面向空基信息系统的公共操作环境研究
2018-07-24吴永胜姜邵巍刘晓敏
吴永胜,姜邵巍,刘晓敏
(中国电子科学研究院,北京 100041)
0 引 言
空基信息系统[1]是以预警机为中心,协同干扰机、战斗机、无人机等多型空基装备,集成预警探测、情报侦察、指挥控制以及协同打击等功能,面向网络化作战,具备高动态、低时延的特点,公共操作环境是网络化作战能力的重要组成部分,是多平台协同能力构建的基础。
面向空基信息系统特点,公共操作环境应具备动态嵌入、高实时,与资源解耦合等特点,需采用开放式架构模型,解决应用之间紧耦合、软件与硬件紧绑定的问题,论文基于空基信息系统网络化作战活动分析了公共操作环境分层架构,阐述了分层架构的技术实施途径,并结合任务调度进行了功能组件的部署验证。
1 空基信息系统公共操作环境架构
通过对空基信息系统预警探测、情报侦察、指挥控制以及协同打击等网络化活动的梳理,分解为多类业务功能软件组成的功能线程在传感器、计算资源基础上并发执行,因此公共操作环境应在传感器、计算资源管理的基础上提供调度管理、传输服务、共用服务等功能,以满足多功能线程调度以及对应硬件资源、软件资源的运行约束要求,并在此基础上构建面向任务动态调度部署的系统架构,空基信息系统功能分层架构如图1所示。
面向多任务、多功能线程的并发需求,从系统抽取7类抽象模型元素,其模型由作战任务集(M,Missions)、功能单元集(F,Functions)、资源模块集(硬件、软件)、网络节点集(N,Nodes)、属性集(A,Attributes)、关联关系(R,Relations)、环境集(V,Environment)组成,构成空基信息系统组织结构模型,在此基础上确定任务、功能、资源的基础上确定各层节点实体、实体属性、交联关系及环境要求,分析各层信息交互关系与环境的变化,提出了一种面向任务的系统之系统(System of System, SOS)分层架构模型,将空基信息系统与平台任务系统架构同构化处理,统一划分为任务、功能与共用服务、传输服务和资源等层次,支撑按照任务实现硬件、软件等资源的动态调度,开展公共操作环境的分层设计,包括资源管理、传输服务和共用服务等三部分,如图2所示,系统具体分层描述如下:
