基于拟合参数校正的室内位置推估方法
2018-07-16祝瑞辉甘兴利
祝瑞辉,甘兴利
(卫星导航系统与装备技术国家重点实验室,河北 石家庄 050081)
0 引言
近年来,随着各大室内场合位置服务需求迫切,室内定位技术成为研究的热点。文献[1-2]总结了国内外主流的室内定位技术及其定位原理,文献[3]研究了基于WIFI和移动智能手机的室内定位方法,文献[4-6]总结了基于射频识别的室内定位技术,文献[7]总结了基于超宽带的室内定位方法,文献[8-9]改进了基于到达信号强度和信号指纹的定位方法,为室内定位提供了思路,然而基于WiFi、射频或者超宽带的室内定位方法,需要预先在室内部署定位节点和设备,系统复杂且不具备自主定位能力。
MEMS惯性测量单元(Inertial Measurement Unit,IMU)因其低功耗、低成本、小型化和易集成的特点,成为室内行人导航的一种选择[10]。使用IMU中的加速度计传感器和陀螺仪传感器分别获取加速度信息和角速度信息,结合航迹推算算法实现位置估算。根据原理不同,可以分为根据惯性导航机制的连续积分定位和行人航位推算(PDR)定位[11],由于惯性连续积分定位对IMU硬件性能要求较高,实现困难且成本高,不适合应用在低成本、小型化的手持导航终端中。为此,文献[12-13]对行人运动姿态进行分析和统计,提出了PDR算法,以降低移动距离的计算难度。
陀螺仪传感器测向具有随时间发散的特点,电子罗经通过感知周边的磁场来测向,优点是没有方位误差累积,缺点是容易受周围环境干扰。本文针对陀螺仪测向误差累积和电子罗经受周围磁场干扰而出现偏差的问题,提出一种基于拟合参数校正的电子罗经、陀螺仪和加速度计室内位置推估方法。通过预先设置电磁容忍阀值,监视周围电磁环境,当小于阀值时,通过对先验信息拟合计算磁场偏角,校正磁阻传感器受电磁干扰引起偏差,进而使用电子罗经侧向结果校正陀螺仪,消除累积误差,当大于阀值时,磁阻传感器失效,陀螺仪与加速度计组合测向。
1 行人航迹推算原理
室内航迹推算是一种相对定位技术,通过采集加速度传感器、磁阻传感器和角速度传感器等信息,结合一定的航位推算算法,实时估算运动体的位置,参考文献[14-15],包括预设步长、步长估计、方向检测和位置估计4个步骤。基于加速度计和磁阻传感器个人航迹工作流程如图1所示。
