶辅助系统设计
为实现环保驾驶车辆速度优化,本文在仿真平台中构建了环保驾驶辅助系统,其架构见图5。
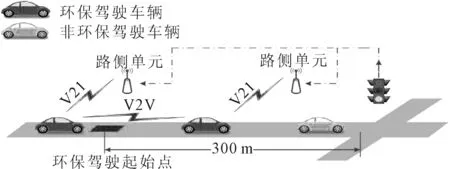
图5 环保驾驶辅助系统架构Fig.5 Architecture of eco-driving assistant system
信号灯通过专用短程通信(DSRC)向环保驾驶车辆发送信号控制信息,通信范围为300 m,因此,本文中环保驾驶范围设定为交叉口前300 m。环保驾驶车辆运行过程中通过V2V通信技术接收前方环保驾驶车辆运动信息,或利用车载雷达传感器获取前方非环保驾驶车辆的运动信息,为环保驾驶车辆内置环保驾驶速度优化算法提供数据输入。该系统能够测试环保驾驶车辆与非环保驾驶车辆混行环境下的车辆环保驾驶效果,为后续分析提供数据。
1.2.4 环保驾驶速度优化算法
该系统中采用Eco-Approaching环保驾驶速度优化算法为环保驾驶车辆生成最优速度轨迹[9]。该算法适用于环保驾驶车辆与非环保驾驶车辆混行的交通环境,基于庞特里亚金极小值原理(PMP)结构进行构建,具有无需提前定义车辆运行规则的特点。算法主体结构见式(1)。

(1)
式中:tL为预期终端时间(停车线处),s;t0为初始时间(检测器处),s;x(·)为车辆动态方程;u(t)为车辆加速度,m/s2,w1,w2为权重系数。
φ(x(tL))=w1(x(tL)-L)2+…+
w2(v(tL)-vL)2,w1∈R+,w2∈R+
(2)
式中:x(t)为车辆位置,m;v(t)为车辆速度,m/s;vL为期望终端速度,m/s。
(3)
式中:gt(t)为瞬时燃油消耗率,mg/s,可采用连续函数形式的车辆燃油消耗与污染物排放模型;w3均为权重系数。
式(1)为成本函数,速度优化过程以最小化该函数值为目标。式(2)为终端成本,即车辆到达交叉口的时间及速度约束。式(3)为运行成本,即车辆运行过程中消耗的燃油量。该速度优化模型本质为最优控制模型,采用基于PMP的求解算法进行求解,约束条件包括车辆初始位置、初始时间、速度范围、加速度范围等。关于终端时间算法详见文献[9]。