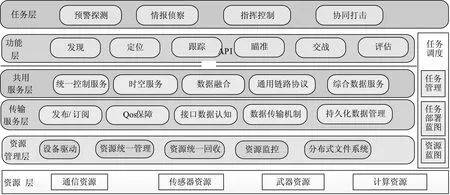
图2 分层模型研究
任务层:分析空基信息系统主要的作战任务,根据作战任务提出系统下一层对具体功能、业务、交互关系、交互信息的要求,提出单平台所需实现的功能以及其对外的信息交互内容;
功能层:从预警探测、情报侦察、指挥控制和协同打击等四方面分析系统的应用,提出功能应用组件的设计,以支撑应用组件的高内聚设计;
共用服务层:在功能应用设计的基础上抽取共用服务,将多功能应用具备的功能汇聚,采用发布订阅与远程调用混合机制构建了共用服务管理器,提升功能软件内聚设计;
传输服务层:通过远程过程调用、发布/订阅等机制的研究,提出满足应用组件需求的服务等级;通过有线/无线网络带宽的综合有效运用,提高系统的运行效率;同时提供应用组件管理功能,支持对应用组件的动态迁移部署,通过对应用组件运行所需资源、优先级等的分配,实现对应用组件的差异化控制,以支撑系统的高效率运行;数据服务通过对任务层、应用层输入的分解,梳理出空基信息系统相关信息的元数据与业务流,根据业务需求提出不同类型的数据结构、数据元素、数值范围和数据的组织方式,并研究以服务化的方式为各功能应用提供支撑,以达到系统设计的解耦合能力;
资源管理层:通过对空基信息系统的传感器资源和计算资源进行综合管理,传感器等外设资源采用系统建模、功能代理的方式构建管控能力,计算资源采用组件管理技术实施,以支撑系统高鲁棒、高效率的运行;
任务调度:通过对任务、状态、态势等信息的监控,以及任务执行与资源调度的匹配情况,进行系统功能再部署,从而支撑更有效地资源利用,提高系统的效能。
2 公共操作环境研究
公共操作环境提供在传感器、计算资源等空基信息系统资源的基础上资源管理、传输和共用服务,并具备面向任务实现功能软件动态部署的能力,针对空基高动态、低时延的特点,提供功能软件的访问处理时延要求在毫秒级。
2.1 资源管理技术研究
