一种自动代客泊车系统研究
2018-07-13姜灏
姜灏

摘 要:本文提出了一种自动代客泊车系统方案。该系统利用毫米波雷达实现障碍物距离、速度及方位探测;采用摄像头实现可行驶区域行人、车辆及车位的探测;应用激光雷达实现道路边沿及其他障碍物类型探测;通过超声波雷达感知车辆近距离目标距离;通过GPS/IMU获取车辆的定位、姿态信息。通过实车验证,该设计方案能满足实际自动代客泊车应用需求。
关键词:自动驾驶;雷达;摄像头;代客泊车系统
中图分类号:U491.7 文献标识码:A 文章编号:1003-5168(2018)16-0090-04
Research on An Automatic Parking System
JIANG Hao
Abstract: This paper presented an automatic valet parking system. The system used millimeter wave radar to detect the distance, speed and azimuth of obstacles, and used a camera to detect pedestrians, vehicles and parking spaces in the driving region,used laser radar to detect road edge and other obstacle types, used ultrasonic radar to perceive the distance of vehicle near target. The GPS/IMU was used to detect the distance of the vehicle. Through real vehicle verification, the design scheme could meet the actual application requirements of automatic valet parking.
Keywords: autopilot;radar;camera; parking system for passengers
自动代客泊车功能是指当用户到达停车场后,车辆通过自身的环境感知系统检测出泊车位信息,并能自主以低速驶进、驶出停车场,自主寻找停车位、自主泊入空余车位及自主驶出泊车位。同时,该功能也具备驾驶员呼叫功能,即当车主需要用车时,车辆会自主驶出停车场,以较低速度行驶至车主指定地点。自动代客泊车系统相比于传统自动泊车系统,智能化程度更高,极大提高了车辆的智能化水平和安全性,进一步降低了驾驶车辆的难度,提高了驾驶舒适性,还能有效为驾驶者节约时间。同时,对于大型停车场,自动代客泊车能充分利用停车空间,同等区域可多容纳约20%的车辆。
本文旨在利用低成本设备,结合地图技术,实现特定场景的自动驾驶功能,并满足产业化需求,进而提升自主品牌效益,打破国外技术垄断。
1 自动代客泊车系统的总体设计
自动代客泊车系统包括1个控制单元,5个77GHz毫米波雷达,5个高清摄像头,1个16线激光雷达,1个GPS/IMU模块和12个超声波雷达传感器。系统构架见图1。
毫米波雷达包括1个远距离前向雷达和4个宽角度中距离角雷达。1个前向毫米波雷达安装于车辆前部保险杠或进气格栅中央位置。前向雷达天线辐射面与车辆X平面平行,水平位置偏移车辆中轴线小于50cm,安装高度为30~75cm;4个角雷达分别安装于车辆前保险杠两侧及后保险杠两侧,前角雷达天线罩朝向为与车辆前进方向成50°的方向,后角雷达天线罩朝向为与车辆前进方向成45°的方向,角雷达安装高度为30~100cm。激光雷达安装于车辆前保中央位置且位于车辆中轴线上,安装高度为50~80cm,水平偏移小于50cm。GPS天线位于车顶,IMU安装于车舱内并位于车辆中轴线上。12个超声波雷达传感器包括4个侧向超声波探头、4个前向超声波探头、4个后向超声波探头,计算单元安装于车辆前舱内,安装布置见图2。
毫米波雷达可以兼顾前向远距离及车周中距离障碍物目标检测,可以获取车周目标的距离、速度及方位信息。视觉系统主要检测车辆前向中距高清摄像头辐射区域内障碍物目标类型、可行驶区域及道路纹理、行人信息和车位信息等;激光雷达能有效检测车前向中距宽角度范围内道路边沿,障碍物目标距离信息;GPS结合IMU能稳定获取车辆位置及姿态信息;超声波雷达模块能有效获取车周360°近距离目标信息;控制单元通过各传感器获取整个车周环境信息,完成车辆运动路径规划及车辆底层控制,从而实现车辆在低速情况下的自动代客泊车功能。
2 毫米波雷达
本方案采用1个前向雷达与4个角雷达系统不断向汽车前方车辆周围发射高频电磁波以探测车周环境,判定前方及车辆前侧、后侧是否有障碍物;当探测到有障碍物时,雷达系统会获得这些障碍物的信息(距离、相对速度以及方位信息)。这些信息可以通过CANFD总线输送给系统控制单元。
控制单元通过CANFD总线获取雷达的目标数据,然后对这些目标数据进行预处理,筛选出本车行驶道内的前方障碍物距离及相对速度信息。此信息将用于控制单元后续融合视觉信息进行車辆行驶局部行驶路径规划[1]。计算单元对这些数据进行处理,处理流程见图3。实际测试效果见图4。
3 激光雷达
本方案采用16线固态激光雷达。激光雷达置于车前保栅格中央位置,主要用于道路边沿检测及行人车辆等的检测,为无人驾驶车辆提供最小风险的可通行区域[2]。