1.2.5 数据采集系统设计
仿真过程中,仿真平台能够直接提供的车辆运动信息包括车辆的空间位置、瞬时速度与加速度,但无法直接输出车辆燃油消耗与污染物排放量。因此,本文采用VT-Micro微观车辆燃油消耗与污染物排放模型来计算车辆燃油消耗与污染物排放量,该模型能够利用车辆运动信息计算车辆瞬时燃油消耗速率与污染物排放速率,其具体计算见式(4)。
(4)

数据存储结构为{位置坐标,速度,加速度,燃油消耗率、污染物排放率、时间戳}。仿真开始时,仿真车辆于仿真路网左端点处生成,因此空间位置坐标原点位于路网左端起始处。仿真过程中车辆的燃油消耗量与污染物排放量计算公式见式(5)。
(5)
式中:MOEe为车辆的燃油消耗量或污染物排放量,L或mg;T为仿真时长,s;f为数据采样频率,Hz。
1.2.6 仿真场景设计
文中欲测试的环保驾驶影响因素如下。
1) 人为因素。包括驾驶员性别、年龄、驾龄、环保驾驶训练时长。
2) 外部因素。包括信息系统界面类型、车辆类型、前方交通状态。
人为因素可通过制定合理的驾驶员抽样方案来实现。本文抽取的受试驾驶员样本数量为40,详细的抽样方案见表1。
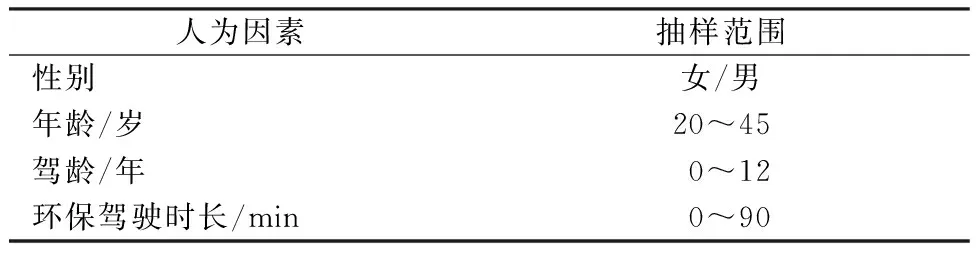
表1 受试驾驶员抽样方案Tab.1 Sampling scheme for tested drivers
外部因素可通过调整仿真系统设置来实现。信息系统界面包括传统车辆时速表与车辆速度曲线表两种类型。车辆类型包括环保驾驶车辆与非环保驾驶车辆。在实际交通运行过程中,前方交通状态会对当前仿真车辆运动造成影响,为全面分析不同前方交通状态对环保驾驶效果的影响,仿真过程中需为仿真车辆设置不同的场景,如表2所示。其中将仿真车辆为非环保驾驶车辆,无前方车辆的场景定义为基准场景,即驾驶员仅需依靠肉眼观察交叉口信号控制进行驾驶的无环保驾驶场景;其余所有场景均被定义为环保驾驶场景。相邻2车均为环保驾驶车辆的场景中,前方车辆对驾驶员的影响与最优速度信息对驾驶员的影响相似,仿真车辆表现与表2中环保驾驶A类场景中的车辆表现相似,因此仿真测试中未进行单独测试。仿真过程中,每位受试驾驶员均需在每种场景中完成多次仿真驾驶任务。后续分析中,所有环保驾驶场景的收益计算均以基准场景中仿真车辆燃油消耗与污染物排放量为基准。计算方法见式(6)。
