现代有轨电车一体化仿真系统设计与实现
2018-07-25潘炜维王园园徐纪康
滕 靖,潘炜维,王园园,徐纪康
(1. 同济大学道路与交通工程教育部重点实验室,上海 201804;2. 同济大学建筑与城市规划学院,上海 201804;3. 上海工程技术大学城市轨道交通学院,上海 201600)
1 现代有轨电车概述
1.1 研究背景
现代有轨电车于20世纪90年代后期率先在法国发展起来,经过20多年的发展,目前世界上已有150多座城市建设了现代有轨电车。现代有轨电车在我国公共交通系统中的应用尚处于起步发展阶段。目前,长春、大连、天津、上海、沈阳等地已陆续开通有轨电车线路,其中沈阳市浑南新区有轨电车已成网运行。还有许多城市正在规划和建设有轨电车系统,如北京、上海、广州、深圳、珠海、苏州、武汉、佛山等城市。据统计,我国目前已经在建或规划的现代有轨电车线路达50多条,规划总里程超过2 000 km[1]。
现代有轨电车是由电气牵引、轮轨导向的低地板式电动车辆,运行在专用轨道上,独立路权的区段比例高,与道路交通多采用平面交叉形式。通常道路交叉口混合路权是影响现代有轨电车通过能力的主要因素,且由于现代有轨电车车站多结合交叉口设置,车组的转向也在交叉口完成,因此对道路交叉口的设计及控制方案优化是有轨电车工程设计的难点之一。此外,有轨电车的折返形式影响列车交路的设置及折返能力,也需要进行专门评价。当多条有轨电车线路共线运行时,道岔转换效率往往会影响过岔能力,且转换过程还需要与交叉口信号切换相适应。由此可见上述方面均会影响有轨电车线路运输能力,是工程设计论证的要点。
基于以上背景,笔者提出了有轨电车一体化仿真系统来评价规划设计方案,其特点是将有轨电车自身运行和对道路交通(机动车、非机动车、行人交通)等的影响一并分析,既可输出线路整体服务指标,也可输出线路局部要素运行指标,从而有利地支持工程设计方案间的比选、设备的选型及运营组织方案的优化等决策工作。
1.2 相关研究综述
在仿真评价方法和对象方面,国内外科研人员对有轨电车运行仿真评价方法进行了卓有成效的研究。王艳荣[2]着重对未运行有轨电车、运行有轨电车和设置有轨电车信号优先的3种交叉口状态下社会车辆通行延误进行仿真比较。施冰[3]以有轨电车平面交叉口延误作为研究对象,探究了各因素对交叉口车辆及有轨电车延误的影响大小,为交叉口规划设计提供控制策略选取建议和参考。刘立龙[4]对有轨电车交叉口信号优先控制策略进行了设计,以固定配时信号控制为基础,针对绝对优先、完全优先、部分优先3种优先策略,建立单点交叉口路网仿真模型,模拟探究各种情景下的最佳控制策略,为实际应用提供了参考和建议。章瑀[5]对有轨电车交叉口信号无优先、绝对优先、相对优先、单点平衡控制策略进行建模仿真,分析策略评价结果后得出单点平衡策略可以较好地平衡有轨电车的通行优先与交叉口车辆的排队拥堵。吴胜权等[6]提出了一种分析有轨电车线路对城市道路交叉口影响的评价方法,通过仿真模型计算了交叉口内车辆延误和排队长度等参数。总的来说,现代有轨电车运行仿真研究重点集中于交叉口设计和控制方案的评价,相关理论成果已较为完备;但现有的研究成果多将有轨电车与常规地面交通车辆等同考虑,没有将有轨电车动力学特征、车体要素特征、道岔转换能力、车载信号安全要求等特征要素纳入仿真过程。
