高速重载履带车辆制动滑移控制研究*
2018-07-13张舒阳张豫南宁克焱颜南明方青峰
张舒阳 ,张豫南 ,宁克焱 ,颜南明 ,方青峰
(1.陆军装甲兵学院,北京 100072;2.中国北方车辆研究所,北京 100072)
0 引言
对于履带车辆而言,其制动性能是体现车辆机动性的重要指标。履带车辆行驶工况复杂,惯性大,对制动系统要求较高。滑移是履带车辆在制动过程中普遍存在的现象,特别是在泥泞、冰雪等路面上制动,履带容易出现打滑、抱死等现象,不仅影响车辆的制动性能,还会降低车辆的安全性。因此,对履带车辆制动滑移进行研究很有必要。与轮式车辆不同,履带车辆行走系统力学模型更加复杂,非线性因素较多,滑移控制难度更大。目前对于履带车辆制动滑移问题的研究较少,相反轮式车辆制动滑移控制方法研究则比较成熟[1-10]。针对履带车辆,研究重点也集中在履带滑转控制策略上[11-15]。
本文在对履带车辆进行动力学运动学分析的基础上,建立某型电传动履带车辆动力学模型。以车辆制动滑移值为控制对象,通过半实物仿真分析比较PID控制、模糊控制、模糊PID开关切换以及平滑切换控制策略对于滑移控制的优劣,并在低附路面、低附-高附对接路面、高附-低附对接路面以及对开路面4种工况下进行半实物仿真。
1 履带车辆制动动力学/运动学分析
1.1 整车动力学分析
本文选取我国某型履带车辆,履带车辆质量m=48 000 kg,车高H=2.44 m,履带中心距B=2.8 m,履带着地长L=4.6 m,主动轮工作半径R=0.318 m,车辆制动系统所提供的最大制动转矩Tmax=5 000 Nm,侧减速比为ic=4。车辆传动系统结构见图1所示。

图1 某型电传动履带车辆传动结构
车辆在水平路面直行制动工况下,在竖直方向上受重力mg及地面支持力N作用。在水平方向上受到制动力FB、滚动阻力Ff和空气阻力Fw的作用,制动减速度为a,该方向动力平衡方程表示为[16]:
式中,δ为旋转部件质量换算系数,参考相关文献选取1.3,m为车辆的质量(kg);fs为滚动摩擦系数,取0.04;C为空气阻力系数,取0.6;A为车辆迎风面积(m2),A=nBH,n为修正系数,取 0.8,B 为履带中心距(m),H为车高(m);u为行驶速度(m/s)。
图1结构的电传动履带车辆由于两侧电机互相独立,转速可能不同步造成车辆转向,此时车辆受到离心力的作用,两侧履带载荷不同。车辆除了受到式(1)中各力外,还受离心力J以及转向阻力矩Mf的作用。
离心力在车辆瞬时速度方向上的分力为Jy。由于Jy的作用,车辆两侧履带接地段的法向负荷并不相等,其计算公式为:
式中,N1、N2分别为车辆内、外侧履带接地段法向负荷(N);hg为车辆重心高度(m)。
1.2 行走系统动力学/运动学分析
车辆直行制动时,以一侧履带为例作受力分析。由前述可知,履带在车辆行驶方向受到土壤施加的滚动阻力Ff、半车重Q及其法向作用反力N、制动力FB以及车辆制动系统输出到主动轮的制动力矩TB。其中FB是TB通过履带作用于地面的反作用力。
地面施加的制动力FB并不能够无限增大。其上限主要是土壤抗剪切强度决定的。FB的最大值与N的比值为地面附着系数φ,即
在车辆直线前进时,履带除随车体作牵连运动外,还存在相对于车体的环绕运动。设牵连运动速度为,其方向与车辆速度方向一致,环绕主动轮轴的相对运动线速度为,则履带中任一点的绝对速度为

由平行四边形法则,绝对速度的值为

式中,φ为牵连运动速度与相对运动速度的夹角。
对于履带接地段,其相对运动速度与牵连运动速度方向相反,即 φ=180°。由式(5)可知,当,履带接地段绝对速度为0。一般情况下,,则履带出现滑移,即连滚动带滑动。履带接地段相对地面速度为:

附着系数φ的值受到ur与地面变形量Δ的影响。其计算公式为[17]:

其中,φΔ为履带与地面间静摩擦系数,其最大值为φs,对应门限变形量为 Δmax;φv为履带与地面动摩擦系数,其最大值为φs,对应相对速度us,在履带抱死拖滑时值为φd,对应相对门限速度为ud;β为履带滑动运动的程度,β=0时履带纯滚动,β=1时履带抱死拖滑。
因此,为了使φ最大,应使ur=us。
1.3 车辆动力学模型验证
根据式(1)~式(10),在 MATLAB/Simulink环境下建立某型履带车辆模型。
为了确保滑移控制的可信度,对上述模型进行验证。以该型原理样车在干燥平坦柏油路面由32 km/h初速度最大转矩制动停车工况为例,测量制动距离,与动力学模型在相同工况下仿真结果对比,制动实验结果见表1。从对比结果可以看出,样车制动距离与仿真结果误差在5%以内,说明动力学模型精度可以满足仿真需求。
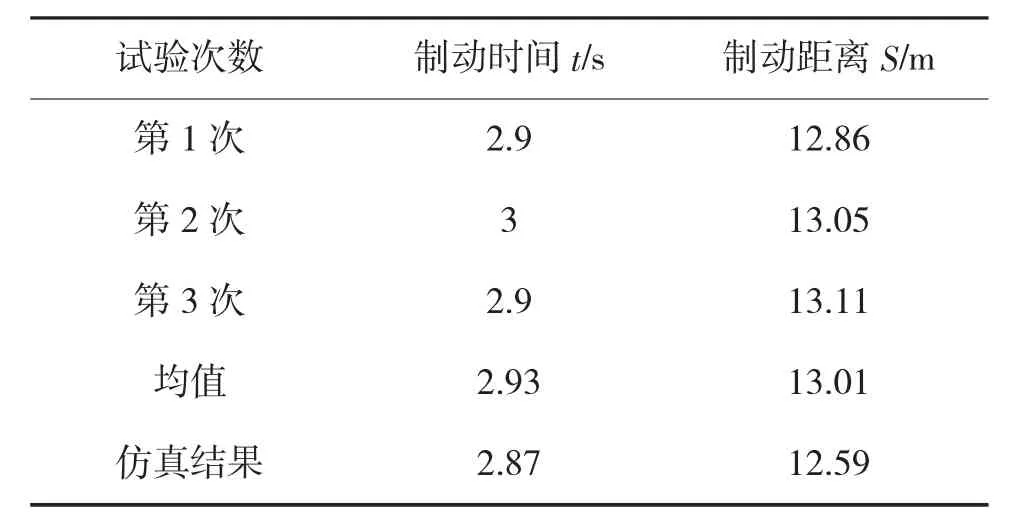
表1 制动试验结果表
2 车辆滑移控制策略的设计
2.1 滑移控制系统设计
履带车辆多行驶于野外工况,干扰因素复杂,履带系统碰撞多,非线性因素多。模糊控制具有不依赖于被控对象的完整数学模型,易于实现、抗干扰能力强、鲁棒性和适应性好,对于履带这类复杂非线性系统而言有很好的控制效果,缺点是存在稳态误差。PID控制可以减小模糊控制带来的稳态误差,提高控制精度。
因此,本文选用模糊控制与PID控制策略相结合的方式,滑移率误差大时采用模糊控制,减小响应时间,提高抗干扰能力;滑移率误差小时采用PID控制,提高控制精度,从而充分发挥车辆的制动性能。
图2为滑移控制策略框图,制动器根据制动踏板开度输出相应制动转矩,若该转矩使得履带打滑严重,则防滑控制器介入作用,降低制动器的转矩输出,实现车辆制动防滑控制。
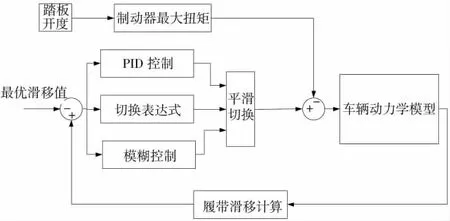
图2 滑移控制策略
2.2 模糊控制器设计
模糊控制器采用双输入、单输出的结构,其中输入为滑移误差以及滑移误差变化率,输出为制动转矩修正系数。
输入量滑移误差的模糊状态论域划分为4个模糊子集:NS(负小)、ZO(零)、PS(正小)、PL(正大),论域等级为{-0.5、0、2、10};输入量滑移误差变化率的模糊状态论域划分为7个模糊子集:NL(负大)、NM(负中)、NS(负小)、ZO(零)、PS(正小)、PM(正中)、PL(正大),论域等级为{-0.9、-0.6、-0.3、0、0.3、0.6、0.9};输出量转矩修正系数的模糊状态论域划分为7个模糊子集:ZO(零)、ZS(零正)、PS(正小)、PM(正中)、PL(正大)、PVL(正很大)、MAX(最大),论域等级为{0、0.05、0.1、0.2、0.4、0.7、0.9}。输入输出量的隶属度函数除边缘采用梯形外,其余均为三角形[17]。模糊规则制定的主要依据是,当滑移小于给定滑移值时,即e为NS,此时控制器输出的调节系数根据ec的变化适当减小,制动系统转矩增大。当滑移大于给定值时,控制器的输出根据ec适当增大从而减小制动转矩,保证了实际滑移值在给定值的附近波动。

