超大尺寸沉井不排水下沉及封底水下三维机械声呐应用研究
2018-07-23中国铁路上海局集团有限公司南京铁路枢纽工程建设指挥部
李 冰 中国铁路上海局集团有限公司南京铁路枢纽工程建设指挥部
魏湛力 中交二航局第四工程有限公司
水下工程的施工质量主要取决于施工期间的监测和水下测绘。水下工程完成后,水下结构将随着地形的变化而在一定程度上进行调整。利用水下工程检测技术,一方面可以在施工过程中发现问题,从而采取必要的维护和加固措施。避免因发生隐患或缺陷而发生恶性工程质量事故,确保工程施工质量;另一方面,可以对已完成的水下工程进行后期观测,以检测随着项目年龄增加可能发生的结构衰减甚至恶化,材料变质或水下结构老化。为建设方采取相应措施提供依据。
通过采用合理的水下检测方法或手段,技术人员能够准确把握实际情况,并采取措施。避免漏处理和不必要的处理。
本世纪初,水下工程检测技术得到很大发展,先后开发了一系列先进,高性能的水下检测设备。如水下电视,侧扫声纳,磁力计,浅剖面仪,按原理可分为光学,声学,磁力探测,水下机器人等技术。
随着沉箱基础向较大的平面和较深的方向迅速发展,大型沉箱呈现出与中小型沉箱不同的下沉和密封方法,首次将水下声纳成像扫描测绘技术应用到沉井下沉、封底施工中。
1 工程概况
五峰山长江特大桥北锚锭沉井基础长100.7 m、宽72.1 m、高56 m。沉井总计共分10节,第1节为钢壳混凝土沉井、高8 m,第2节至10节为钢筋混凝土沉井,其中第2节高6 m,第3节至8节高均为5 m,第9节高4 m,第10节高8 m。沉井封底混凝土厚为12 m。沉井顶面标高为+1.0 m,基底标高为-55.0 m,基底置于砂层中。
沉井采用矩形截面,标准壁厚2.0 m,隔墙厚1.3 m,中间共设置48个(10.2×10.9)m的矩形井孔。沉井构造见图1。
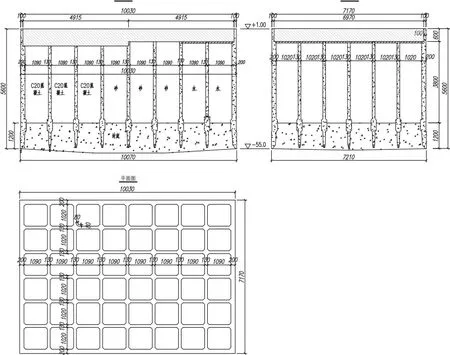
图1 北锚碇沉井构造图(单位cm)
2 常规方式测量泥面标高
2.1 测量方式介绍
沉井下沉过程中各拟定工况下对刃脚埋深及泥面标高有严格要求,首先需通过设备自身控制泥面状态,然后通过测量手段监控泥面状态。
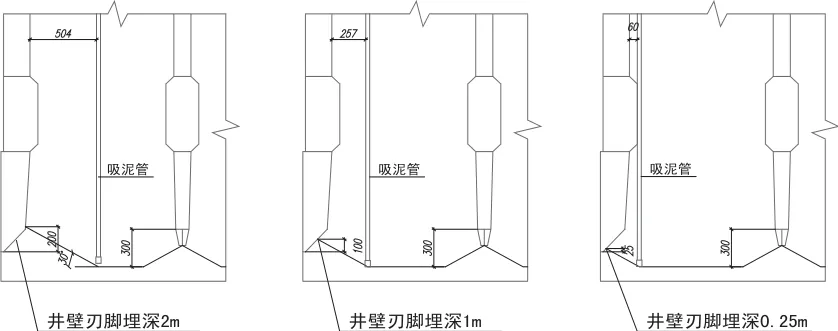
图2 直吸泥管刃脚埋深控制图示
(1)吸泥深度控制
空气吸泥管为无缝钢管,吸泥管的长度均一致,吊点设置均一致,梅根吸泥管均设置刻度标尺。龙门吊尺寸、大钩均一致。以沉井顶面平台为参照,可通过吸泥管下放深度来控制吸泥面,此过程由操作人员进行控制,现场技术人员进行旁站监控(见图2)。
(2)刃脚埋深控制
直吸泥管无法直接吸到刃脚土,需根据吸泥深度及锅底状态控制刃脚土埋深,在假定的吸泥深度下,通过控制吸泥管与井壁间距来调控泥面锅底形状,确保刃脚埋深。
弯头管在沉井终沉阶段使用,可直接吸到刃脚土,以吸孔刃脚土为目的,弯头管的走向需提前做好标识(见图3)。
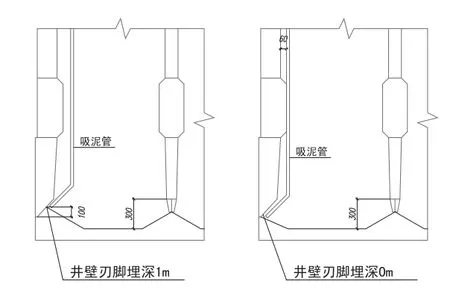
图3 弯头吸泥管刃脚埋深控制图示
(3)泥面标高监测