在仿真系统研发方面,有轨电车的运行环境涉及轨道交通和道路交通两个系统,在各自领域里相关的仿真方法和商用软件均已成熟。其中轨道交通仿真的代表性软件有Open track、Railsys等,能较好地模拟高铁、地铁等轨道交通的列车运行过程;道路交通仿真的代表性软件有Vissim、AIMSUN等,Vissim具备了道路交通全模式仿真能力,其市场占有率和应用也最为广泛。但是面向有轨电车运行特征,具备轨道列车和道路交通一体化混合仿真能力的软件系统少有研发。
2 现代有轨电车仿真系统架构和功能
2.1 仿真系统架构
在现代有轨电车项目设计、建设和管理决策过程中,一体化评价的需求是突出特点,如:有轨电车的运行分析需要体现道路交通控制对轨道列车运行过程的影响;有轨电车自身运行特点对道路交通控制带来的影响,例如最小绿灯时间、绿灯间隔、信号优先需求等需要结合轨道列车的动力特点和几何特点进行分析;有轨电车成网后的运营特征需要一体化的环境进行整体分析,例如互联互通的道岔与道路信号控制的组合,多线路共用折返站的调度协同等。
笔者所提出的一体化仿真系统将道路、交通车辆、行人以及道路交通控制设施和轨道列车、道岔、信号控制等放在一个仿真环境中进行模拟。仿真系统由有轨电车仿真系统和道路交通仿真系统两部分组成,其中有轨电车仿真系统(EasyTram)的主要功能是提供轨道列车的牵引计算、道岔和信号状态的反馈、停站和折返的计算;道路交通仿真系统直接采用了Vissim,主要为有轨电车提供道路交通的运行环境以及交叉口信号控制方案。EasyTram与Vissim之间通过通信模块进行实时通信,即EasyTram从Vissim中获取车辆位置坐标和信号状态等信息,然后通过有轨电车运行过程控制模块控制Vissim中相应车辆的驾驶行为。仿真的步长时钟由 EasyTram控制,具体的系统架构如图1所示。
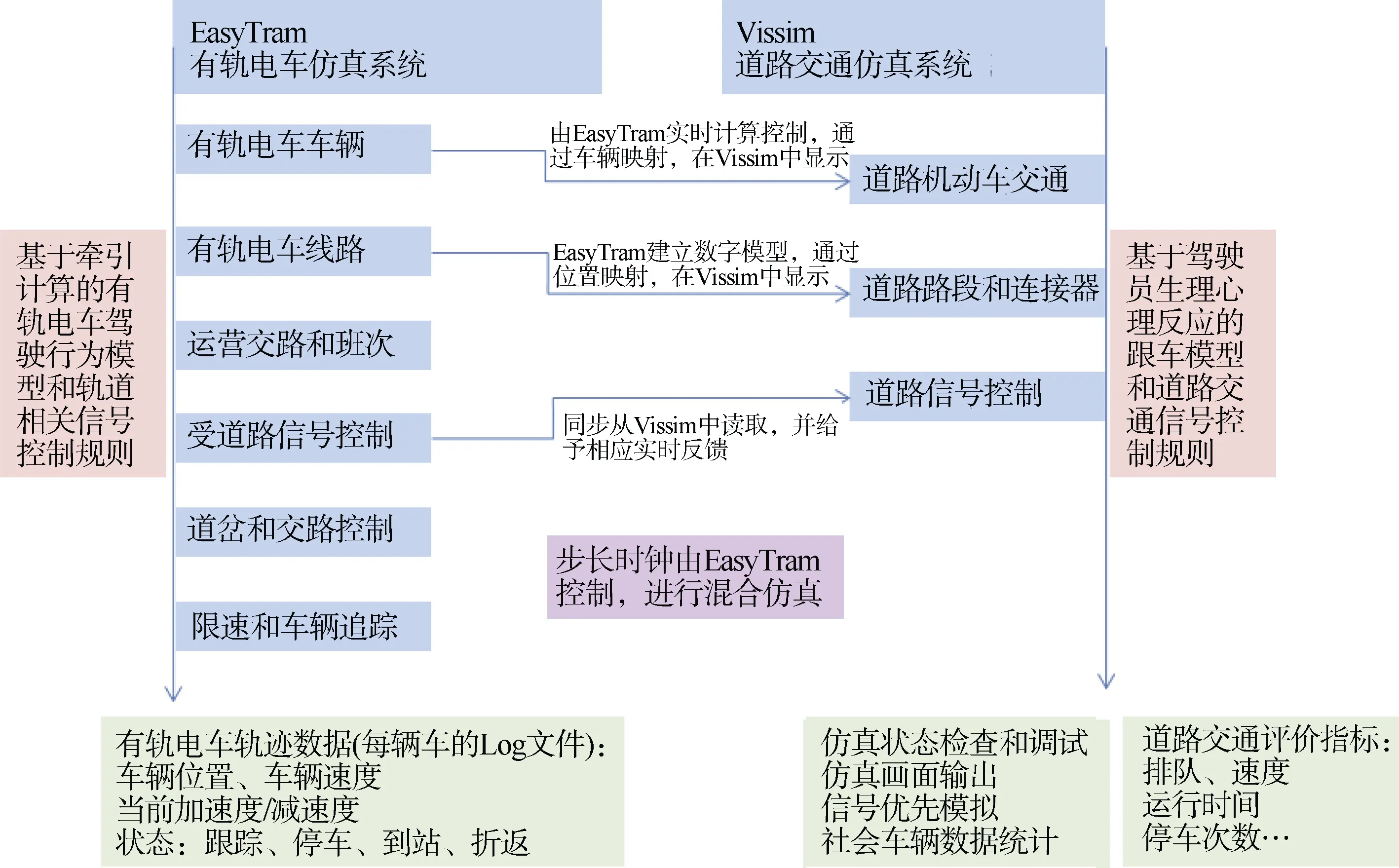
图1 有轨电车一体化仿真系统的整体结构Fig. 1 Overall structure of the tram integrated simulation system
当仿真周期为i时刻时,EasyTram的所有逻辑计算完成后,EasyTram驱动有轨电车仿真进入i+1周期中。同时,Vissim收到EasyTram的驱动信息后,也进入i+1周期中,并将i+1周期中的道路交通车辆和信号信息发送给EasyTram,然后进入下一周期的仿真,保证了EasyTram和Vissim的仿真时钟周期的同步。
EasyTram由通信接口模块、有轨电车运行过程逻辑计算模块、界面显示模块以及与外部其他硬件通信的扩展模块4部分组成。4个模块之间的相互数据流关系如图2所示,这种模块设计的耦合性较低,便于以后的平台扩展。
2.1.1 Vissim的通信接口模块
为了有效展示 EasyTram的控制效果,需要每个仿真步长将 EasyTram控制的有轨电车位置、瞬时速度等信息输出到Vissim中同步显示,所以,该模块对于通信的实时性和效率有一定的要求。该模块也是EasyTram系统集成的核心之一。
2.1.2 有轨电车运行过程逻辑计算模块
为了体现有轨电车的车辆动力性能特征,本模块基于牵引计算理论来自动控制有轨电车的整个运行过程,但同时也将车辆信息、外部的信号控制、车站信息、道岔信息、有轨电车跟车信息等考虑到牵引力计算过程中,以体现有轨电车运行过程受道路交通设施影响的随机性。