激光雷达原始点云数据处理过程为:首先把激光雷达的点云数据进行栅格化处理,投影到1 024×1 024的栅格地图中。每个栅格的大小为10cm×10cm,有障碍数据的栅格标记为1,其他栅格标记为0。标记完栅格后对障碍物栅格进行聚类处理[3]。根据前期建立的栅格库进行查表,判定车辆及行人属性。激光雷达实际处理效果如图5所示。计算单元激光雷达程序流程如图6所示。
4 視觉
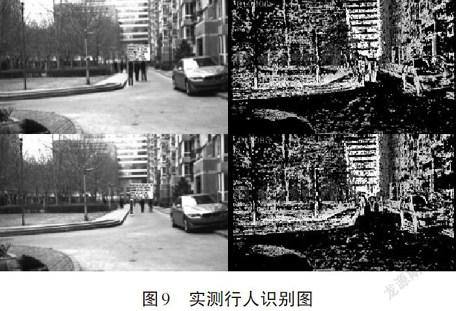
摄像头识别算法处理过程为:读取一帧图像,逐行对图像进行处理。对于图像中的各行,首先,采用对水平方向敏感的Sobel算法增强边缘[4]。其次,对行信息进行处理,进行二值化,对二值化后的数据采用障碍物外边缘提取算法提取障碍物外边缘点[5],得到障碍物外边沿极坐标参数(极坐标半径和角度)。最后,通过支持向量机(SVM)[6],得到路面区域的检测分类器,加载分类器检测出可行驶区域的路面、车辆、行人及车位信息。实际视觉检测效果如图7、图8和图9及表1所示。
5 超声波雷达
超声波雷达能实时检测车周近距离障碍物目标信息,前、后8颗探头支持最远2.5m距离探测,侧向4颗支持最远5.5m距离探测。发射信号激励及回波接收都通过控制单元实现,雷达精度约为0.03m,满足泊车精度要求。
6 GPS/IMU
IMU/GPS模块集成在T-box系统内。T-box安装于车内手套箱下,位于车身中轴线上,系统能实时提供精度维度、授时数据、车身姿态及航向等数据。GPS数据更新频率为30Hz,IMU信息更新频率为10Hz。
7 计算单元
本方案采用的计算单元是基于英伟达Xiaver芯片的嵌入式平台,该平台具备多路CAN/CANFD接口、以太网接口及GMSL接口,同时具备足够的I/O接口供实际使用,此开发板运算能力完全满足实际应用需求。
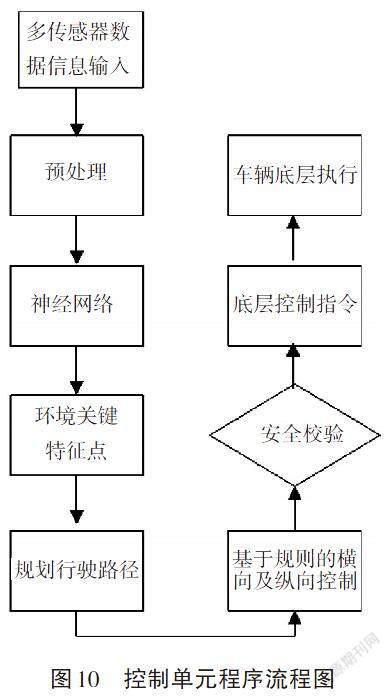
控制单元软件架构包括感知系统、本地环境建模系统和决策规划与控制系统。感知系统负责处理传感器得到的视觉图像、毫米波雷达、超声波雷达及激光雷达等信息,并对多源传感器数据进行数据融合处理,经过深度学习得到车辆可行驶区域、行人、车辆及停车位信息,建立本地车周环境模型[7]。
决策规划系统基于人类驾驶经验,决策出合理的动作规划。这个动作经过控制系统得到具体的行为序列,即横向、纵向控制指令。行为序列经过安全校验后,软件层面确定安全,再把指令控制下发给车辆总线执行转向、油门和制动执行。实施程序如图10所示。
8 结语
本文提出了一种代客泊车总体设计方案,该方案对选用的传感器类型、厂家型号,传感器安装位置,数据传输方式及接口进行了详细阐述。该方案最大的特点在于所采用的硬件、所选通信接口都采用车规级方案,是可实施的量产方案。最终通过实车验证,泊车性能基本达到应用要求。
参考文献:
[1]Bast H,Delling D,Goldberg A,et al. Route Planning in Transportation Networks[M]// Algorithm Engineering. Berlin:Springer International Publishing,2016.
[2]Havlak F,Campbell M. Discrete and Continuous, Probabilistic Anticipation for Autonomous Robots in Urban Environments[J]. IEEE Transactions on Robotics,2014(2):461-474.
[3]Quan T, Firl J. Modelling of Traffic Situations at Urban Intersections with Probabilistic Non-parametric Regression[C]// Intelligent Vehicles Symposium. IEEE,2013.
[4]Grisleri P. The BRAiVE Autonomous Ground Vehicle Platform[J]. IFAC Proceedings Volumes,2010(16):497-502.
[5]Wei J,Dolan J M,Litkouhi B. A Prediction- and Cost Function-based Algorithm for Robust Autonomous Freeway Driving[C]// Intelligent Vehicles Symposium. IEEE,2010.
[6] Ferguson D, Darms M,Urmson C,et al. Detection, Prediction, and Avoidance of Dynamic Obstacles in Urban Environments[C]// Intelligent Vehicles Symposium. IEEE,2008.
[7] Xu L,Yan Q,Xia Y,et al. Structure Extraction from Texture Via Relative Total Variation[J]. Acm Transactions on Graphics,2012(6):1-10.