现场采用人工用测绳定时测量井壁及隔墙刃脚泥面标高,另外需保留支撑的隔墙及井壁位置处布置有土压力盒,根据土压力情况也可判断支撑情况。人工测量无法准确判断刃脚埋深情况,受沉井第二节剪力键的影响,测点的泥面标高比刃脚位置的泥面标高要低,以此数据代表刃脚埋深偏安全。每个井舱布置8个测点,共计384个点,监测频率为1次/6 h,并根据现场开挖功效做对应调整(见图4)。
传统测绳法采集数据工作量繁重,且测绳测量时只能测具有代表性的角点及壁面中点,在指导施工中基本都是以点代面,只能进行边角的粗略控制,如要测量沉井隔舱中间区域底面状态,需要用人工用吊篮连续打点测量;测绳法误差较大,无法判断沉井底面状态,不能达到精细化、可视化指导施工。设备自身控制标高,测点受限,难以全面检测泥面标高。水下声纳成像扫描测绘技术能有效解决传统方法的局限性,降低安全隐患。
2.2 水下声纳成像扫描测绘技术
三维图像声呐是一种通过静态机械扫描模式进行作业的高精度三维成像声学设备,该设备可以通过侧舷安装或者坐底两种方式进行作业,目前广泛应用于航道整治、桥梁桩基和大坝等水下检测中。代表性设备有Blue view 5000。对采集的数据采用专业软件Proscan、Cyclone、Autodesk Recap等进行拼图和除噪,最后得到三维点云立体图像,该监测方法误差在厘米级。
2.3 水下三维机械扫描声呐应用
(1)选择未施工沉井隔仓2,进场之前,确定现场施工情况。该隔仓内水深最深达到55 m~60 m之间,国内现有三维声呐数据线缆长度在40 m~45 m左右,需对现有数据线缆进行测试,确定其数据传输参数并接长硫化,在60 m水深范围内进行测试达到预期效果。其次,现场缺少声呐监测平台及升降设备,将工人吊篮改造成声呐监测工作平台,便于声呐下放和回收。将沉井塔吊作为升降设备,通过塔吊合理布置测点,规避附近井舱施工造成的影响和风险。若沉井隔仓2周围没有施工则井底滑坡掩埋设备风险较小可以采用坐底方式监测。若沉井周围有施工,针对井壁四周有活动平台的特点,采用三根绳索连接井壁并固定设备支架,将声呐设备倒放入水(见图5)。
(2)每天监测之前,依据现场施工安排,确认需监测沉井隔仓2,将监测平台及塔吊准备到位,准备4根70 m绳子(单根载重量40 kg以上),70 m以上电源线、空开插板、稳压器。连接三维声呐设备,将设备调试到位,确保正常工作。
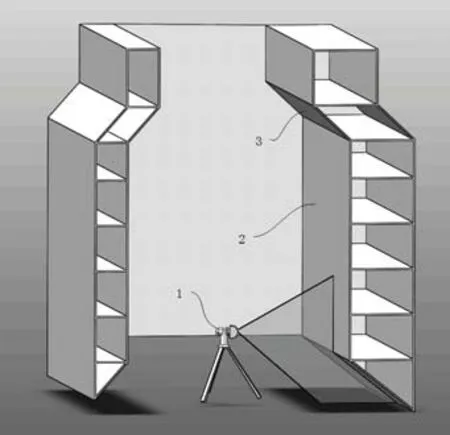
图6 球形扫测示意图
(3)采用坐底或倒放方式将三维机械扫描声呐1设备放入水下,发射频率为1.35 MHz,声速设置在1 470 m/s左右,声呐对隔仓内水下结构发射声呐信号。沉井隔仓2尺寸10 m×10 m,将信号范围设置在0.4 m~15 m之间。选择球形扫描模式,通过终端软件设置扫描速度,一般采取0.5°/s或1°/s,水平方向可扫描360°,竖直方向可设置四个角度分别为+45°、+15°、-15°、-45°。每次扫测固定竖直方向角度,水平方向旋转360°,扫测一圈所用时间为6 min或12 min。球形扫测示意图如图6所示。
(4)对采集的数据采用专业软件Proscan、Cyclone、