(6)

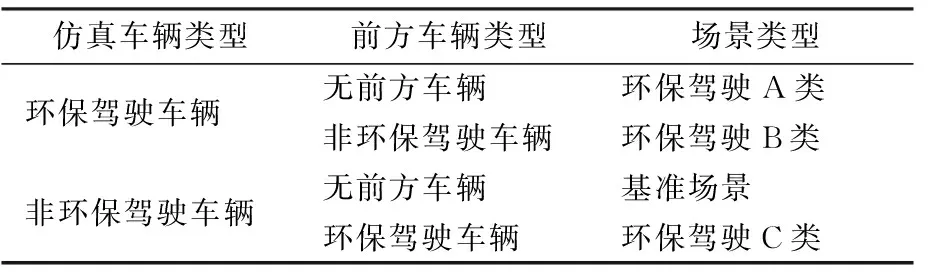
表2 场景设计方案Tab.2 Design scheme for scenarios
2 实验结果分析
2.1 环保驾驶宏观效果
图6所示为仿真过程中无前方车辆场景下具有代表性的环保驾驶车辆与非环保驾驶车辆的速度轨迹曲线。对比图中2条速度轨迹曲线可以发现如下规律:①环保驾驶车辆速度变化幅度与加减速运动持续时间均明显低于非环保驾驶车辆;②环保驾驶车辆能够避免非环保驾驶车辆的交叉口前停车等待行为,即车辆速度不为0 m/s。速度波动减小意味着时空轨迹平滑,因此相较于非环保驾驶车辆,环保驾驶车辆将具有更加平滑的时空轨迹,其交叉口延误时间将显著降低。同时加减速过程数量减少及持续时间减低,有助于减少车辆冲击,提升舒适性。
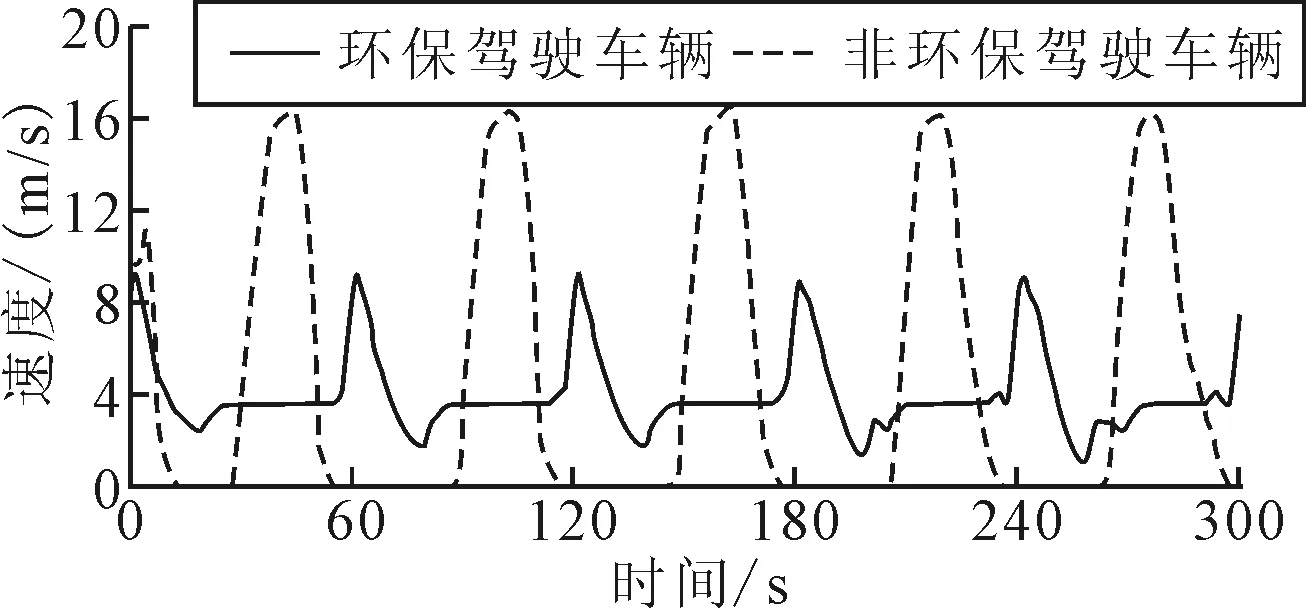
图6 无前方车辆场景中仿真车辆速度轨迹Fig.6 Speed trajectories of simulated vehicles in thescenarios without preceding vehicle
图7所示为环保驾驶场景与基准场景中车辆平均燃油消耗与污染物排放量及相应收益。对比发现,环保驾驶场景下车辆燃油消耗量与污染物排放量均显著降低,降幅可达10%以上,即环保驾驶能够有效降低车辆运行过程中燃油消耗与污染物排放量。
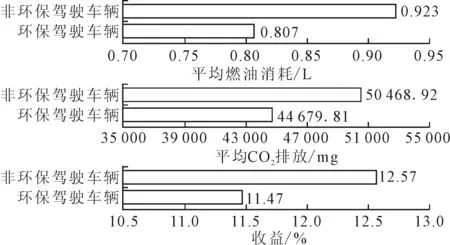
图7 车辆平均燃油消耗与污染物排放及相应收益Fig.7 Average fuel consumption and emissions of vehicles and corresponding benefits
2.2 人为因素分析
2.2.1 性别因素分析