资源管理面向传感器资源类、计算资源类提供访问管理服务,其中传感器类构建代理服务,注册在公共操作环境中,通过服务接口实现对本地、远端传感器的调度;计算资源类通过封装功能运行单元,定义功能组件规范,涵盖资源需求、传输时延、运行约束等信息,构建标准运行实体,注册在公共操作环境中,通过管理接口实现在多计算平台上的部署。
2.1.1 传感器代理
针对雷达、电子侦察等异构传感器类系统进行同构化建模,梳理业务处理逻辑、处理时延约束,以及传感器的控制输入、探测输出等信息数据进行抽象处理,采取Agenet建模技术[3],分别将传感器等节点按照物理特征进行建模,采用软件服务化方法构建代理访问服务,提供针对其工作状态、工作状况、工作参数设置、工作模式设定以及特征信息上报等服务接口的统一管理,并根据传感器类型、平台节点构建符合其约束原则的访问逻辑控制,具体如图3所示。其代理服务类型包括雷达系统、电子侦察系统、敌我识别系统等,经同构化建模后,要素管理类型包括State_Contrl、Status_Monitor、Parameter_Ctrl、WorkMode_Ctrl和Traget_Info等信息。

图3 传感器代理示意图
2.1.2 计算资源管理
计算资源类管理通过功能组件的部署、迁移调度实现,其核心技术在于功能组件技术及调度管理。组件管理技术作为任务调度的技术实现基础,承担了功能组件注册、数据持久化、即插即用等功能,用以支持迁移和部署,组件管理平台的工作原理是基于ICE核心服务中的IceGrid服务,具体如图4所示。
组件管理设计的关键技术包括组件部署与组件迁移功能。组件部署与迁移服务的功能是在分布式计算系统的网络中将应用的各组件分发到指定的计算节点并执行,监视各节点的资源使用情况,通过迁移组件到资源空闲的节点,来实现整个分布式计算系统的负载均衡。该服务的基础设施包括一个注册表和多个节点,注册表和节点之间相互协作,以实现对组件的管理。系统完成某个功能由多个组件组成,这些组件一起被部署。注册表用来收集和存储应用部署描述,节点完成组件按照描述进行执行、停止、监视等操作。应用部署描述为应用中的每个组件指定一个运行节点,将其通知给注册表。为了提高容错性,注册表可以设置多个备份。部署描述可进行更新,注册表收到更新后,将其与原有部署进行比较,对差异进行更改,包括可能的组件在节点之间的迁移。
