广州地铁3号线列车牵引/制动指令电路优化
2018-07-26吕钟一孙壮壮
吕钟一 孙壮壮
(广州地铁集团有限责任公司运营事业总部,广东广州510310)
0 引言
广州地铁3号线列车在正线运营过程中,多次出现连续几个站台列车在进站过程中ATO超速紧制的现象,而其在人工驾驶模式下进站正常。紧急制动导致列车无法自动对标,人工驾驶条件下列车的运行速度一般低于列车的推荐速度,且紧急制动需要手动缓解,列车才能继续运行,导致列车出现了较大的晚点。
1 现象描述
列车在ATO模式下,连续在多个站台进站减速过程中出现“列车自动保护系统(ATP)紧急制动”,故障记录如图1所示。列车牵引过程无异常,转换为手动驾驶后列车进站无异常,列车信号系统在故障时刻显示超速紧制。
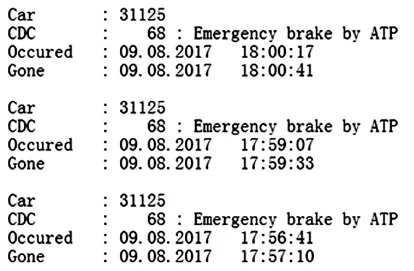
图1 中央控制单元故障记录
2 问题分析
根据故障的现象可以判断列车在故障时刻因超速导致了紧急制动,参阅文献[1],造成列车超速的原因可能如下:(1)列车施加的实际制动力未达到预设值;(2)列车在有常用制动请求时未施加制动;(3)列车无常用制动请求。
根据图2,列车在超速紧制前一直处于加速状态,因此可以排除第(1)种可能。

图2 列车速度曲线
参阅文献[2-3],列车控制系统判断有常用制动施加请求需要满足两个条件:(1)列车处于制动状态;(2)列车有制动力参考值。
列车有牵引、制动及惰行三种运行状态,列车的运行状态通过牵引/制动指令的组合判断,牵引/制动状态与牵引指令及制动指令之间的关系如表1所示。

表1 牵引/制动状态判断表
查看表1可以得出只有在列车的制动指令为高电平而牵引指令为低电平时,列车控制系统判断列车在制动状态。查看故障时刻的事件记录仪,如图3所示,列车在超速紧急制动前,制动指令一直处于低电平,列车为惰行状态。
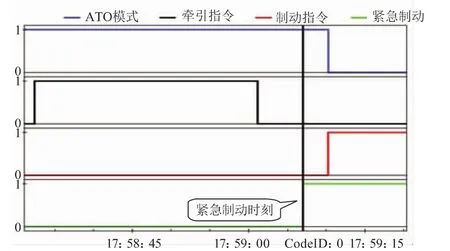
图3 列车事件记录仪
正常条件下,列车在ATO模式下运行牵引/制动指令均由信号系统给出,手动驾驶模式下牵引/制动指令由司控器给出,牵引/制动指令控制逻辑如图4所示。而当列车操作了牵引/制动指令旁路时,由于司控器至牵引/制动指令的列车线被接通,列车在ATO模式下牵引/制动指令即受信号系统控制也受司控器控制。而受到司控器机械构造的影响,司控器手柄在“零位”时,列车的制动指令回路将被接通,控制逻辑内表现为低电平(制动指令因导向安全,制动列车线高电平表示制动缓解,内部逻辑表现为低电平)。