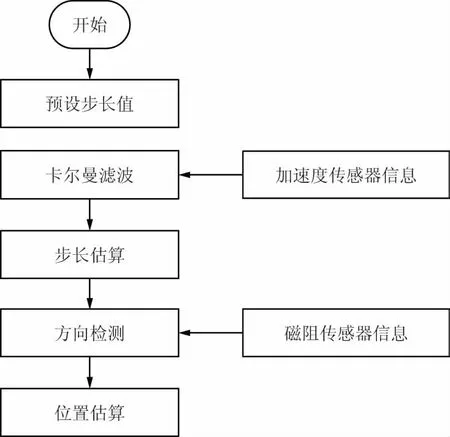
图1 基于加速度计和磁阻传感器个人航迹工作流程
使用加速度传感器采集的加速度信息与预设步长值结合来检测人员是否行走,检测行人行走步数,结合步长,计算行人连续行走距离。利用先验信息设置预设步长值作为步长值虽然简单但会存在一定误差,一种方法是当GPS位置数据可得时,这样GPS数据可用来改正校准距离和方向的计算,以补偿计算中的误差;另外,它可以重新计算步长和电子罗经偏移,这样可以减少一些连续的系统误差。另一方面,文献[16]采用具有稳定运算性能的线性模型,计算距离与真实距离之间的绝对误差值作为评价指标,并做了多组试验证明了该方法的可行性,步长校准模型为:
(1)

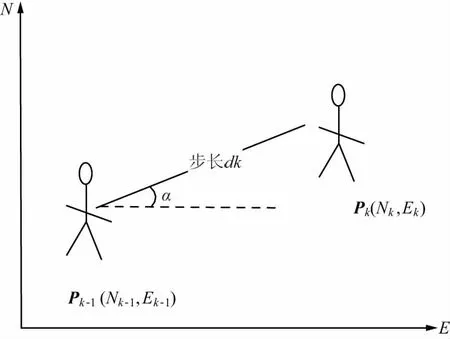
图2 人员航迹推算原理
坐标轴的Nk、Ek分别表示k时刻地理坐标系的北向位置和南向位置。设某一时刻行人处于Pk-1(Ek-1,Nk-1)处,行走方向与E轴夹角为α,行人第k步移动距离d后到达Pk(Ek,Nk),假设行人在行走一步内的方向是不发生改变的,则Pk(Ek,Nk)和Pk-1(Ek-1,Nk-1)之间的关系为:
(2)
Pk-1(Ek-1,Nk-1)表示行人在行走到第k-1步前的位置坐标信息;,dk是行人第k步的步长,运动方向与E轴夹角为α。
2 基于数据拟合修正的磁罗盘测向方法
测向是行人航迹推算导航算法使用的关键[16],磁罗盘因硬件条件或位置放置等原因不可避免地存在误差,但在基于陀螺仪姿态修正[17]和良好的电磁环境下采集数据,统计发现在某一区域范围内偏差数据接近线性分布。因此,采用分段线性拟合的方法能够极大地消除偏差,提高测向精度。
最小二乘线性数据拟合是处理弱非线性数据的常用方法[18],若数据分布统计接近线性,则可认为其拟合模型为y=kx+b。由于系统并非线性,故拟合后的数据与实测数据存在残差,可表示为:
(3)
式中,(xi,yi)为实测点。
为了使用求极值方法,式(3)修改为:
(4)
显然,式(4)是一个开口向上的曲线,SUM对k和b求导等于0,即可解算出k和b的值,求导有:
(5)
(6)
由式(5)和式(6)可得:
(7)
(8)