组件管理命令接口通过IceGrid服务中的定位器创建一个IceGrid管理事务,通过解析器解析管理命令类型。
·启动/停止/卸载命令直接通过远程方法调用方式调度组件
·加载/部署/迁移命令则先启动同步器,执行拷贝组件程序及数据文件至相应设备节点方法,根据实际情况追加或不追加启动命令,通过远程方法调用方式调度组件。

图4 组件管理服务核心机制
随着容器技术的发展,后续将推进基于容器的功能组件管理技术。
2.2 传输服务研究
面向解耦合的功能需求,传输服务需要提供运行位置无关的信息交互模式,改变传统面向连接的功能交互方式,设计了以数据为中心的组件交互方式,具备邻间发现机制以及传输Qos服务机制,满足多种场景下的应用需求,可根据任务的数据需求实现主动推送和拉取,实现空间解耦、时间解耦合控制流解耦,提供大容量通信、高可靠通信、低时延通信、历史可恢复通信以及无线环境下通信的能力。
数据为中心的通信模式在数据传输过程中包含两种角色:发布者和订阅者;其中发布者发布指定主题的数据,订阅者订阅指定主题的数据。数据的来源和目标通过主题的匹配在运行时动态确定。通过服务质量来指定具体的传输行为,序列化和解序列化被封装在数据传输层内部。
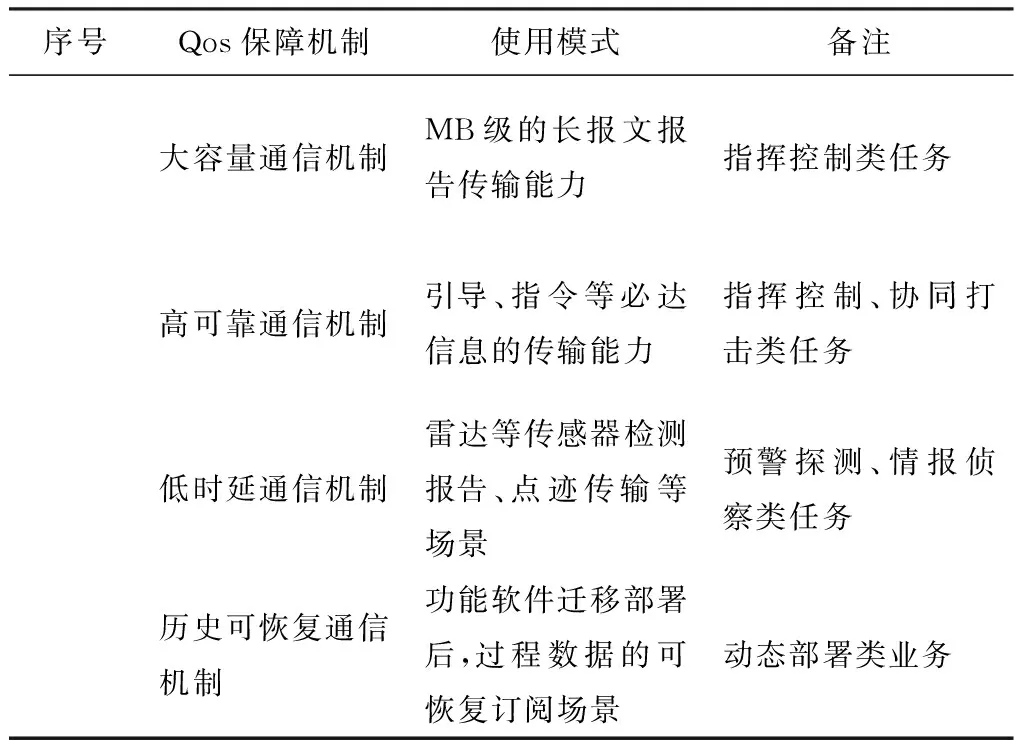
表1 服务保障机制及应用场景
针对传输服务功能开展了信息交互的测试验证(测试环境:3台国产计算机、千兆以太网),经与传统消息中间件比较,其性能有较大提升,具体见表2。

表2 传输性能测试数据(千兆以太网、可靠传输)
面向无线传输,提供遵循DDS协议标准的数据传输功能,将所传输数据及协议进行压缩,在IP化端机的支持下实现无线网络上数据的发布订阅传输,支持空基各节点的自由网络接入与退出。DDS协议报文在无线链路的应用处理如图5所示。

图5 DDS无线应用
2.3 共用服务管理
针对功能业务软件开展细化设计,将控制流、信息处理流分离,并按照功能内聚、无重叠的原则将多功能软件间的共用功能进行抽取,并将共用服务进行层化设计,部署于共用服务层,由层控制器为上层提供统一服务。
