基于多普勒-随机共振技术的高精度阵形估计系统研究
2018-07-20王世闯王晓林庞玉红
王世闯,王晓林,庞玉红
基于多普勒-随机共振技术的高精度阵形估计系统研究
王世闯,王晓林,庞玉红
(杭州应用声学研究所,浙江杭州 310012)
潜用拖曳线列阵声呐在拖曳过程中,随着潜艇的运动状态变化,其线阵阵形会产生一定的畸变。速度越慢,其畸变幅度越大。阵形畸变,将影响声呐的探测性能。为有效提高拖曳声呐的探测能力,需对阵段不同拖曳状态进行阵形变化研究。基于以上研究需求的基础上,使用随机共振技术和阵元多普勒频移特性,在实验室或湖上构建了阵形估计系统,该系统可对不同拖曳状态的测试阵段实时地精确估计阵形,满足拖曳线列阵声呐阵形估计技术研究的需求。
随机共振;拖曳声呐;阵形估计;多普勒
0 引言
国际上潜用技术发展迅速,潜艇辐射噪声级正以每年平均1 dB量级下降,出现了一系列和海洋背景噪声水平相当的安静型潜艇。为使己方潜艇可在理想范围先敌发现目标,多国为己方潜艇装备了拖曳线列阵声呐。该型声呐具有声学孔径大、工作频率低、平台干扰小、工作深度可调等众多其他艇载声呐无法超越的特点,具备远程被动探测安静型潜艇能力。
目前,拖曳线列阵声呐探测目标时,以阵形保持直线为前提,为保证声呐探测性能,潜艇需尽可能保持稳定航行状态,这在一定程度上限制了潜艇的机动性。同时,为保证本艇自身隐蔽性,潜艇巡弋速度较低,而拖曳线列阵声呐在较低拖速下,容易呈蛇形运动,故为保证拖曳线列阵声呐在低速下的探测性能,需对不同拖曳状态下的线阵运动状态进行研究,以作为后续信号处理的补充。
目前,国际上对阵形研究的方法较多,但各种方法的估计效果无法直接得到验证。因此,需构建一套高精度的阵形估计系统作为衡量标准,为各种阵形估计技术的验证和发展做铺垫。
1 随机共振技术原理
随机共振(Stochastic Resonance,SR)为非线性双稳态系统,其势函数[1-2]表示为

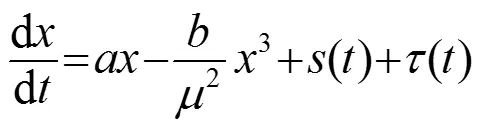

式中,为噪声能量。随着噪声能量的增加,其跃迁概率也相应提高,则质点可在两个势阱间相互跃迁,此时该系统则产生SR。
与其他技术相比,随机共振技术在检测微小频率弱信号方面,具有突出的优势。
2 运动阵元的多普勒频偏转换




多普勒频偏量为
WEB发布的流程包括:启用LabVIEW选项中远程前面板服务器,配置根目录、TCP/IP端口、使用记录文件、浏览器访问控制权等;再通过Web发布工具配置内嵌模式、网页说明内容、URL网址内容等,到此步完成内网发布步骤;通过netsh命令实现端口映射,使服务器上固定外网IP端口转接到内网IP指定端口,实现在任意电脑上输入用外网IP替换内网IP后的URL指定网址即可访问显示界面。


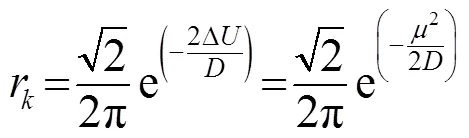
3 SR频偏信号检测
SR理论适用于频率很低(0~1 Hz)的信号的检测。对于高频率信号,由于两个势阱之间的转换频率低于信号高低电平变换的频率,无法产生SR现象。通过第1节的分析可知,频偏信号正在该范围内,可使用SR技术进行检测。
为了使SR方法可以检测频偏量,需将阵元接收信号进行调制,转变为频偏信号。
通过固定位置的换能器发射信号,拖线阵上的水听器在拖曳过程中对发射信号进行接收。
水听器阵元在时刻接收到的信号(含噪声)为