分段线性拟合是针对采样数据在某一段时间内呈一定斜率的线性变化,而在整个周期内斜率是变化的情况下使用。
3 试验结果与分析
当电子罗经可用时,首先使用电子罗经测向,并校正陀螺仪累计误差,当电子罗经受周围磁场干扰失效时,启用陀螺仪测向。试验场地选择具有桌椅、柱子和铁箱等较复杂的室内走廊场合。走廊呈东西走向,选择最西点作为起点,沿走廊南侧向正东方向稳步行走,加速度计和电子罗盘集成设备放置在后背腰处,当行走到走廊东顶点后折回,沿走廊北侧回到起点处。试验结果如下:
3.1 试验1:数据线性拟合前行人行走测试
人员行走测量轨迹如图3所示,当人员向稳步行走时,电子罗盘基于自身硬件和工艺以及周边磁场干扰原因,在北向出现较大的偏差,并随行走距离误差不断累积。
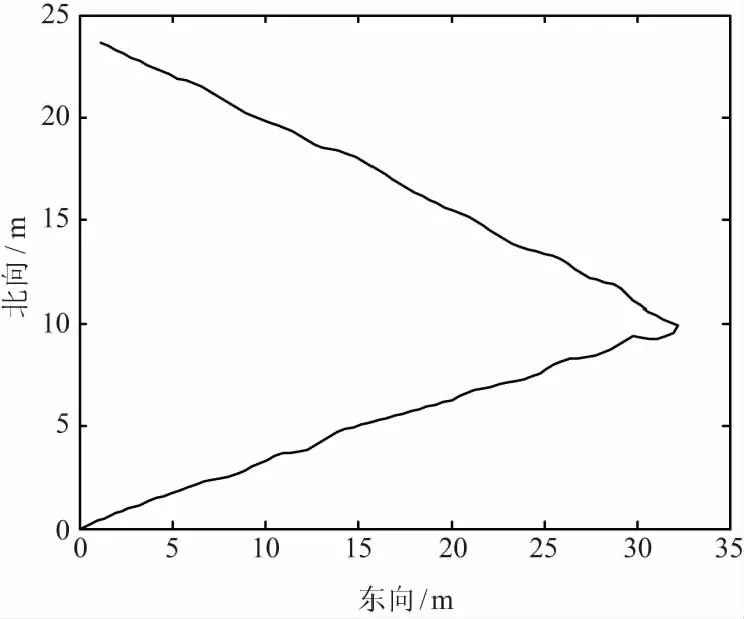
图3 人员行走测量轨迹
北向误差大致呈线性变化如图4所示。由图4可知,82步之前曲线斜率小于82步之后,即向东行走时北向误差累计速度略小于向西行走,这与南北侧磁场环境有关,也进一步说明分段拟合的必要性。
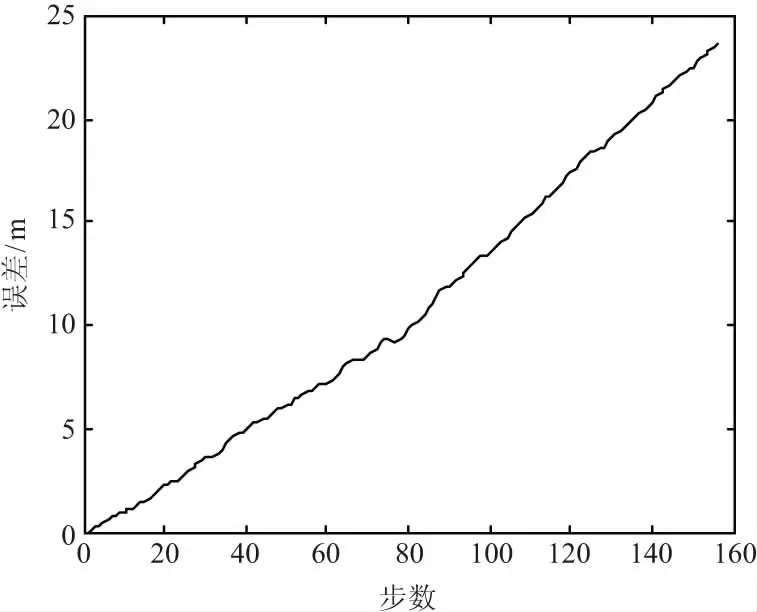
图4 北向偏差变化曲线
3.2 试验2:根据先验信息线性拟合后行人行走测试
线性拟合后的人员行走轨迹如图5所示,北向偏差变化曲线如图6所示。
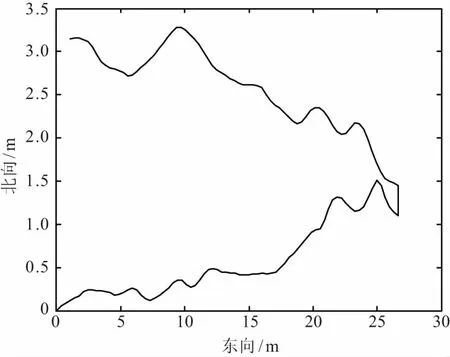
图5 线性拟合后的人员行走轨迹
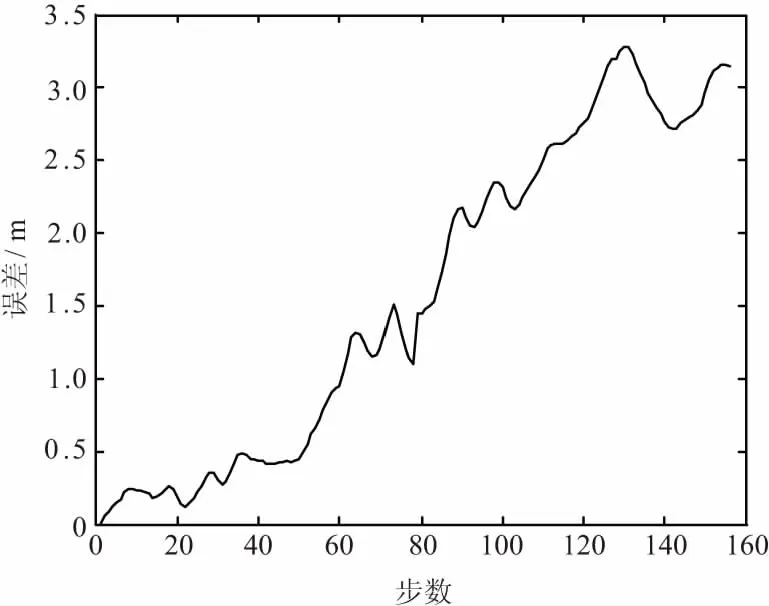
图6 北向偏差变化曲线
从图5和图6可以看出,通过先验信息,经线性拟合后,行走误差显著减小,精度提高。由于室内环境复杂,电子罗经受周围电磁环境干扰,间歇失效,MEMS陀螺仪本身存在随行走距离误差累计、初始对准误差等缺点,因子系统仍然存在误差,并随时间累积。
4 结束语
针对常规PDR系统中电子罗经因周边环境磁场干扰而产生偏差的问题,引入了线性拟合方法,通过在室内区域行走收集电子罗经侧向数据,与标定方向数据比较求得差值,再将差值经线性拟合方法拟合得到误差修正参数,以弥补电子罗经周边磁场环境干扰产生的误差。试验证明该方法具有一定的效果,虽然对于周边磁场环境复杂情况,经拟合修正后仍然会存在误差,但明显消除大部分测向误差。
