基于RTK技术的波浪浮标系统设计与测波研究
2018-07-21韩秀田王收军陈汉宝
韩秀田,王收军,陈汉宝
(1.天津理工大学 机械工程学院 天津市先进机电系统与智能控制重点实验室,天津 300384;2.交通部水运工程科学研究所,天津 300457)
0 引言
目前,波浪浮标因不受水深的限制使其成为海上测波的常用测量仪器,同时是从事现场观测是最主要也是最直接的方法之一。通过波浪浮标的三维运动,计算获得波浪的波高、周期等水文信息[1,2]。
北斗卫星系统覆盖范围已扩大到亚太地区,可全天候应用于导航、测量等领域提供高精度三维位置、三维速度及时间信息[3]。近年来,RTK技术定位和测速凭借其高精度、实时性、廉价及数据安全保密等特点得到广泛的应用[4,5]。
传统海上波浪测量仪搭载着倾角计量仪与加速度计测水粒子的运动,当浮标体随波浪上下运动时,测量仪搭载的加速度计与倾角仪测得之垂直加速度及东西及南北向倾度可以推求出波浪参数与波谱;但是传统安装在浮标内量测水粒子运动所使用的加速度计与倾角计虽然解析精度高,但价格昂贵,不便于大范围内波浪监测,与科技的普及与快速发展不相适应[6,7]。本文主要通过利用北斗导航系统和RTK差分定位技术,开发适用于近海的水位和波浪观测新型设备,实现近岸区域水位、波浪的实时监测。通过试验室物理模型现场实验对该设备的测量可行性、适用性以及准确性进行验证。
1 RTK技术波浪浮标系统总体设计
1.1 硬件系统构成
基于RTK技术北斗卫星定位的波浪浮标测波系统主要由基准站和流动站两部分组成。基准站与流动站主要由硬件电路板、P307定位板卡和电台通信三部分模块组成。其硬件系统结构如图1所示,其中硬件电路板由电源和控制系统组成。
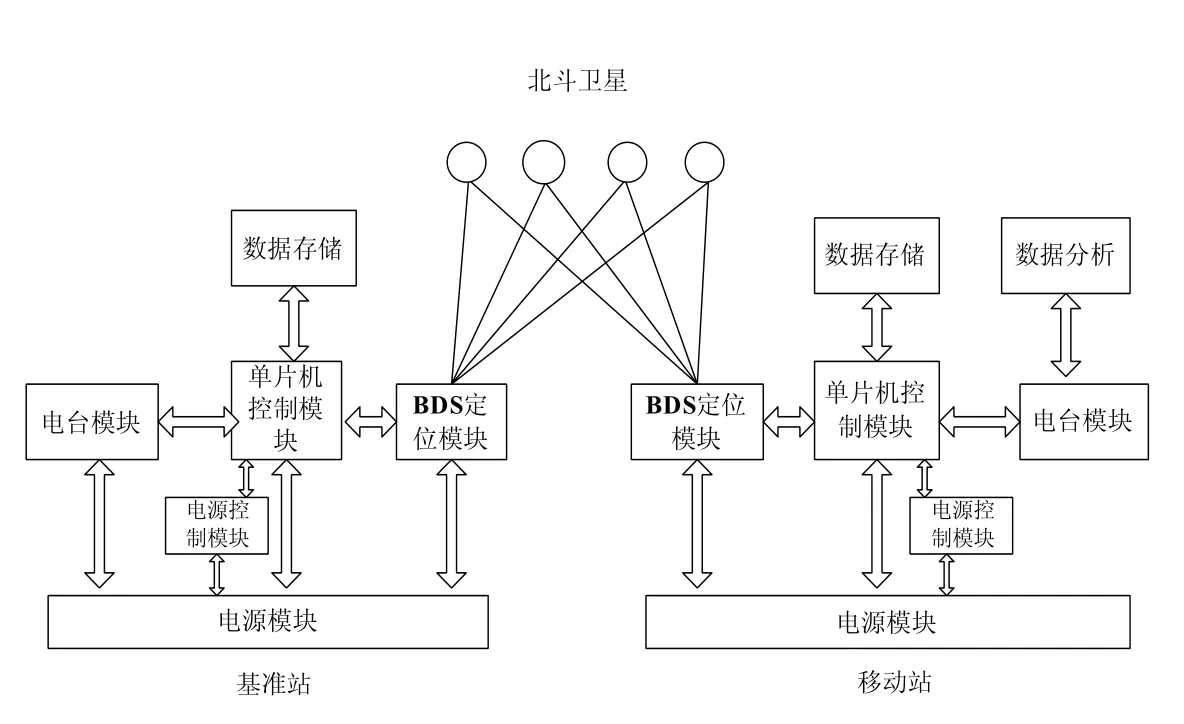
图1 基于RTK技术的BDS波浪浮标系统
基准站主要包括单片机控制模块、数据存储模块、电台远程通信链路模块、数据采集与分析处理模块。移动站主要包括单片机控制模块、数据采集和数据通信链路与处理模块。相对独立的基准站和移动站通过电台使之数据互通工作,硬件电路按照预定的采样时间间隔通过电源控制接口打开基准站和移动站电源。基站采集到的载波信息和观测数据实时存储至SD卡并实时传输给移动站,移动站将本站采集的载波信号和观测数据与基站传输的载波信号和数据进行差分处理进而实时得到移动站高精度定位坐标并存储至SD卡;移动站再将实时获得移动站高精度垂直位移通过电台模块以消息的形式发送至岸站接收系统。