图2 EasyTram系统的模块设计Fig. 2 EasyTram system module design
2.1.3 界面显示模块
显示功能可以实时根据当前仿真步长输出每个有轨电车的运行曲线(速度—距离曲线,速度—时间曲线等)以及有轨电车的状态(加减速、制动、跟车、自由行驶、遇到红绿灯等)。同时,还可以实时显示有轨电车线路中部分关键道岔的整个变化过程。输出功能可以输出仿真过程中所有有轨电车的全过程信息,包括实时的速度、位置、状态等。
2.1.4 与外部其他硬件通信的扩展模块
本模块主要是为了实现外部信号控制信号优先功能,支持外部的设备控制算法等控制Vissim中的信号显示以及 EasyTram中的有轨电车信号控制。通过对EasyTram中各个信号控制车道以及有轨电车信号控制的信号灯组与外部信号控制设备一一对应,同时根据外部信号控制算法的检测要求,在系统中设置虚拟的车辆检测信息以及有轨电车优先信号请求发送信息传送给外部信号控制器,经外部信号控制器计算完成并反馈得到信号控制方案后返回给 EasyTram系统,对仿真的社会车辆和有轨电车形成控制效果。
2.2 仿真系统功能
整合轨道交通系统仿真或道路交通系统仿真的能力,形成有轨电车自成体系的仿真功能。
2.2.1 基于牵引计算的列车运行控制
以牵引计算为理论基础,考虑有轨电车的车辆特性、乘客的舒适度、线路的坡度、限速等条件因素以及其他的约束(信号、道岔、车站、跟车等),有轨电车在道岔区域按照联锁的规则来控制,在区间按照闭塞的安全间隔距离来追踪,从而实现有轨电车的全过程运行控制。同时,将每个仿真步长的有轨电车控制结果同步实时显示在Vissim中。
2.2.2 基于运行图的运行过程实现
根据定义的车辆数、运行任务、时刻表、发车间隔、交路等要求,基于全日运行图来完成全线路运行仿真,可以生成每一列车每一班次运营任务的距离—速度曲线等数据信息,进行整体综合评估,并能直观展现影响有轨电车通过能力的瓶颈环节,输出定量指标。
2.2.3 信号控制策略的评价
当列车经过路口时,通过仿真有轨电车通过路口的具体情况来设计信号优先功能(采取绝对优先还是相对优先的方案),或者接入外部信号优先控制机的控制逻辑,可以在设计阶段对有轨电车在信号优先路口的反应时间、通行效率、检测器的埋设位置设计等进行优化,评价该信号控制方案的实际可行性[7-10]。Vissim中有轨电车信号优先仿真界面如图3所示。
2.2.4 线路通过能力计算及影响因素评价
仿真从有轨电车出段进入正线运行开始,直至整个运营过程结束。定量地评价有轨电车线路的折返能力、通过能力以及各个区间的运行时分等具体指标,找出影响线路通过能力的薄弱环节。