空基信息系统共用服务是将异构的多平台节点能够共用的信息内容抽象提炼封装成可供所有节点使用的服务,共用服务能够提供所有平台节点可用的基础应用,具体共用服务见表3所示。并具有松耦合性与位置透明性。松耦合性是共用服务提供的每一类服务之间都具有彼此独立的无依赖性;位置透明性是共用服务对所有客户端的调用者都是位置透明的,调用者只需要调用服务即可,而不需要知道服务的具体物理位置。
空基信息系统共用服务管理机制是基于面向服务架构[4,5](Service Oriented Architecture,SOA)而构建的,包括共用服务服务端,共用服务客户端以及共用服务管理器,如图6所示。机群信息环境共用服务的服务端将自身服务信息通过机群信息环境发布给服务管理器,由其分发给客户端,用于连接服务;具体的服务执行实体通过信息环境注册,客户端通过信息环境的远程过程调用技术手段调用服务,获得服务结果。
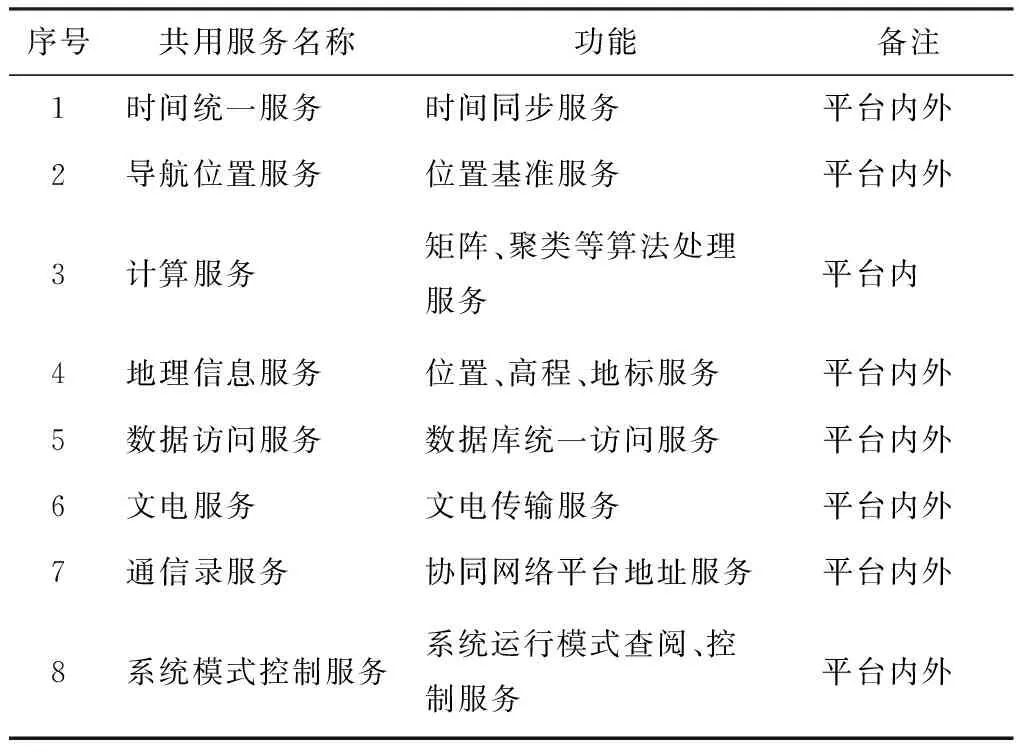
表3 共用服务类型

图6 服务管理机制
面向空基高动态性、低时延的特性,采用发布订阅、远程过程调用机制设计服务管理框架,针对自由文电的服务构建了运行示例并开展了测试工作,具体实施示例如下所示:
package FreeTMPackage;
service FreeTMService {
rpc FreeTMFunction (FreeTMRequestData) returns (FreeTMResponseData) {}
}
message FreeTMRequestData {
… // 数据字段
}
message FreeTMResponseData {
… // 数据字段
}
在国产计算机、千兆以太网环境下开展测试,具体测试数据见表4,由测试数据可知,服务响应时延在毫秒级,适用于空基强实时的任务调度管理要求。

表4 服务访问测试数据
3 任务调度研究