1.2 硬件电路设计
为了实现波浪浮标数据存储、信号稳定传输及各相连模块有效正常工作,该硬件电路由系统复位、数据存储SD卡、外部时钟、RS232串行通信、电源控制、RTK定位板卡外围电路和电台链路等模块电路组成,设计框如图2所示。
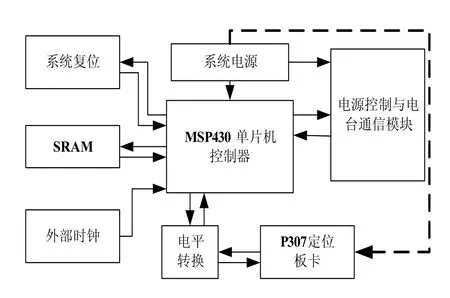
图2 硬件电路设计图
MSP430单片机是整个系统的核心,其控制着整个系统模块的正常运行,系统电源为单片机控制器、外部RTK定位板卡及电台通信模块提供电源;SD卡用来存储浮标原始三维定位数据;外部时钟为单片机MSP430控制器提供RTC和系统时钟;系统复位用于系统工作异常时系统强制产生复位信号;RS232串口电平转换实现MSP430控制器与设备的外围设备的正常通信。
硬件外围电路元件及电路板的核心控制芯片均采用工业标准器件且通过实验验证整个系统可在温度-10℃~45℃范围内正常工作运行。
1.3 RTK差分技术浮标测量原理
RTK差分定位也称相对定位,采用多个接收机,其中一个接收机的三维位置已知(基准站),其他的一台或多台接收机为待测点(移动站),测量原理如图3所示;移动站与基准站工作时必须同步接收至少4颗以上同组卫星,同时采集北斗卫星定位(BDS)观测数据;基准站为其他的待测站提供差分改正数据,移动站利用基准站的差分改正数据和本站观测到的数据进行解算,可实时得出待测站移动站的三维定位坐标、高程值及实测精度[8]。
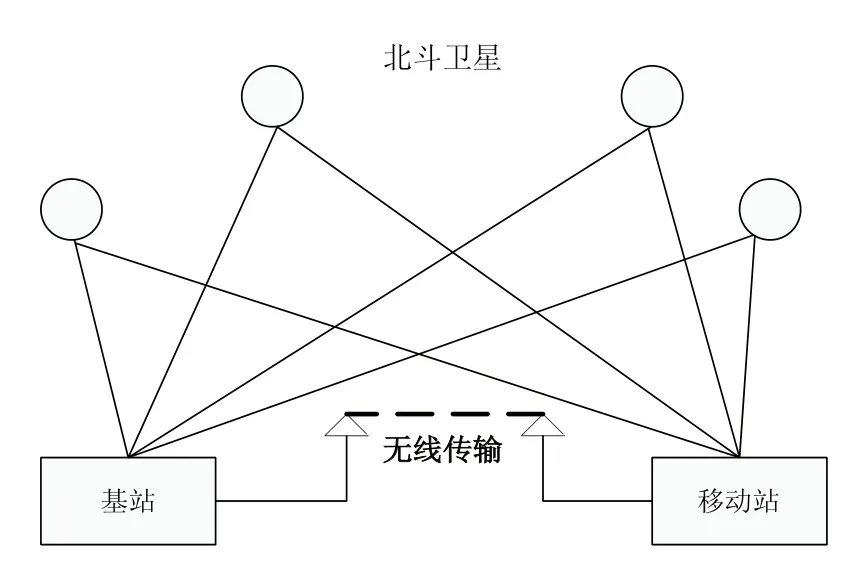
图3 RTK技术浮标测量原理图
系统利用RTK 差分技术精确测量波浪浮标随水质瞬时垂直位移的变化,利用垂直位移瞬时的变化值提取出波浪的信息;因波浪浮标应用于海上测波,因此测得的瞬时高程数据包含潮汐与波高数据;所测得的潮汐与波浪的周期相差甚远,海面高程数据可通过低通滤波和带通滤波得到波浪的信息;该系统初期在小比尺波浪水槽中进行对系统测波的精度及工作的稳定性进行验证,可乎略潮汐的影响。
1.4 数据采集流程