固定位置的换能器发射的原始信号为





由式(14)可知,调制后的噪声仍是高斯白噪声。
由式(10)可知,经过调制后的信号的频率成分变为两个,一个为原始信号的频率与扫频载波信号的差值,另一个为其和值。如果扫频载波信号的频率与原始信号频率差值非常小,就可以得到小参数的输入信号,然后经过滤波器,将其大频率信号滤除,获得频偏信号。将该信号通过非线性双稳态系统,输出便产生SR。具体实现过程如图1所示。

图1 SR检测频偏流程图
由图1可知,将拖线阵水听器接收的信号与固定位置的换能器发射的单频信号通过信号调制器进行调制;调制后的信号包含了调制后的低频信号、高频信号和调制噪声;其后通过低通滤波器进行滤波,滤掉高频信号后,仅剩低频信号和调制噪声;将低频信号和调制噪声通过非线性双稳态系统,则可形成SR现象,该系统的输出可精确地检测出频偏信号。
4 系统构建
根据SR的信号检测理论和多普勒频移理论,可构建阵形估计系统。
在有效测试空间内构建笛卡尔坐标系,如图2所示。
两轴构成平面B,两轴构成平面C,两轴构成平面A,三平面内各安装一个水声换能器,分别称为换能器A、B、C。如图3所示。



图2 测试空间笛卡尔坐标系

图3 测试空间换能器安装示意图


图4 SR阵形估计系统
5 仿真实验分析
根据拖曳平台运动状态,构建测试阵段各阵元在各时刻的接收数据,同时在各阵元单频信号基础上,增加噪声能量。通过调制,获得了多普勒频偏信号,如图6所示。

图5 拖曳平台运动轨迹
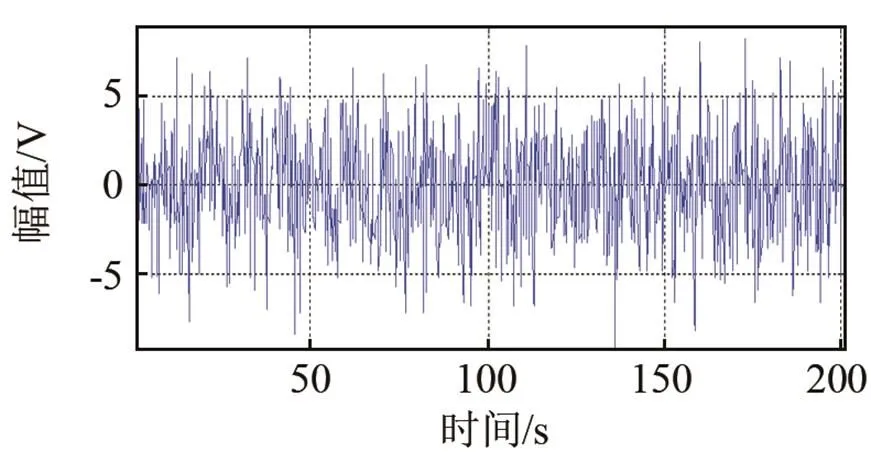
图6 经过150 Hz发射频率调制后的单阵元输入信号

图7 经过SR后的输出信号
由图6和图7可知,经过SR系统后,调制信号由杂乱无章状态变为有序上下的跃变状态。
对所得到的输入信号和输出信号进行频谱分析,结果分别如图8、9所示。

将构建的阵形与经过上述方法检测的阵形进行对比分析,求得不同时刻估计的各阵元位置与构建的阵形中对应阵元位置之间的距离,并计算该距离与阵长比值,将所有阵元计算的距离比值求平均,则获得估计阵形误差值,如图10所示。
经分析图10可得,估计的阵形与构建阵形的偏差值在6%以内,满足阵形估计的精度要求。