图8为仿真过程中女/男性驾驶员所驾车辆的平均燃油消耗收益与污染物排放收益。比对发现,女性驾驶员与男性驾驶员在燃油消耗收益与污染物排放收益两方面仅存在微小差异。经置信区间为95%的T检验后发现,女性驾驶员与男性驾驶员在燃油消耗收益与污染物排放收益两方面均不存在统计学上的显著差异。性别对环保驾驶效果无影响。
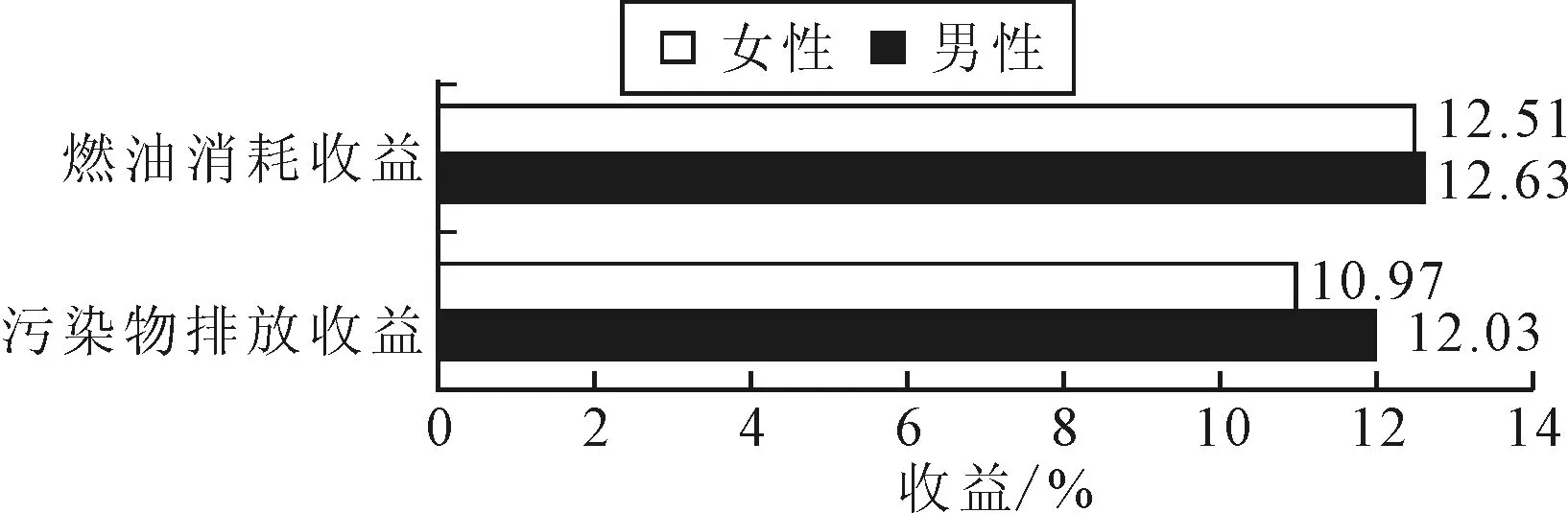
图8 女/男性驾驶员所驾车辆的燃油消耗与污染物排放收益Fig.8 Fuel consumption and emissions benefits of vehicles operated by female/male drivers
2.2.2 年龄因素分析
图9所示为不同年龄阶段驾驶员在仿真过程中所驾车辆的平均燃油消耗收益与污染物排放收益。观察发现,不同年龄阶段驾驶员的在燃油消耗收益与污染物排放收益两方面存在微小差异,T检验显示不同年龄阶段驾驶员在燃油消耗收益与污染物排放收益两方面均不存在统计学上的显著差异。驾驶员年龄对环保驾驶效果无影响。
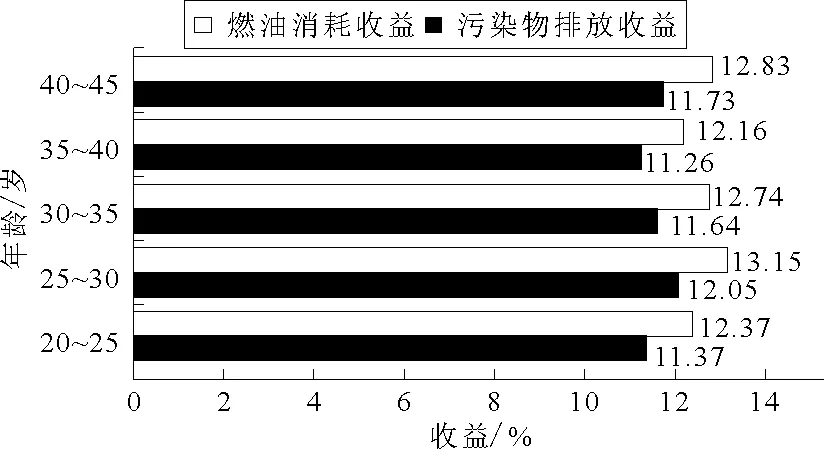
图9 不同年龄驾驶员所驾车辆燃油消耗与污染物排放收益 Fig.9 Fuel consumption and emissions benefits of vehicles operated by drivers of different ages
2.2.3 驾龄因素分析
图10所示为不同驾龄范围驾驶员在仿真过程中所驾车辆的平均燃油消耗收益与污染物排放收益。经置信区间为95%的T检验后发现,不同年龄阶段驾驶员在燃油消耗收益与污染物排放收益两方面均具有显著差异。随着驾龄的增长,车辆燃油消耗收益与污染物排放收益逐渐上升;当驾龄达到4~6年后,车辆燃油消耗收益与污染物排放收益分别达到11.93%与13.13%的峰值,即驾龄4~6年的驾驶员在经过环保驾驶训练后能够获得最好的环保驾驶效果;随着驾龄的进一步增长,车辆燃油消耗收益与污染物排放收益出现幅度小于1%的微小下降。不同驾龄范围内车辆燃油消耗收益与污染物排放收益均高于10%,环保驾驶适用于不同驾龄的驾驶员。