本系统要求基准站与移动站分别进行定位数据采集,同时基准站与移动站通过电台完成数据实时互通;因此保证基准站与移动站数据采集的时间相一致。基准站与移动站合为一体化。虽然基准站与移动站的程序存在差异,但两者的程序作为一个整体相互影响且同时进行。
通过串口中断程序实现对数据采集程序的运行,通过分钟中断程序内到达规定的时间节点相应嵌套的串口中断程序。基准站与移动站每次上电之前必须进行统一矫正时钟,上电后按照程序还要进行初始化。系统工作过程如图4所示;系统上电之后基站与移动站须各自进行初始化,然后P307定位板卡进行上电搜星,间隔3min后电台上电,电台上电之后经过3min基站与移动站进行数据采集;基站监测定位数据后,设置2秒一次通过基站的电台传输给移动站基线向量数据,同时移动站监测到有效数据并命令其电台接收基站发送的基线向量数据;移动站RTK板卡内进行基线向量解算得到高精度差分数据,移动站将差分数据通过电台每4秒一次向基站电台发送数据,基站收到数据进行保存,然后全部下电。

图4 数据采集流程图
2 波浪浮标的波高与周期统计方法
假设海浪的水面波动是平稳正态过程并且具有各态历经性,那么时间和空间统计性质是相一致的[9]。海浪的波面η可由无限多个不同频率、振幅、相位及入射波向的余弦波叠加而成,如式:

式(1)中;η(x,y,t)为波形函数;函数与时间及位置相关;ωi为成份波源频率;θj为入射波的波向,κi为对应于ωi的波数;aij与ωij分别对应于波向的振幅及相位。
假如浮标完全跟随水质点运动,则浮标所观测得到的垂直波面位移为:

BDS RTK波浪测量可直接获取水面浮标体瞬时高程值,由式(2)可得出水质点的波面垂直位移。
上跨零点法是波浪统计的一般方法,利用其可计算求得波浪的波高和周期。式(3)为最大波高及周期,式(4)为平均波高和平均周期,式(5)为三分之一大波波高和周期,式(6)为十分之一大波波高和周期。

通过上式可以计算出海浪的高度、周期等各要素。
3 实验验证与数据分析
在交通部水运工程科学研究所小比尺波浪水槽中进行浮标测波实验,实验采样数据的频率为20Hz,验证RTK技术波浪浮标测波的准确性及系统的稳定性,特选取BG-1型号电阻式波高传感器做校准,电阻式传感器的测量分辨率大小主要受电路A/D转换器的影响,该电阻传感器理论上测量精度为1毫米。