Autodesk Recap等进行拼图和除噪,最后得到三维点云立体图像,该监测方法误差在厘米级。该方法是现有公知技术,本领域技术人员均知晓具体如何操作,在此不再赘述。作为示例:采用Autodesk Recap软件,大致操作流程如下,首先打开Recap程序点击主页面中的“扫描项目”选项,在弹出的窗口中选择新建项目,选择需要导入的三维点云数据文件,文件格式后缀为XYZ,导入文件成功后,即可点击“启动项目”,进入数据后处理窗口;然后在后处理窗口中,通过“颜色模式”、“照明设置”、“点云设置”、“围栏”、“限制框”等功能对点云数据进行缩放、调色、旋转、除噪、剪切等,使点云数据干净合理便于观察和测量;最后完成数据处理后,将文件导出为PTS格式,将点云数据PTS后缀改为XYZ,用BLUEVIEW看图软件打开进行观察、测量、分析。
由于每个沉井隔仓2中剪力键3到刃脚的高度为8m,可以量取泥面到剪力键3的高度得出整个隔仓内部任意点的泥面高程。
沉井下沉底部吸泥工序中,该方法监测图及判断如下:
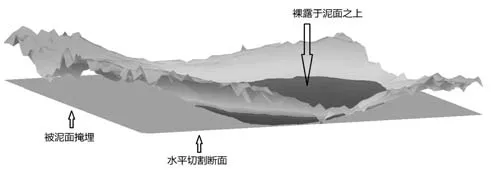
图7 三维点云立体图像断面典型示意图
如图7所示,从图中可以实时了解施工中各舱泥面分布,合理布置吸泥区,同时可以精确量取各泥面高度,判断刃脚和隔墙埋深。图7为立面状态下的三维点云立体图像,图中可以直观看到浅色区域的隔仓壁上存在一条深色的分界线,该分界线即为沉井隔仓2中剪力键3位置,即为该方法中所定义的特征高度;而放大观察隔仓壁图像和泥面图像,两者图像特征差异明显,也会存在一个明显的分界线,该分界线即为隔仓壁和泥面的交界线,在该交界线上取2点,并获得该2点到特征高度的距离5.642 m和6.149 m,即图8左部分存在一定的堆积,再将剪力键3到刃脚的高度分别减去这2个距离,即可得到这2点的刃脚埋深。同理,可以获得泥面任一点到特征高度的距离,从而根据这些数据的均匀程度判断泥面的分布和平整度,均匀也就也平整,反之则越不均匀就越不平整。
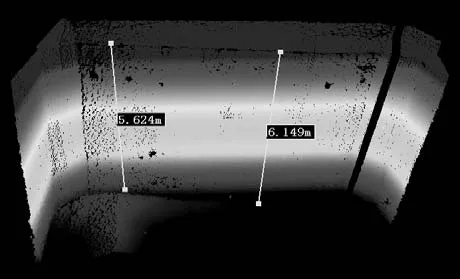
图8 隔舱刃脚泥面分布图及泥面高度测量
碎石找平层和水下封底混凝土施工工序中,监测方法及判断与泥面监测类似,同样可以获得碎石层面、混凝土面任一点到特征高度的距离,从而根据这些数据的均匀程度判断顶面的分布和平整度,越均匀也就越平整,反之越不均匀越不平整。
3 结束语
五峰长江特大桥北锚碇沉井不排水下沉、封底施工,首次采用了三维机械扫描声呐监测方法,克服了传统测绳法中的缺点,通过水下成像能够看到整个沉井隔仓底面及井壁的状态,可以判断刃脚埋深及悬空状态,碎石找平层及水下混凝土是否填充到位;采用该监测方法能够减少测量人员、减少数据采集的工作量、缩短数据采集时间、减小测量误差,可以精确化、可视化指导施工,能够全面的掌握沉井底面状态。尤其是在下沉困难或沉井入岩时,不再需要潜水员下水探摸,避免了由此带来的安全隐患。在施工间歇中进行水下监测,对施工中出现的问题进行迅速纠正和调整,避免出现安全和质量事故。本监测方法还具有检测精度高,速度快,操作简单,成本低等优点,能够精确化、可视化、科学化的指导施工,促进了沉井下沉水下监测技术的革新。此工程经验可为其他类似工程提供借鉴和参考。