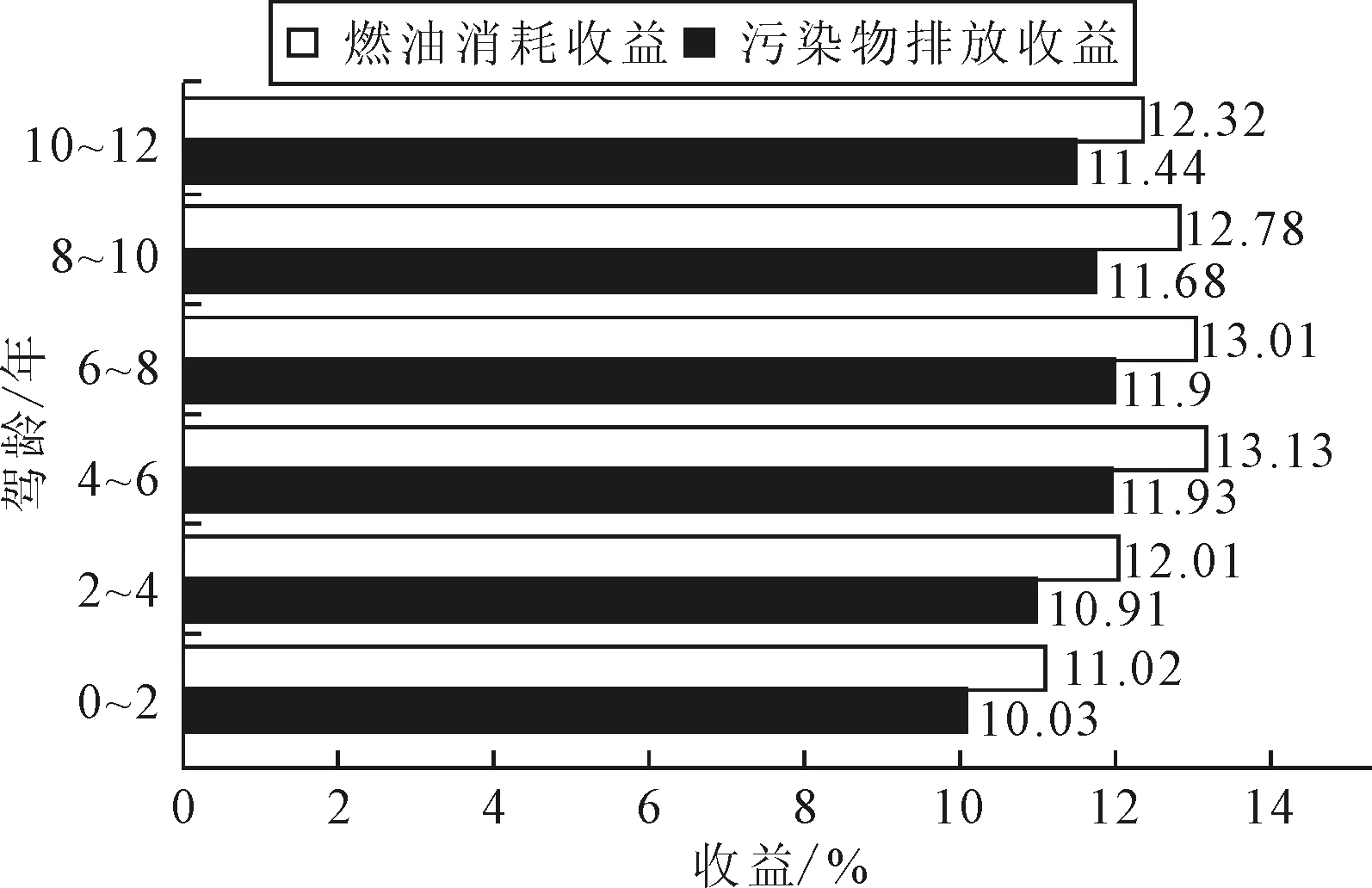
图10 不同驾龄驾驶员所驾车辆的燃油消耗与污染物排放收益 Fig.10 Fuel consumption and emissions benefits of vehicles operated by drivers of different driving experience
实验过程中通过观察驾驶员驾驶行为可以发现,驾龄4~6年的驾驶员在环保驾驶过程中能够更加熟练地兼顾观察路况信息与环保驾驶速度信息,同时能够更加快速地对观察到的信息做出反应进行驾驶行为调整,因此,其环保驾驶收益最高;驾龄0~4年的驾驶员,其驾驶操作熟练程度与多源信息的兼顾能力随驾龄增长而逐渐增强,因此,其环保驾驶收益随驾龄增长而上升;而驾龄6~12年的驾驶员,由于其存在大量不良驾驶行为并难以在短时间内改正,使其所驾车辆实际速度与最优速度偏差较大,环保驾驶收益随驾龄增长而出现小幅下降。
2.2.4 环保驾驶训练时长因素分析
图11为不同环保驾驶训练时长下驾驶员所驾车辆的平均燃油消耗收益与污染物排放收益。T检验显示,不同训练时长下驾驶员在燃油消耗收益与污染物排放收益两方面均具有显著差异。驾驶员在环保驾驶初期,即0~15 min内仅能取得低于5%的燃油消耗收益与污染物排放收益,但随着训练时长的增加两方面收益快速上升,当训练时长大于60 min后,2种收益的增长趋势逐渐趋于平缓。
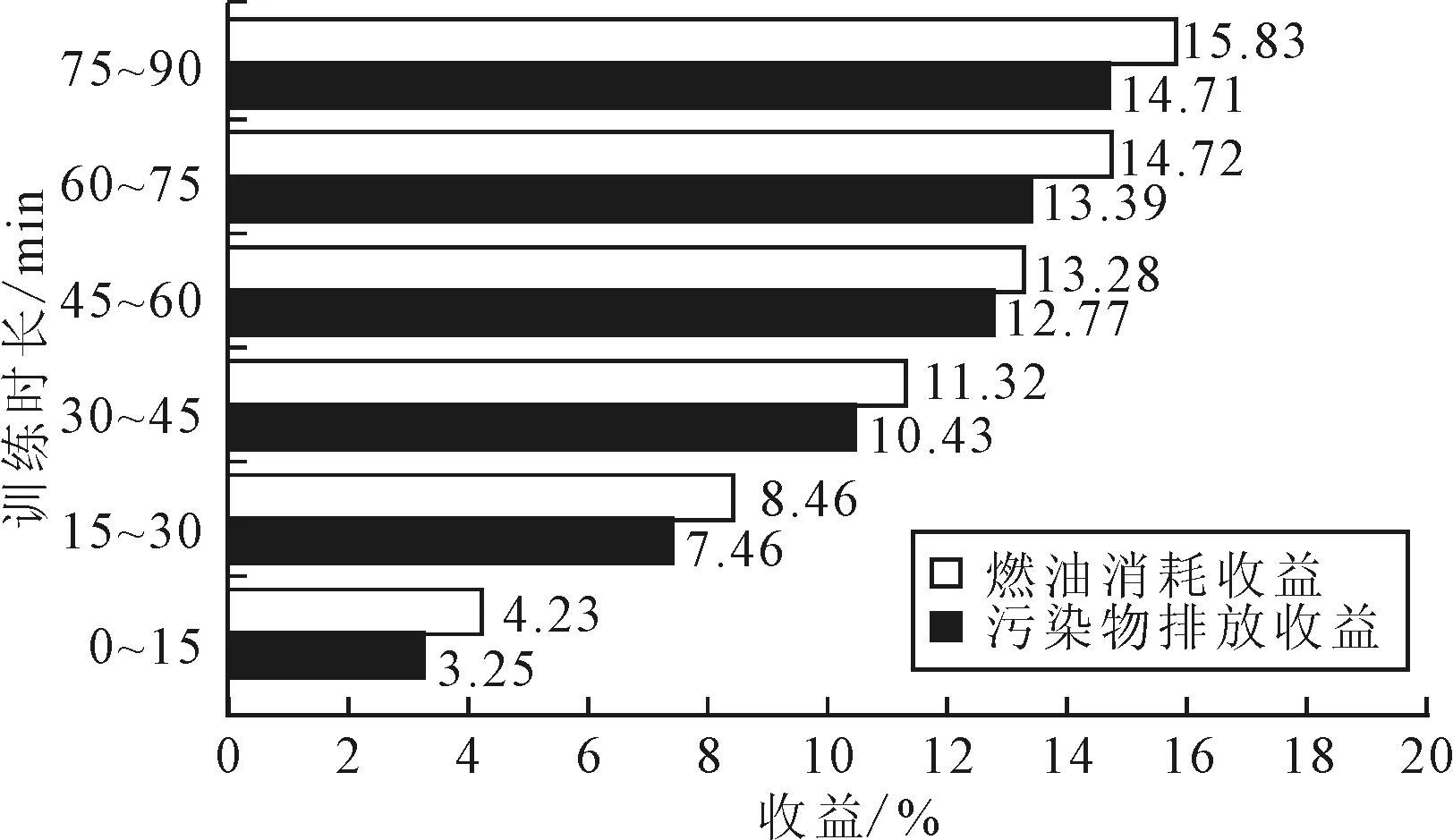
图11 不同环保驾驶训练时长下驾驶员所驾车辆的燃油消耗与污染物排放收益 Fig.11 Fuel consumption and emissions benefits of vehicles operated by drivers of different eco-driving training durations
