电动汽车制动能量回收控制技术分析
2018-07-23汪文芳邹辉
汪文芳、邹辉
(江铃汽车股份有限公司 330200)
1 电动汽车再生制动原理研究
制动系统是电动车的重要组成部分,但在制动过程中,会使得电能以热能的方式散失,造成能源损耗。这些散失的能量可以占总驱动能量的50%。为实现对这些散失能量的回收,可借助制动能量回收系统(BERS),实现能量的回收,可以增加行驶里程10%~30%,具有良好的应用价值。
在具体应用中的原理为,制动时,将汽车行驶的惯性能量借助传动系统传递到电机,并使电机在这部分能量的基础上变为发电模式,将惯性能量转变为电能,再借助电力装置,将这部分回馈的电能存入到电能存储装置中,实现制动能的再生与回收。而且,电机所产生的制动力矩,可传递到驱动轮,达到增加制动力的目的,完成对一部分制动能量的回收,进而增加的续航里程[1]。
2 电动汽车制动能量回收控制技术分析
对几种电动汽车制动能量回收控制技术展开分析,旨意为具体的能量回收提供参考,详细内容如下。
2.1 理想的前后轮制动分配控制
这种制动控制技术,当减速度<0.1 g时,只在前轴上作用再生制动力,当减速>0.1 g时,则前后轴制动力随理想的前后制动力分配曲线变化。为了保障电动汽车减速时获取理想的减速度,前轴制动力仍遵循电机特征,由BERS单独产生或配合产生。如果减速所需力矩可以由BERS全部供给,则只选择BERS。如不能,则由BERS配合机械系统。
2.2 最佳制动能量回收控制策略
这种控制方式,是在确保可以获取理想的减速度基础上,只要前轮或后轮没有发生抱死现象,则尽可能对BERS进行运用,以期获取最大回收能力。在不同的道路环境中,可以分为如下2种情况。
①减速度小于地面附着系数,j/g<μ。这种情况下,如果满足Fbf+Fbr=mj,则前后制动力可以在一定范围内变动。其中,j为减速度,g为重力加速度,Fbf与Fbr分别为前后轮的制动力,m为车质量,μ为地面附着系数。
②当减速度要求j/g≥μ时,电动汽车能够获取最大的制动减速度,且被限制在μ的定值。为满足减速需求,控制制动距离,则制动力将被控制在理想制动力分配曲线和减速度与μ值的交点。这种情况下,BERS提供制动力可满足减速度需求,尽可能的利用BERS。反之,则由机械系统辅助。为实现最佳回收控制策略,则需辅助智能化的制动控制器,实现对各项数据的采集,这样则需要进一步优化与改进,会增加一定成本。
2.3 并行制动能量回收控制策略
这种控制方式,具备一个完成再生制动力与机械动力分配的结构,驱动轴的制动力由2者的动力和组成。分为3种情况,分别为j/g<0.1 g,则机械系统不工作,由制动电机工作。0.1 g<j/g<0.7 g,联合工作。如果j/g>0.7 g时,则仅依靠摩擦自动系统。为进一步对控制技术展开分析,对上述3种控制技术进行比较,具体如表1所示。
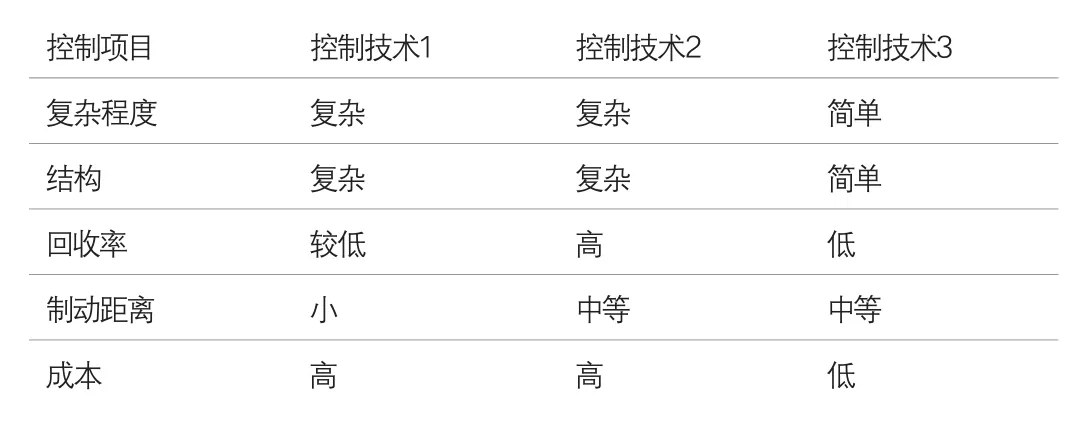
表1 3种控制策略对比
综合对各项技术比较后,说明第3种并行制动能量回收控制策略更加简单和理想,可以广泛使用,用于电动汽车的BERS中[2]。
3 结束语
本文对电动汽车制动能量回收控制技术展开分析,先对具体的BERS进行分析,研究BERS的具体回收控制技术,对比所选取的3种控制技术,结果说明,并行制动能量回收控制技术更为简单和理想,符合实际电动车的需求,能达到续航的目的,且降低技术成本。