表2 模糊规则表
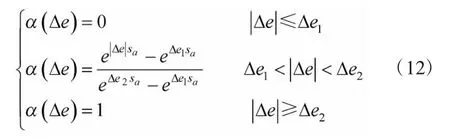
2.3 平滑切换函数设计
通常对复合模糊-PID控制器的切换采用开关切换,大于误差阈值,采用模糊控制,小于误差阈值,采用PID控制。这种开关切换方式存在跳跃性,往往会使系统在切换点不稳定。为了实现模糊控制与PID控制的平滑切换,对控制器的输出进行加权处理,定义为平滑切换权重函数,,则控制器输出ΔT可表达为[18]:

3 仿真与分析
为了验证上述控制方法的有效性,利用MATLAB中XPC工具箱进行半实物实时仿真。图3是实时仿真平台的结构和通信方式。
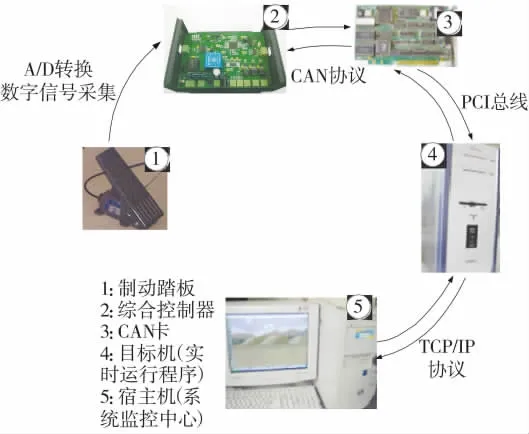
图3 实时仿真平台的结构和通信方式
半实物实时仿真采用宿主机-目标机技术,利用一台计算机作为宿主机,搭建车辆动力学Simulink模型并生成实时运行程序,此后将代码下载至目标机中运行。为减轻CPU负担,目标机上无操作系统(如DOS,WINDOWS等),利于可执行代码的实时运行。目标机上装有一个在MATLAB环境下生成的实时内核,其作用是结合宿主机上的MATLAB,把可执行代码从宿主机上下载到目标机的CPU中并实时运行。宿主机与目标机通过TCP/IP协议通信。
在低附路面(附着系数0.2)上,给定车辆初速度13 m/s,对车辆滑移分别进行PID控制、模糊控制、模糊-PID开关切换控制以及平滑切换控制,其车辆滑移变化曲线如图4所示。
图4中,由于车辆制动时主动轮与履带板产生碰撞,故几种控制方法的滑移曲线在制动初始时刻均有大范围波动。几种控制方法中,模糊控制超调最小但稳态误差最大。其余三种控制方法在主动轮抱死时滑移值变大,但与PID控制及模糊-PID开关切换控制相比,平滑切换控制方法超调更小,响应时间更短,因此,具有最短的制动时间。
为了进一步验证其有效性,针对四种不同路况进行了仿真,仿真时假设路面最佳滑移值为0.5 m/s,高附路面附着系数0.6,低附路面附着系数0.2。