面向作战任务,由任务管理实现功能组件、共用服务、传感器资源、计算资源的统筹编排,构建出面向预警探测、情报侦察等业务的多类功能线程,针对功能组件、共用服务的资源需求、平台节点的资源约束以及资源映射规则,在满足处理时延要求的前提下开展任务调度部署,具体部署要求如图7所示。
针对预警探测业务过程的目标综合功能线程开展了功能组件的迁移部署验证,主要包括核心处理机箱(6个计算处理模块、2个电源模块与1个千兆交换模块,计算处理模块为FT1500A-16核),功能组件存储库,具体功能组件见表5所示。

图7 部署要求
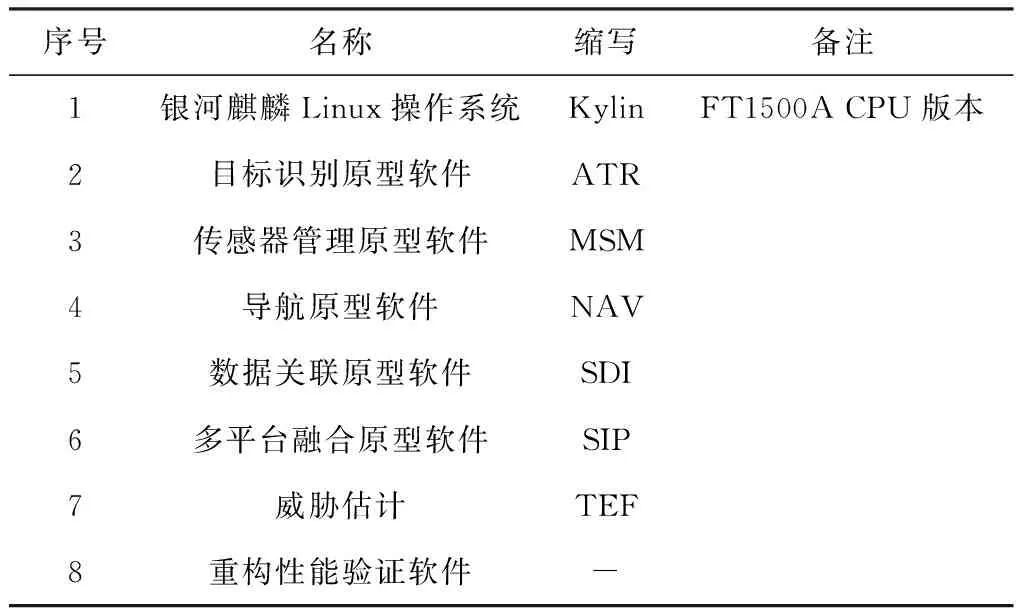
序号名称缩写备注1银河麒麟Linux操作系统KylinFT1500A CPU版本2目标识别原型软件ATR3传感器管理原型软件MSM4导航原型软件NAV5数据关联原型软件SDI6多平台融合原型软件SIP7威胁估计TEF8重构性能验证软件-
迁移部署基于组件管理服务实现,其主要机理为执行从组件库(功能组件存储库)中拷贝组件程序及数据文件至相应计算模块,追加启动组件命令,通过远程方法调用方式调度组件。组件部署运行示意图如图8所示,具体验证时间见表6所示。
均值容量大小为24 MB的组件,从资源管理配置项开始部署/迁移该组件起,通过组件管理从组件库拷贝至另一计算模块并启动运行为止,该段平均时耗为3.104 s。
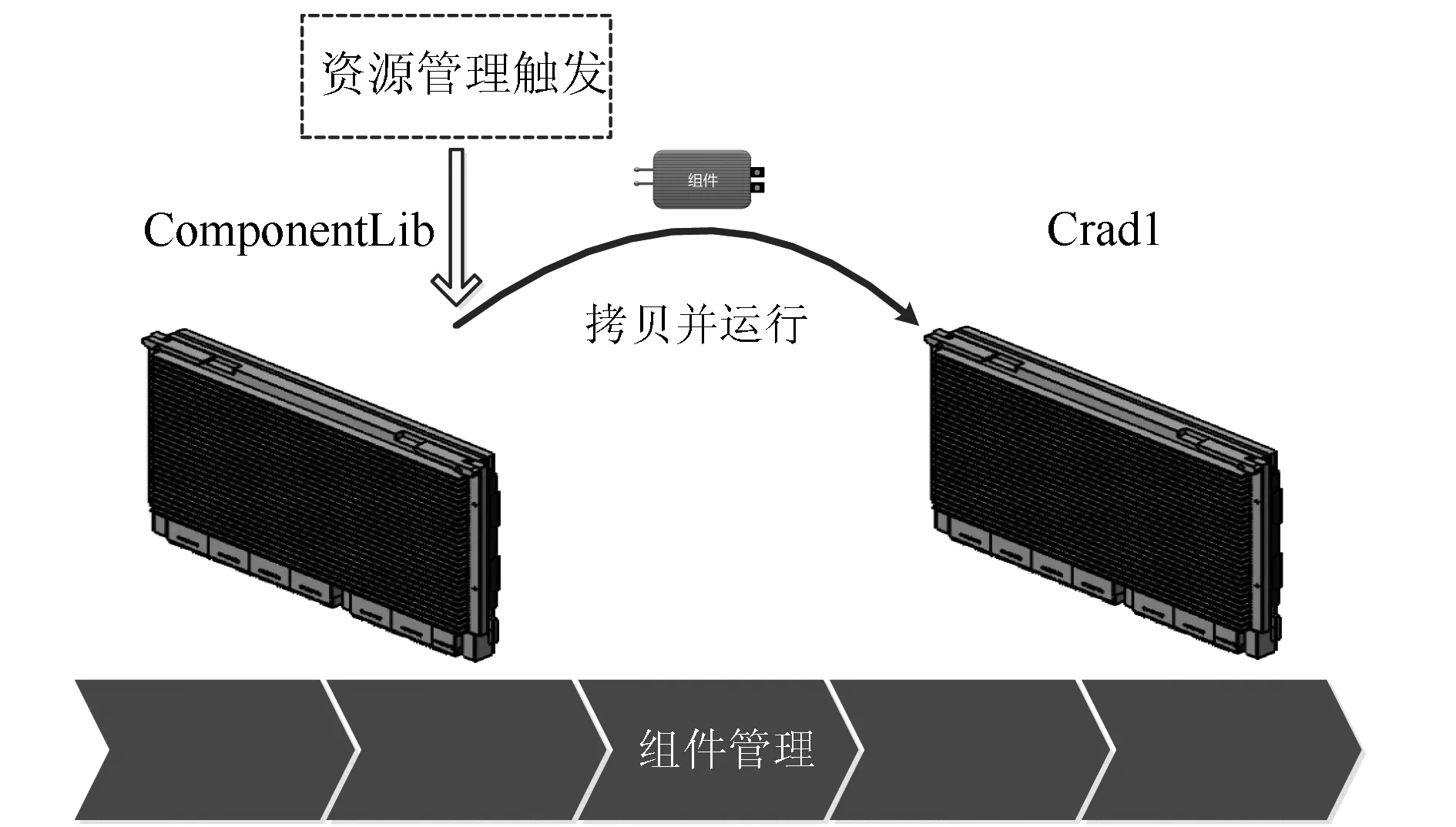
图8 组件重构运行示意图
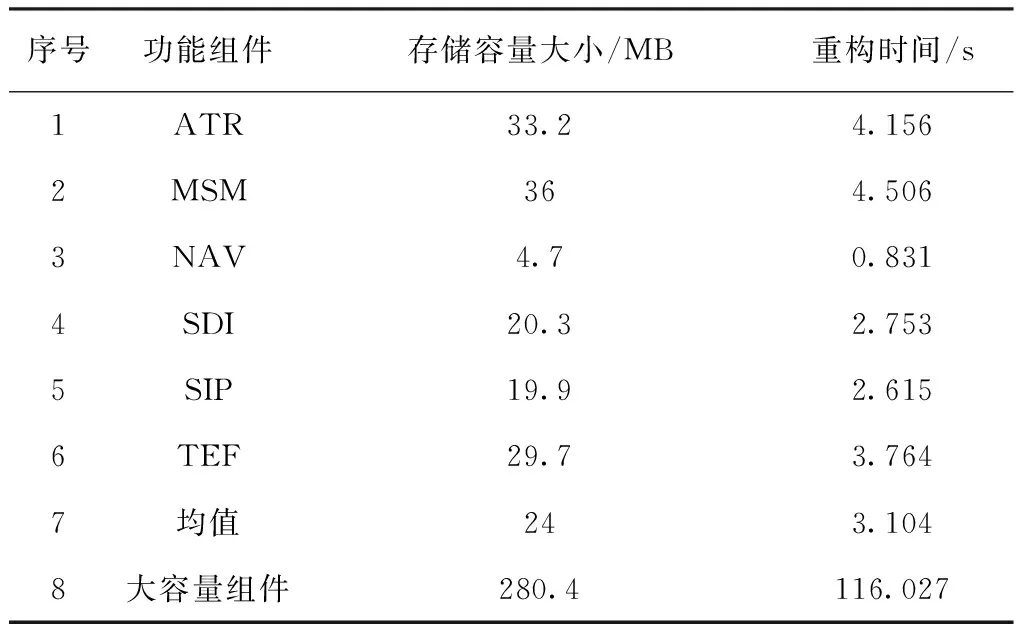
序号功能组件存储容量大小/MB重构时间/s1ATR33.24.1562MSM364.5063NAV4.70.8314SDI20.32.7535SIP19.92.6156TEF29.73.7647均值243.1048大容量组件280.4116.027
4 结 语
本文针对空基信息系统公共操作环境构建提出了系统分层架构,在架构的基础上提出了资源管理技术、传输服务、共用服务和任务调度方法等具体实
施途径并进行了实施和验证,通过对这些途径的应用实现了公共操作环境基础上的横向和纵向解耦合设计,可通过任务调度实现面向任务的资源再分配、功能再部署,提高了系统的效能。