图8 调制信号频谱

图9 经过SR后的信号频谱

图10 阵形估计误差
6 结论
本文论述了SR信号检测理论、阵元运动多普勒频偏理论和多普勒频偏信号提取理论,并且根据以上理论,构造了SR高精度多普勒阵形估计系统。根据阵形运动特性,进行了理论分析与实验仿真,得出了该系统可以实时精确估计阵形的结论。因系统工程尚未构建,湖试或实验室试验不具备条件,尚未进行实际数据分析,后续将根据基础建设需求,对实际数据进行分析,以验证该系统的实用性和可靠性。
[1] 王世闯, 王茂法, 肖翔, 等. 拖曳线列阵机动时的一种目标检测算法研究[J]. 声学学报, 2014, 39(4): 441-451. WANG Shichuang, WANG Maofa, XIAO Xiang, et al. A target detection algorithm research during towed line array maneuvering [J]. Acta Acustica, 2014, 39(4): 441-451.
[2] 卢志恒, 林建恒, 胡岗. 随机共振问题Fokker-Planck方程的数值研究[J]. 物理学报, 1993, 42(10): 1556-1566. LU Zhiheng, LIN Jianheng, HU Gang. The Fokker-Planck equation’s numerical research about stochastic resonance[J]. Chinese Journal of Physics, 1993, 42(10): 1556-1566.
[3] 王茂法, 王世闯, 王晓林. 拖曳线列阵机动时的SRBF算法研究[C]//中国声学学会水声学分会2013年全国水声学学术会议论文集, 2013. WANG Maofa, WANG Shichuang, WANG Xiaolin. The SRBF algorithm research during towed line array maneuvering[C]// Underwater acoustics branch of china acoustics institute 2013 national hydroacoustics academic conference proceedings, 2013.
[4] 冷永刚. 基于Kramers逃逸速率的调参随机共振机理[J]. 物理学报, 2009, 58(8): 5196-5200.LENG Yonggang. The theory of stochastic resonancebased on Kramers’s escape velocity[J]. Chinese Journal of Physics, 2009, 58(8): 5196-5200.
[5] 王世闯, 王茂法, 肖翔, 等. 被动拖曳线列阵机动过程中的频域宽带波束形成[J]. 声学与电子工程, 2012(4): 5-9. WANG Shichuang, WANG Maofa, XIAO Xiang, et al. The broadband beamforming in frequency domain of passive towed line array maneuvering[J]. Acoustic and Electronic Engineering, 2012(4): 5-9.
[6] 王世闯. 被动拖曳线列阵机动时的信号处理研究[D]. 北京:中国舰船研究院, 2013.
WANG Shichuang. The research of signal processing during passive towed line array maneuvering[D]. Beijing: China Ship Research and Development Academy, 2013.
Research on precise array shape estimation system based on Doppler shift and stochastic resonance technique
WANG Shi-chuang, WANG Xiao-lin, PANG Yu-hong
(Hangzhou Applied Acoustics Research Institute, Hangzhou 310012, Zhejiang, China)
The array shape towed under water will generate a certain distortion if the movement of towing device changes. And, the slower the towing speed, the greater the distortion magnitude, obviously the distortion affects the detection performance. To improve the detection performance of the towed array, how the array shape changes in different towing states needs to be researched. This paper introduces the research results based on these demands, and proposes using the stochastic resonance (SR) technique and Doppler shift character to build a shape estimation system of towed array. This system can provide precise estimates of the array shape in real time to meet the needs of shape estimation technique for towed array sonar.
stochastic resonance (SR); towed array sonar; array shape estimation; Doppler shift
TB566
A
1000-3630(2018)-03-0222-05
10.16300/j.cnki.1000-3630.2018.03.005
2017-06-15;
2017-08-26
王世闯(1987-), 男, 辽宁丹东人, 满族, 工程师, 研究方向为水声工程。
王世闯, E-mail: wsc_715@163.com