图3 Vissim中有轨电车信号优先仿真界面Fig. 3 VISSIM simulation interface for the tram signal priority

图4 有轨电车全过程运行曲线(距离—速度曲线和距离—加速度曲线)Fig. 4 Running curve of the whole tram process (distance-speed curve and distance-acceleration curve)
2.2.5 专题仿真
对线路上影响通过能力的瓶颈段进行专题仿真。如仿真有轨电车在折返区段的运行过程,充分体现有轨电车的动力特征以及折返区段的控制行为,评价某折返站的折返能力。开展针对有轨电车首末站、大小交路转换等场景的专题仿真。在开展列车运行过程微观仿真的基础上,系统可对有轨电车的能耗指标进行专题评估。
2.3 仿真系统的特色
从功能和应用场景上看,本文所设计的仿真系统相对于目前主流的道路交通仿真和轨道交通仿真系统来说具有以下5方面特色。
2.3.1 混合交通环境仿真模式
考虑了轨道交通和道路交通各自的交通特征,有轨电车列车有着确定的实时速度,特别是在独立路权的区间行驶时间稳定,可预测列车受到外部信号控制和道岔控制的影响。道路交通的车流特征具有较强的随机性,车辆对信号控制的反映存在差异性。对有轨电车和社会车辆在交叉口冲突点,需要进行时空上的分离。混合的交通环境能够反映不确定性的道路信号和交通条件对有轨电车的影响,同时也能反映有轨电车带来的道路信号控制系统的参数变化对各类社会交通的影响。本仿真系统集成了上述场景过程。
2.3.2 运行图与交叉口信号方案协调性分析
传统的轨道列车运行图不能反映道路信号控制带来的影响,本系统将仿真过程中有轨电车线路上相关的道路信号控制状态与有轨电车的运行图进行了整合,将仿真过程中的信号影响完整反映到运行图上,从而为有轨电车运行全过程的分析提供了较好的背景条件,如图5所示。
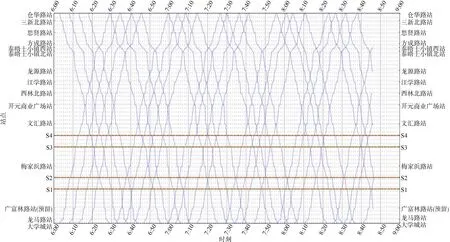
图5 混合环境下有轨电车运行图Fig. 5 Schedule for the tram running in a mixed environment
2.3.3 实现多交路及成网运行仿真
由于线路间交叉联系的道岔和折返过程的完整性,通过不同的有轨电车路径指派,本系统可以同时完整模拟有轨电车线路所有交路车辆的运行过程。除了常规的信号、道岔和车站的影响外,在轨道列车牵引力行为模型中加入了轨道列车跟车模型,可以模拟多列有轨电车并线运行以及在交叉口不同方向有轨电车的排队过程。
2.3.4 多评价指标的输出
系统能够详细记录有轨电车每个仿真步长的各种状态指标,同时将道路交通信号、道岔状态等全部记录下来,加上Vissim自身对道路交通系统的评价功能,可以根据不同需求对轨道专业、道路交通专业提供详细的评估指标(例如平均旅行速度、速度曲线、能耗、延误等)。
2.3.5 可扩展的接口
系统架构预留了硬件通信接口,能够将需要测试的相关硬件,例如轨旁设备、道岔、信号控制机、车辆等硬件参数化或实体化接入仿真环境,能轻松实现硬件在环或者车路通信等仿真功能。
3 案例应用
3.1 案例简介
下面以实际工程中某省会城市有轨电车项目一期包含3条交路的有轨电车线网为例,使用本系统进行仿真分析后得到结论。该案例包含2条有轨电车轨道,运行有3条交路,其中3号线与1号线、2号线分别有并线部分,各自共用一个折返站,1号线与2号线有交叉。线网拓扑关系如图6所示。