图12为不同环保驾驶训练时长下某驾驶员驾驶车辆的速度轨迹曲线。通过观察发现,驾驶员驾驶仿真车辆所得的实际速度轨迹与最优速度轨迹间存在一定偏差,且随着环保驾驶训练时长的增加,实际速度轨迹与最优速度轨迹间的偏差逐渐缩小。当训练时长达到75~90 min时,实际速度轨迹(黑色粗实线)已能较好地符合最优速度轨迹(灰色实线)。以上仿真结果说明:①驾驶员的环保驾驶训练时长对环保驾驶效果具有显著影响;②驾驶员需要一定时长的环保驾驶训练才能得到较好的环保驾驶效果,且训练时长不应短于60 min,即驾驶员需先期进行约60 min环保驾驶培训方可上路实际操作,以免影响交通整体运行;③环保驾驶长期实施后,车辆燃油消耗收益与污染物排放收益预计将分别上升至15.5%与14.5%以上。
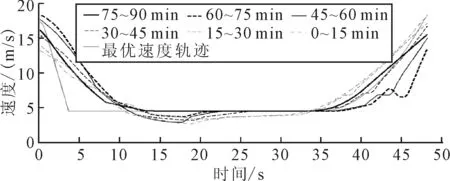
图12 不同环保驾驶训练时长下驾驶员所驾车辆速度轨迹 Fig.12 Speed trajectories of vehicles operated by driversof different eco-driving training durations
2.3 外部因素分析
2.3.1 信息系统界面类型因素分析
图13所示为不同信息系统界面类型下车辆的燃油消耗收益与污染物排放收益。T检验结果表明具有不同信息系统界面的车辆在燃油消耗收益与污染物排放收益两方面均具有显著差异。以车辆速度曲线表显示最优速度信息的车辆,其燃油消耗收益与污染物排放收益显著高于以传统车辆时速表显示最优速度信息的车辆。

图13 不同类型信息系统界面下车辆的燃油消耗与污染物排放收益 Fig.13 Fuel consumption and emissions benefits of vehicles with different types of information system interface
图14为不同信息系统界面类型下车辆的速度曲线。对比发现,配置车辆速度曲线表的车辆,其速度曲线更加接近最优速度轨迹,即在实际速度与最优速度出现偏差的情况下,通过车辆速度曲线表获取最优速度信息的驾驶员能够更快的做出反应以调节车辆速度,使实际车速尽快达到最优车速。
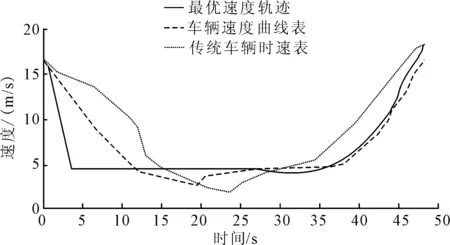
