基于3D打印技术的人形机器人结构设计与控制研究
2018-07-14龚郡邓骞魏祥浩陈悦裴凯
龚郡 邓骞 魏祥浩 陈悦 裴凯
摘 要:本研究目的是通过CAD软件进行3D数字化设计,完成机器人结构仿生设计;并借助各种传感器在PC平台下进行编程,开发具有自主知识产权的人形机器人控制系统;实现3D打印人形机器人的自主研发和制造。因此,设计了基于3D打印技术的人形机器人创新实验平台。该平台由人形机器人本体和ROS机器人控制系统组成,其中机器人本体的机械结构采用3D打印技术制作而成,拥有25个自由度,具有成本低、便于批量制造的优点;硬件控制电路采用teeny3.1,具有扩展性强的优点,采用ROS机器人操作系统 ,能够完成远程控制,图像识别等功能。
关键词:3D打印;仿人形;智能交互
一、引言
21世纪以来,国内外对机器人技术的发展越来越重视,随着科技的进步,机器人技术的应用领域也在进一步扩大,机器人技术被认为是对未来新兴产业发展具有重要意义的高技术之一。目前科技界研究机器人沿着三个方向前进:让机器人具有更强的智能性和功能性,让机器人更具人形、微型化。虽然机器人发展火热,但机器人产品还存在推广上的障碍:开发周期较长、运营成本高、易受到干扰、实用性较差、实时性与精确性存在矛盾、功能单一、应变能力不足等问题。
仿人机器人是当今机器人领域最热门和前沿的研究方向之一,与传统机器人相比,仿人机器人动作更加灵活,具有更广阔的工作空间。不仅可以代替人类在危险复杂的环境中自主作业,还可以和人和谐相处,协助人类完成复雜动作,甚至在高科技战场上也会发挥重要作用。
同时,本项目的人形机器人模拟人手臂手指的动作和转向,实现物体的抓取,通过搭载相应的传感器完成语音识别与交互,机器视觉感知等功能。它是机械、材料、电子、控制技术以及人工智能等多个领域新技术的综合,其研究促进相关领域的发展;具有关节自由度多、耦合性强、阶数高、非完整约束的特点,是机器人控制理论以及运动学、动力学研究的理想实验平台。
二、设计方案
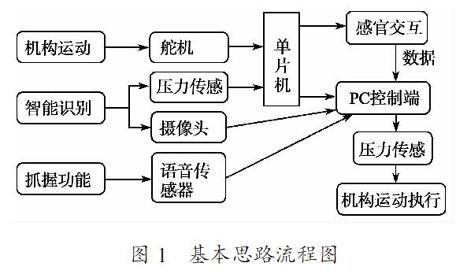
1.基本思路
2.机器人的机构设计
本作品结构按照模块化的设计,将人形机器人分成头、脖、肩、上臂、前臂、手、躯干、胃等机械结构部分,按照对称结构布局,利用仿生学原理,设计出大自由度灵巧手的人形机器人。由于打印机打印半径的限制,将部分结构分块设计,以适应打印机的大小。
头:仿生学外壳设计,包括天灵盖、后脑勺、眼、脸、上唇、下颚。其中下颚具有一个自由度,用舵机HK15298B控制,以模仿人说话的动作;整个头还具有另外两个模仿人点头和摇头的自由度,点头用4头大导程角蜗杆的反螺旋结构,摇头用一对圆柱齿轮实现。眼部用摄像头代替仿生眼球。
颈:与头部对接,并于前后布有齿轮和蜗杆传动机构,用于连接头部,并实现头部的上下和左右旋转以及张颌等动作。
肩:连接器通过螺栓与躯干转动连接,由电机带动反螺旋结构实现肩相对躯干的转动,蜗轮蜗杆结构实现连接板相对于连接器的转动。
上臂:第二个连接器承载着第二个蜗轮蜗杆,加上肩部的两个旋转自由度,合成为实际人体肩部的球面旋转副;中心处螺旋杆的反螺旋运动实现前臂绕上臂的转动。齿轮结构增强转动的稳定性。
前臂:内置电机基座,用于安装驱动5根手指的电机,上部用电机控制一对减速齿轮实现手腕的转动。连接器承载着第二个蜗轮蜗杆,加上肩部的两个旋转自由度,合成为实际人体肩部的球面旋转副;中心处螺旋杆的反螺旋运动实现前臂绕上臂的转动。齿轮结构增强转动的稳定性。
三、实验平台搭建以及结果分析
使用kinect感应器进行动态捕捉、影像辨识、麦克风输入、语音辨识以及压力和温度传感器采集数据,由PC端分析处理后,由单片机控制相应部位的舵机运转,从而实现各机构的运动以及智能交互。具有以下功能。
一是双目视觉的手势识别,在两个两个摄像头拍摄下,利用双目立体视觉成像原理,通过两个摄像机来提取包括三维位置在内的信息进行手势的综合分析判断,建立的是手部的立体运动模型。
二是基于ROS操作系统获取2个手掌、10个手指、40个关节端点的位置与姿态。它像操作系统一样提供应用于机器人上的各种功能,包括硬件抽象描述、底层程序管理、共用功能的执行、程序间的消息传递、程序发行包管理等。 从而实现软件的模块化和硬件的模块化。
三是基于可见光图像的人脸识别功能。摄像头采集含有人脸的图像或视频流,自动在图像中检测和跟踪人脸,进而对检测到的人脸进行脸部的一系列人像识别、面部识别。
四、结语
人形机器人拥有仿人形的外表,涉及计算机、电子、自动化、机械等诸多学科,且具有一定的趣味性,是绝佳的创新实验平台。本文提出的人形机器人创新实验平台设计方案利用3D打印技术“设计即生产”的优点,快速制作机器人的机械结构,具有移植性好的优点。采用本方案研制的3D打印机器人创新实验平台目前已应用于本校学科竞赛及“嵌入式软件开发”等课程的综合实训中。试用结果表明本方案研制的人形机器人创新实验平台激发了学生的创造力与学习热情,为开展大学生创新实验提供了有益思路。
该实验项目隶属于湖南省大学生研究性学习和创新性实验计划项目省级立项课题,并参加第十二届“挑战杯”湖南省大学生课外学术科技作品竞赛荣获三等奖。
(通信作者:邓骞)
参考文献:
[1]虞汉中,冯雪梅.人形机器人技术的发展与现状[D].武汉:武汉理工大学,2010.
[2]李航.机器人的研究现状及其发展趋势[D].成都:西华大学,2013.
[3]郭继周.我国3D打印技术发展现状及环境分析[J].国防科技,2015(6).
基金项目:湖南省2016年大学生研究性学习和创新性实验计划项目(项目编号:CX2016B428);南华大学2016年校级教改课题“工程教育专业认证背景下的‘机电综合技术训练教学改革与实践”。
作者简介:龚郡(1996— ),江西吉安人,本科在读,现就读于南华大学机械工程学院;邓骞(1986— ),湖南衡阳人,讲师,研究生学历,研究方向:机电一体化技术。