图6 案例的线网拓扑Fig. 6 Topological structure of the tram lines in the case
3.2 速度指标分析
基于12 h的仿真过程数据进行统计分析可见,网络上的车辆平均旅行速度在16~18 km/h。如图7所示,可以看出有轨电车在既有信号配时方案下的平均旅行速度分布区间较大,以1号线上行方向为例,最低旅行速度为16.8 km/h,最高旅行速度为20.1 km/h。

图7 固定配时条件下有轨电车仿真平均旅行速度Fig. 7 Average travel speed of the tram under fixed time conditions
即便在开通初期发车密度较低的条件下,由于线路并线运行,随机延误的累积也会带来轨道列车跟车的现象,加上信号交叉口延误,导致有轨电车运行速度不稳定,中间站的车辆到达间隔波动较大,降低了网络系统服务水平和运输能力。
3.3 信号方案评价
选取线路上连续的两个相邻交叉口进行信号控制方案改善,如图8所示。

图8 有轨电车信号控制案例Fig. 8 A case of tram signal control
这两个路口的有轨电车运行方向的进口道均设置了左转专用车道,信号控制方案采用常规四相位信号控制,如图9所示。

图9 有轨电车信号优先控制相位Fig. 9 Phase of the signal priority control for the tram
采取的有轨电车信号优先控制逻辑设置为:当系统检测到有轨电车进入或者位于交叉口检测范围时,如果当前相位阶段为第一相位阶段,则第一相位阶段绿灯时长持续到有轨电车离开交叉口并且达到最小绿灯时间,再切换到第二相位阶段;如果当前相位阶段为其他相位阶段,有轨电车不能通过,则在当前相位阶段绿灯时间达到或大于最小绿灯时间后切换进入下一相位阶段。当系统没有检测到或者系统内没有有轨电车时,每个相位阶段按各自最大绿灯时间进行切换[11]。
选取仿真过程中同一辆由西向东的有轨电车在通过分析的两个信号交叉口区段没有信号优先和有信号优先条件下车辆的距离—速度曲线,如图10所示,可以看到信号优先减少了有轨电车停车次数,降低能耗并提高了有轨电车行驶的平稳性和旅行速度。

图10 信号控制方案优化前后的速度曲线对比Fig. 10 Comparison among the velocity curves before and after signal control scheme optimization
3.4 折返能力分析
系统折返模型根据实际的有轨电车牵引力以及道岔转折时间和停站时间等条件进行计算,完整的折返过程如图11所示,仿真得到的有轨电车站后折返各作业流程时序如图12所示。仿真结果显示前后车的最小折返间隔时间是92 s,该站的折返能力最大是39对/h。
4 结语

图11 有轨电车站后折返示意Fig. 11 Turning back of the tram

图12 有轨电车站后折返各作业流程时序Fig. 12 The operation sequence of the tram turning back
综上所述,EasyTram是一个以轨道车辆动力学特征为基础的有轨电车运行仿真系统,建立了与道路交通仿真平台Vissim的互控关系,共同形成一种现代有轨电车一体化仿真系统。该系统能为有轨电车规划设计方案的全面评估提供量化支持。目前该系统已经在上海、浙江、湖北、四川等多个省市的有轨电车项目中得到应用。下一步将结合决策需求完善输出指标和展示界面,实现更加友好的决策支持。