图14 不同类型信息系统界面下车辆的速度轨迹 Fig.14 Speed trajectories of vehicle with different typesof information system interface
仿真驾驶后驾驶员问卷调查显示,车辆速度曲线表能够提供未来一段时间内的最优速度轨迹,使驾驶员能够进行合理预判;而传统车辆时速表仅能显示当前最优速度信息,驾驶员反应滞后现象严重。因此,环保驾驶信息系统界面更适宜采用车辆速度曲线表形式。
2.3.2 车辆类型因素分析
图15为不同场景类型下的车辆燃油消耗收益与污染物排放收益。不同场景的车辆燃油消耗收益与污染物排放收益均具有显著差异。其中,环保驾驶A类场景的收益最高,环保驾驶C类场景的收益最低。结合表2可知,在无前方车辆,且仿真车辆为环保驾驶车辆的情况下,车辆燃油消耗收益与污染物排放收益最高;当系统中出现非环保驾驶前车时,环保驾驶车辆的驾驶员行为受到影响,车辆燃油消耗收益与污染物排放收益出现幅度为2%~3%的下降;当仿真车辆为非环保驾驶车辆,且存在环保驾驶前车时,非环保驾驶车辆的驾驶员由于受到前方环保驾驶车辆运动的影响,其驾驶行为会产生一定的环保趋向变化,进而获得一定的车辆燃油消耗收益与污染物排放收益。
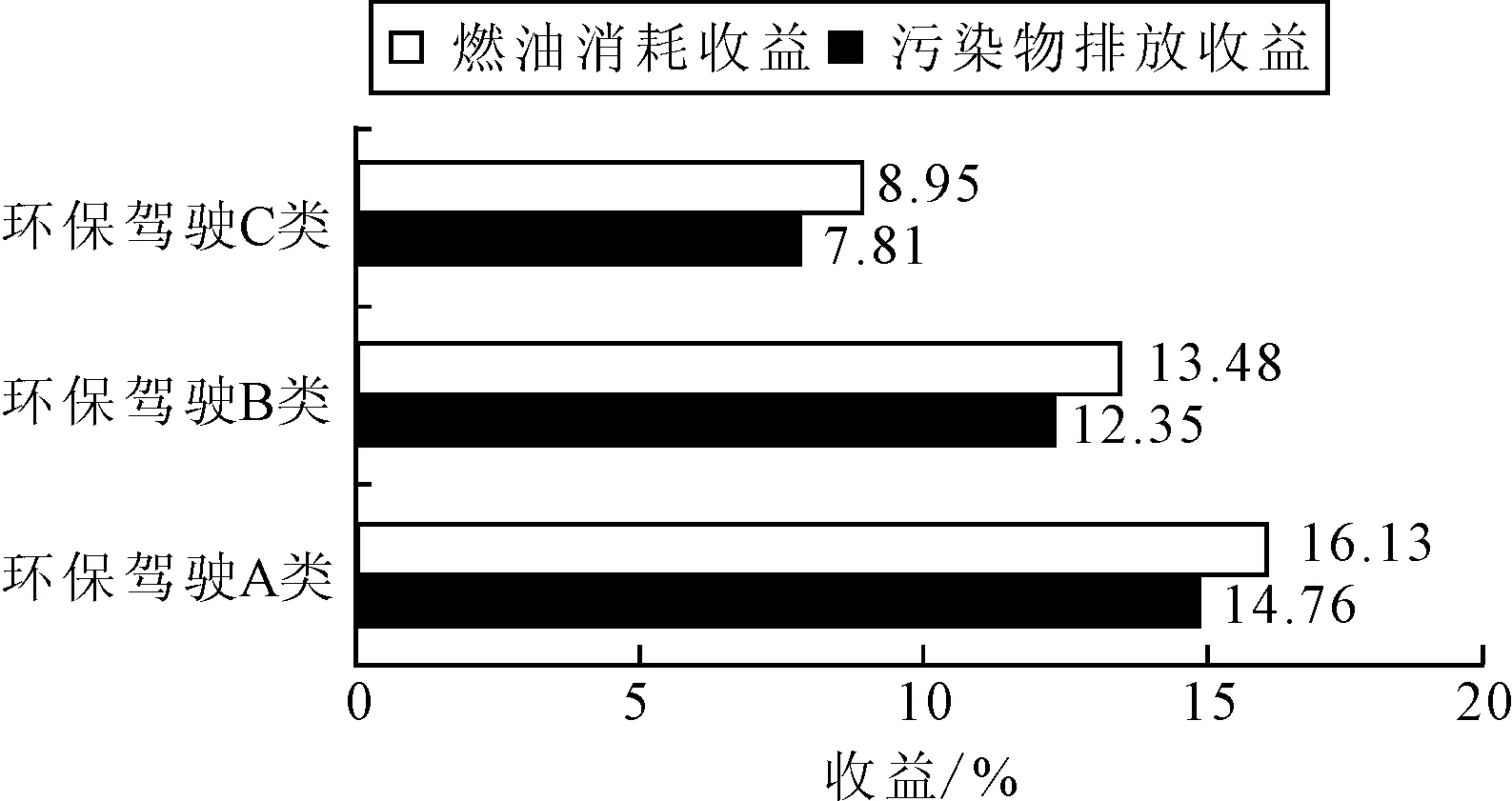
图15 不同类型场景下的燃油消耗与污染物排放收益 Fig.15 Fuel consumption and emissions benefits of vehicles in different types of scenarios
图16为不同类型场景中车辆的速度轨迹曲线。图中环保驾驶A类场景中车辆实际速度曲线与最优速度曲线间累积偏差最小;环保驾驶B类场景中仿真车辆由于受到前方非环保车辆运动的影响,其实际速度曲线与最优速度曲线间误差较A类场景中有所增大;环保驾驶C类场景中非环保驾驶车辆由于受到前方环保驾驶车辆的影响,其速度轨迹整体呈现出一定的环保驾驶趋势,但其与最优速度曲线间误差较大,且速度波动现象严重。