牵引/制动指令旁路由司机室开关面板上的微动开关控制,查看微动开关状态发现列车的牵引/制动指令旁路被合上,在试车线模拟牵引/制动指令旁路在合位,ATO模式下运行到接近目标点时,列车显示为惰行状态。而当列车的实际速度超过推荐速度5%时,信号系统判定列车超速,列车施加紧急制动,与正线的故障一致。
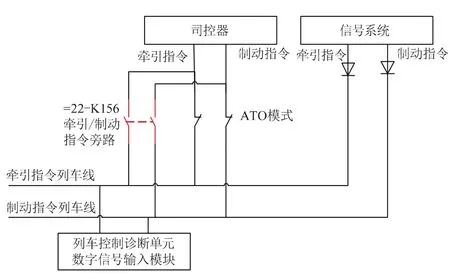
图4 牵引/制动指令逻辑图
综合上述分析,可以判定此次故障直接原因为人为因素所致,同时本次故障也暴露出了电路在设计时存在缺陷,导致列车的牵引/制动指令受两套系统控制。
3 电路优化方案
改造原理:此次故障可以归结为在操作旁路状态下,列车的牵引/制动指令受司控器及信号系统两套系统控制所导致。通过对牵引/制动指令电路进行优化,保障在任何时刻牵引/制动指令只受一套系统控制。
3.1 改造方案
在ATO模式的保持回路中增加一个牵引/制动指令旁路的常闭控制节点,如图5所示。当列车操作了牵引/制动指令旁路时,列车ATO模式的自保持回路保持断开状态,列车无法进入/保持ATO模式,司机只能通过人工驾驶模式动车。
3.2 风险分析
在ATO模式保持回路中增加了一个控制节点,ATO模式保持回路的可靠性将降低,列车可以人工模式动车,但避免了人为因素导致列车晚点的风险,与改造之前相比,整体风险没有增加。
牵引/制动指令异常将导致列车不能动车,造成救援风险,从整体上分析,改造未新增列车不能动车的隐患,列车牵引/制动指令旁路的功能得到保障。
4 结语
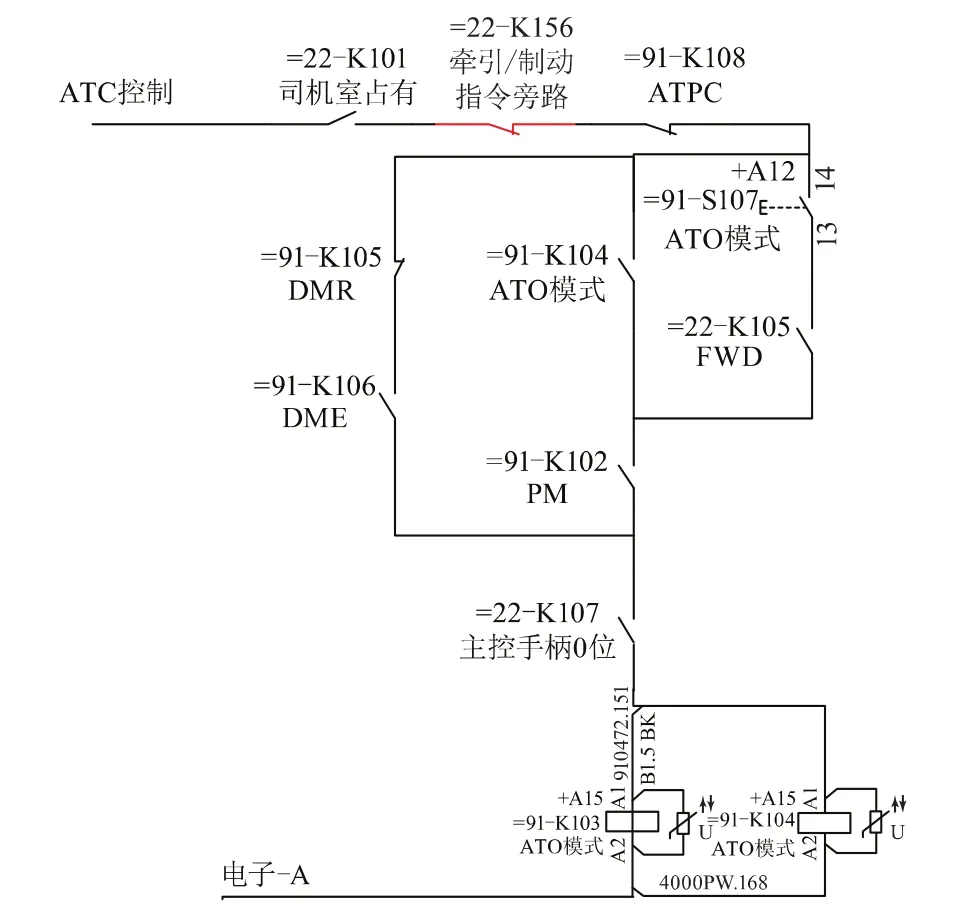
图5 ATO模式电路修改
本次故障直接原因为人为因素导致,在深层次剖析根本原因后可知,故障为电路设计不完善、考虑不全面所致。通过电路优化,在未新增风险的情况下解决了目前存在的问题。
广州地铁3号线车辆按照上述改造方案进行了样车改造工作,库内及试车线测试已全部通过,并计划推广到广州地铁所有类似车型的改造工作中。