3.1 低附路面制动仿真
控制器参数不变,车辆初速度13 m/s,在低附路面最大转矩制动。其仿真结果如图5所示。
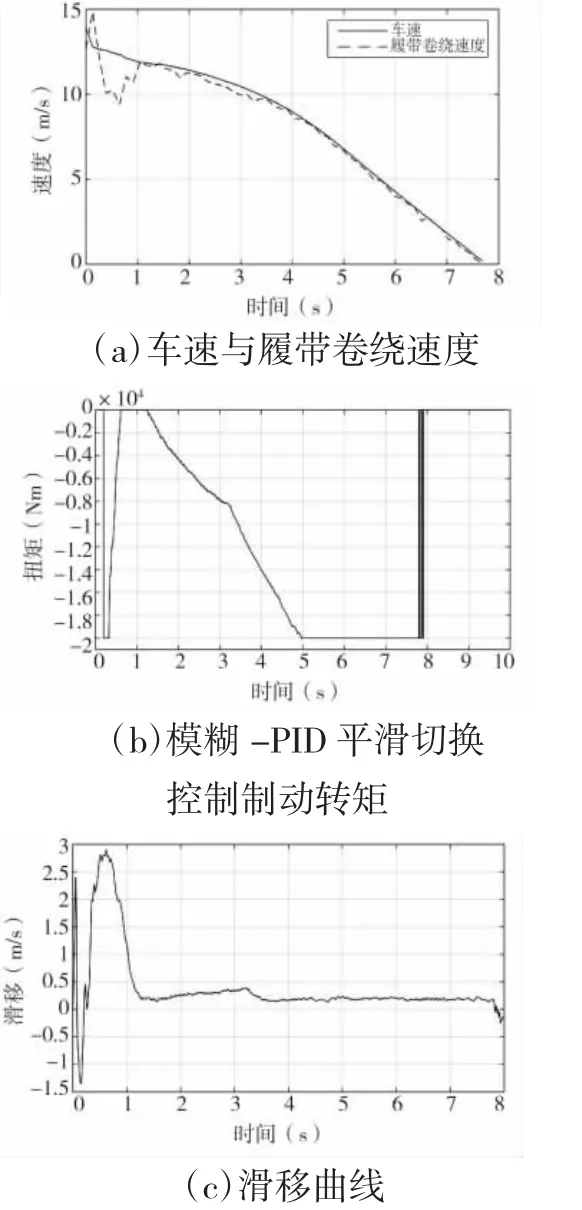
图6 低附转高附路面仿真
仿真结果显示,相比于最大转矩制动,加入模糊-PID平滑切换控制能够在低附路面有效控制履带滑移。车辆制动位移由85.9 m缩短为66.23 m,制动时间由12.87 s缩短为10.04 s,而整个制动过程中主动轮所受最大转矩为15 420 Nm,较制动器最大转矩减少25%,说明控制器可以有效提高车辆在低附路面上的制动性能。
3.2 低附转高附路面制动仿真
保持低附路面参数不变,车辆初速度13 m/s,低附路面长度65 m,而后为高附路面,最佳滑移仍设定为0.5 m/s,最大附着系数0.7,制动踏板踩到底,对车辆进行最佳滑移控制,仿真结果如图6所示。
通过仿真可知,车辆速度曲线斜率在3.1 s后逐渐增大,显示进入高附路面后车辆地面制动力增大。3.1 s后,履带前端进入高附路面,制动转矩逐渐增大,当车辆完全进入高附路面后,防滑控制器不再作用,制动器输出最大转矩。
4 结论
1)对高速重载履带车辆及其行走系统在直线行驶下制动受力情况进行分析,建立了车辆多体动力学模型并采用样车进行验证。提出基于模糊控制与PID控制平滑切换的履带车辆制动滑移率控制策略并进行仿真分析。
2)在低附路面上,采用模糊-PID平滑切换控制算法使车辆制动距离缩短23%,平均制动转矩仅为最大制动转矩的64%。相比于普通PID控制,使车辆制动时间缩短5%。
3)在对接路面上,模糊-PID平滑切换控制算法有较快的响应时间与较小的超调。路面适应力强,控制精度高。在对开路面上,模糊-PID平滑切换控制算法减小车辆侧向偏移59%。缩短制动时间9.4%。有效提高了车辆制动的安全性。
本文以履带车辆最优滑移为控制目标,对车辆制动系统转矩进行控制。下一步将结合电机外特性以及传统机械制动器转矩特性进行制动转矩匹配策略研究。