结合3类场景下的收益变化规律可以发现:①环保驾驶范围内,非环保驾驶车辆在前方环保驾驶车辆的影响下,能够取得一定的环保驾驶效益,即环保驾驶系统能够通过控制环保驾驶车辆“间接”控制非环保驾驶车辆,进而改善交通流整体运行状态;②环保驾驶车辆在前方非环保驾驶车辆的影响下,其环保收益会产生一定的损失,即非环保车辆对后方环保驾驶车辆具有一定的负面作用;③环保驾驶车辆的环保收益高于非环保驾驶车辆。车辆类型与车辆前方交通状态均会对车辆环保驾驶效果造成显著影响。
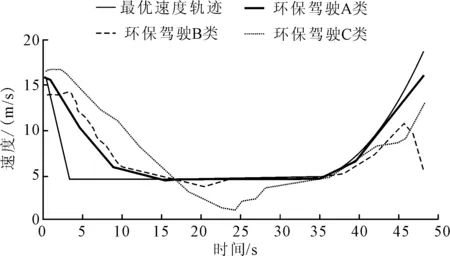
图16 不同类型场景下的车辆速度轨迹 Fig.16 Speed trajectories of vehicle in different types of scenarios
3 结 论
1) 环保驾驶能够有效改善环保驾驶车辆与非环保驾驶车辆混行环境下信号交叉口范围内的车辆平均燃油消耗,降低车辆平均污染物排放,其节能减排幅度分别可达12.57%与11.47%。
2) 驾驶员性别、年龄对车辆环保驾驶效果无影响,环保驾驶适用于不同年龄范围的女性与男性驾驶员。
3) 驾驶员驾龄对车辆环保驾驶效果具有显著影响,其接受环保驾驶的最佳驾龄为4~6年,驾龄过大易造成驾驶员固有不良驾驶习惯对环保驾驶效果造成一定的负面影响,环保驾驶相关培训应在驾驶员准驾后尽早启动。
4) 环保驾驶训练时长对车辆环保驾驶效果具有显著影响,且呈正相关关系,驾驶员应进行不小于60 min的环保驾驶训练以获取较好的环保驾驶效果。
5) 信息系统界面类型对车辆环保驾驶效果具有显著影响,环保驾驶车辆更适宜采用车辆速度曲线表作为最优速度信息显示界面。
6) 车辆类型对车辆环保驾驶效果具有显著影响。环保驾驶车辆与非环保驾驶车辆混行环境下,环保驾驶车辆的环保收益显著高于非环保驾驶车辆。
7) 前方交通状态对车辆环保驾驶效果具有显著影响。环保驾驶车辆与非环保驾驶车辆混行环境下,非环保驾驶车辆会对后方紧邻环保驾驶车辆的环保收益造成负面影响;环保驾驶车辆可帮助后方紧邻非环保驾驶车辆获取可观的环保收益。交叉口范围内环保驾驶效果将随环保驾驶车辆占比的上升而逐渐增强。