通过RTK差分技术测得波浪浮标随时间变化的垂直位移序列,该测得的波面位移信号序列主要包含波浪信号及观测噪声信号。实验数据采用平滑滤波处理,因平滑滤波计算量小,处理数据运算快,能够最大限度的的保留浮标在波浪的波动物理过程。为了验证系统的稳定系和测波精确度,波浪浮标对小比尺波浪水槽造出多组规则波与不规则波进行测波,然后将得到的波浪浮标的实验数据采用上跨零点法处理计算。RTK差分技术波浪浮标不规则波高如图5所示;RTK差分技术波浪浮标规则波波高图如图6所示,电阻式传感器和波浪浮标关于不规则波高对比结果如图7所示;电阻式传感器和波浪浮标方式关于规则波高对比结果如图8所示。
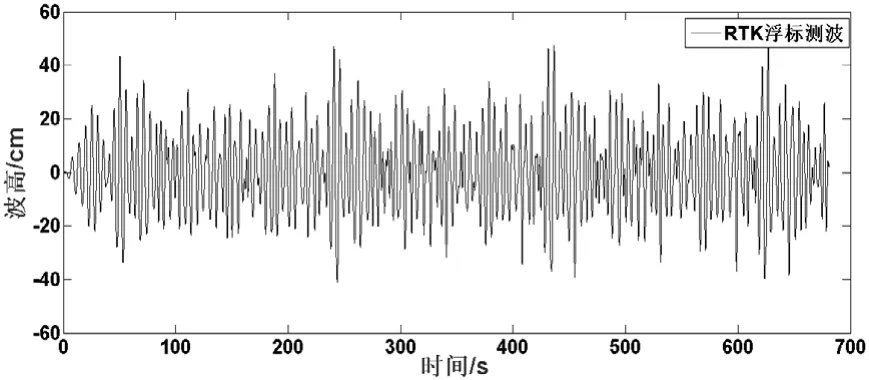
图5 RTK波浪浮标不规则波波高图

图6 RTK波浪浮标归规则波波高图

图7 电阻传感器与RTK浮标不规则波测波对比
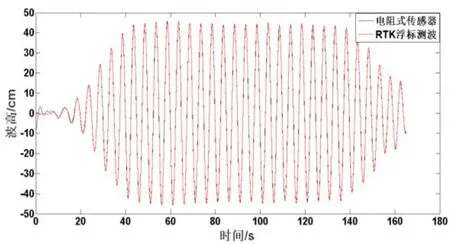
图8 电阻传感器与RTK浮标归则波测波对比
将浮标得到的波面一系列的垂直位移数据采用上跨零点法估计波浪浮标的波高、周期与电阻式波高传感器波高、周期结果对比,传感器和波浪浮标不规则波对比结果如表1所示,电阻式传感器和波浪浮标规则波对比结果如表2所示。
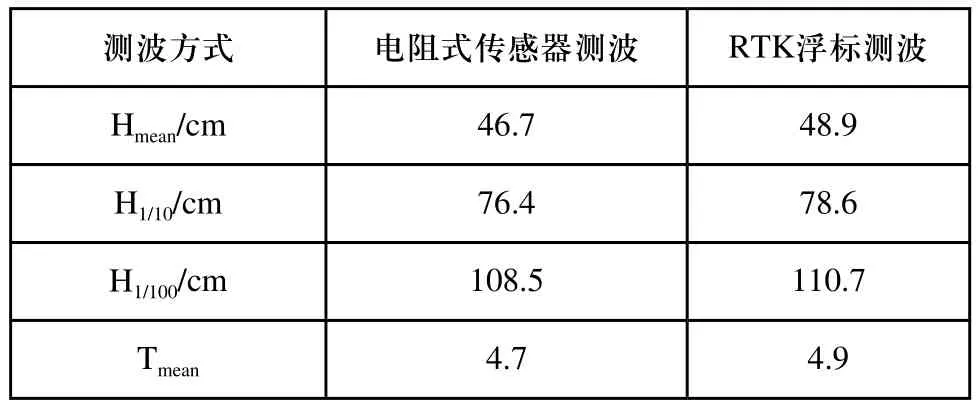
表1 电阻传感器和浮标不规则波数据对比
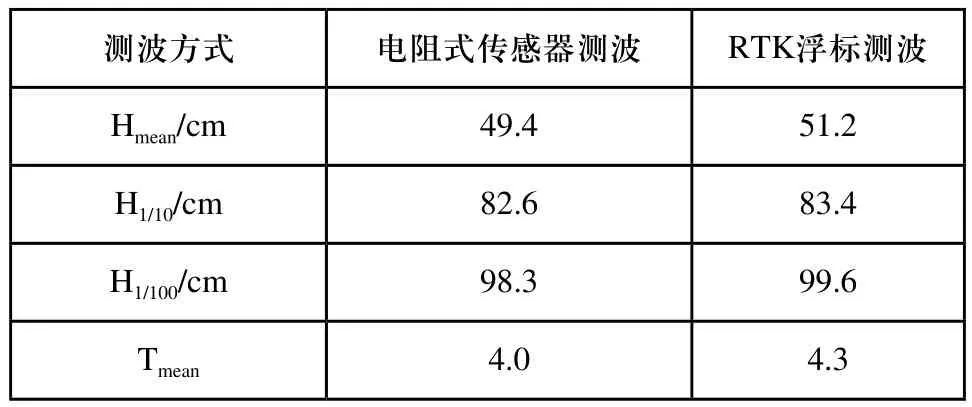
表2 电阻传感器和浮标规则波数据对比
通过曲线和表格数据结果对比表明,RTK浮标测波的数据与电阻式波高传感器测得有效波高数据存在一定的偏差,但整体显示RTK浮标测波的数据与电阻式波高传感器有效波高数据两者相关系数约为0.96;RTK浮标测得有效波周期稍微比电阻式传感器偏大,但两者相关系数仍约达为0.92,从而验证RTK浮标测波系统的准确性和稳定性。
4 结束语
本文对波浪浮标的整体系统设计和波浪的波高、周期统计方法进行了研究。首先,介绍了波浪浮标系统的总体设计,其包括浮标硬件系统的总体结构、基站与移动站硬件的电路设计、差分RTK技术浮标测波的原理和数据采集流程。其次介绍了波浪浮标测波的统计方法,包括波高、波周期等要素。最后通过实验验证了RTK技术浮标测波系统测波的稳定性及准确性,为下一步海上测波提供了理论和数据支持。