基于光伏发电技术的水上清理机器人动力系统设计*
2018-07-23王莎莎荆世翔许环涛
孙 强,王莎莎,荆世翔,许环涛
(1.天津农学院 工程技术学院,天津 300384;2.北京新能源汽车股份有限公司,北京 100176)
由于环保意识的不足和道德感的不强,随手乱扔垃圾的行为造成水域的大肆污染,水体发臭,河水堵塞,部分地区的旅游效益日益降低。因此,加强对水资源结构和水环境的保护,可以更好地给广大人民提供更高层次的精神休闲和旅游需求[1]。虽然国内外已经开发出比较先进的水面垃圾清理装置,但是体积较大,结构复杂且难以携带,不利于面积较小且形式多变的河道和景区水域的垃圾清理[2]。本文主要介绍对一些景区水域和形式多变的河道的垃圾清理,最后提出一种水上垃圾清理机器人动力总成系统的架构设计。
1 总体布局
水上垃圾清理装置,其摄像头装于船体的最前方,便于监测船体前方的水路情况;核心控制系统单片机放于船身内部,机械臂在船身中部,便于抓取以船为中心一个圆内的垃圾;电机位于船后部,为整个装置提供动力;船的最后是垃圾收集装置,不会增加整个装置的空间,同时便于垃圾收集和清理。
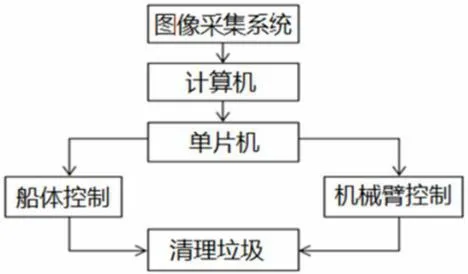
图1 系统整体控制框图
2 系统硬件总体设计
2.1 控制流程
当摄像头拍摄到垃圾时,将画面传送到相连的计算机或手机上,便可以手柄直接控制或者计算机通过蓝牙控制船行进到垃圾周围停止,远程控制船上的机械臂进行垃圾抓取行动,将垃圾抓取上后放置在船身后方的收集装置中。收集装置满后,控制装置回到岸边,将收集的垃圾清理,即完成操作。系统整体控制流程如图1所示。
2.2 主控单元
水上垃圾清理机器人是将STM32单片机为核心,它是一款高性能、低成本、低耗能的嵌入式控制系统,内核采用的是ARM32位Cortex-M3CPU,最高频率可以达到72 MHz,存储器采用6-64 kB的SRAM存储器,具有3个12位µs级的A/D转换器,最多高达112位的快速I/O端口,是集蓝牙控制和无线控制于一体的单片机控制系统。
2.3 动力系统
为了实现环保、节能、高效的水上垃圾清理装置设计,水上垃圾清理机器人采用磷酸铁锂电池作为动力源,同时配置光伏电池板收集太阳能。锂电池具有以下功能:①为船体的电机提供动力,能够实现船体在水上的前进及转向;②为机械臂抓取垃圾提供动力。
2.4 垃圾清理系统
垃圾清理系统主要由机械臂和垃圾收集装置组成。垃圾收集装置采用硬塑料,在减轻质量的同时也防止腐蚀;机械臂是由舵机和抓取爪两部分组成,舵机可以实现360°旋转,在图像采集反馈发现垃圾时,能够实现各个方位的抓取垃圾,不需要进一步调试船体的方位。
3 系统的软件设计
电机的控制是通过电机驱动模块L298实现的,是提供动力的部分,电机驱动模块的主要功能是驱动电机转动,使船体移动。船体的移动要求电机驱动系统不但具有高转矩重量比、宽调速范围、高可靠性,而且电机转矩-转速特性受电源功率影响,驱动模块L298能很好地解决这个问题。
通过脉宽调制来控制电机的电压,从而实现电机转速的控制。当开关管的驱动信号为高电平时,开关管导通,电机电枢两端有电压U.t1秒时,驱动信号为低电平,开关管截止,电机两端电压为0;t2秒后,开关管导通,重复以上动作。图2为PWM调制波形图。

图2 PWM调制波形图
在电源U不变的情况下,输出电压的平均值取决于占空比D的大小,改变D值也就改变了电压的平均值,从而达到控制和改变电机转速的目的。
4 功能实现
摄像头安装于船体的最前方,并与手机或者电脑相连接,实时检测船体前方的情况,船体既可以通过手柄直接控制,同时也可以通过计算机控制船体的行进和转向。在发现垃圾时,控制舵机和抓取爪来抓取水上垃圾,放于船体身后的垃圾清理装置中,在收集装置满后将垃圾带回岸边。
5 结论
本设计是基于STM32单片机的控制系统装置,是集图像采集、船体控制以及机械臂控制于一体的水上垃圾控制装置,具有高效环保、远程控制、控制方便等优点,可以在狭小水域及形式多变的河流实现垃圾清理,区别于人工打捞,在一定程度上实现了高效打捞。
