基于试飞数据的直升机气动模型参数频域辨识
2018-07-13李富刚石佳伟张文星
李富刚 石佳伟 张文星
摘要:针对直升机气动强耦合、强非线性、不稳定的特点,采用扫频方式获取飞行试验数据及频域辨识技术进行其气动模型辨识。首先分析了气动辨识模型、飞行试验数据需求,并对飞行试验动作进行设计,然后形成气动模型频域辨识流程。在纵向气动模型辨识过程中,发现扫频飞行试验数据低频、高频段数据质量差,纵向和横向通道舵偏相关性强等问题。
关键词:频域辨识;飞行试验;直升机气动参数;低阶等效系统;直升机试飞
中图分类号:V217+.1 文献标识码:A
直升机气动模型辨识广泛应用于直升机飞控设计、检验,动力学仿真模型校准、验证,设计规范符合性检验等工作。由于直升机旋翼既是升力面又是俯仰和滚转控制操纵面,旋翼对尾桨、机身及尾翼的干扰等使得直升机气动呈现强耦合、非线性,测量数据信噪比低,动态响应不稳定等特性[},zl。与固定翼飞机相比,这些特性导致直升机气动参数模型辨识面临更大的挑战。研究表明,频域辨识方法是解决直升机气动模型辨识的有效手段,美国陆军航空设计标准规范ADS-33E-PRF要求用飞行试验的频域响应数据进行符合性检验[3]。
在某型直升机型号试飞中,国内开展直升机基于频域响应飞行试验数据的规范符合性检验,在飞行试验的设计、试飞数据的采集、模型时域验证等环节工程经验不足。本文通过利用频域辨识软件(CIFER)进行该型直升机的气动模型参数辨识工程应用,发现扫频飞行试验数据低频、高频段数据质量差,旋翼桨叶挥舞参数缺失,各通道舵偏相关性强等问题,并给出相应的改进建议。
1 直升机气动辨识模型
频域辨识可基于传递函数模型,也可以基于状态方程,气动辨识基于状态方程,其形式如下:
Mx=Fx+Gu(t-τ)(1)
y=H0x+H1x(2)
式中:M为质量矩阵,F为稳定性导数矩阵,G为控制导数矩阵,τ为时间延迟项,x为状态变量,u为控制输入,y测量输出方程。辨识气动导数时控制输入量取飞控系统与混合器综合后的直升机舵偏操纵量,如图I所示。
旋翼和机身之间的耦合程度的大小直接影响气动模型复杂程度。耦合程度小的情况下,气动模型中可忽略旋翼桨叶的挥舞运动;反之,则需要将旋翼桨叶挥舞包含在气动模型之中。旋翼和机身的耦合大小主要取决于旋翼有效挥舞刚度大小。通常小的挥舞铰偏置具备小的挥舞有效刚度,旋翼与机身耦合小;大的挥舞铰偏置或无铰旋翼系统,有效挥舞刚度大,旋翼与机身耦合大[4,5]。
某型直升机旋翼采用柔性桨毅,属于无铰旋翼系统,旋翼与机身耦合大。但由于国内在测量旋翼桨叶挥舞运动方面经验不足,飞行试验测试数据中没有旋翼桨叶挥舞参数,因此,在建立气动方程时不考虑包含旋翼与机身的耦合特性,将旋翼视为产生气动力的部件,忽略其自身的动力学特性[6,7]。
2 飞行试验
高质量的扫频飞行试验数据是进行气动参数辨识的前提,為了获得高质量的飞行试验数据进行飞行试验设计。飞行试验设计包括数据需求分析、飞行试验实施。
2.1 数据需求分析
由于忽略了旋翼自身动力学特性,气动模型辨识时将直升机简化为刚体进行处理,重点关注气动对飞行品质的影响,而飞行品质主要集中于0.3~12rad频率段,因而将此段频域作为直升机气动模型的频域辨识频率段。辨识气动模型需要的测试参数有控制输入量:纵向、横向、航向及总距4个通道的舵偏量bls、als、thtr、thte;观测量:滚转、俯仰、偏航三轴角速率p、q、r,欧拉角phi、the、psi,体轴过载axb、ayb、azb及速度u、v、w。国外做相关研究时,还对旋翼桨叶的挥舞运动、摆阵相关参数进行测量[8,9]。
频域参数辨识测量数据的采样率有要求,由于传感器噪声及大气扰动等因素的影响,美国国家航空航天局(NASA)工程师给出经验准则:
Ws)≥25wmax(3)
式中:ws为采样率,wmax为辨识频率段最大值。根据式(3)准则计算出的采样率为50Hz。
2.2 飞行试验实施
频域辨识用扫频输入飞行数据进行辨识,用脉冲、倍脉冲或3211等与扫频输入非相似输入的飞行数据进行时域验证。为能充分激励直升机的响应,扫频信号的频谱(激励谱)在期望的频率范围内应具有均匀的分布。由于直升机的不稳定性,特别是对于低频段,扫频非常难完成。飞控系统抑制驾驶员激励信号,低频范围抑制更严重;引入交叉控制的关联信号;另外,飞控系统引起输出噪声和激励信号相关。因此,飞控系统功能应尽可能多的关掉,最好是直连模态[10]。
飞行试验过程中,由于燃油的消耗,飞机质量、惯量以及重心的位置均随时间发生变化,而线加速度等传感器不能根据重心的位置及时的进行校正。因此,为了能够得到高质量、好的飞行数据,同一个通道的辨识、验证数据要尽可能在时间上连续进行,以使飞机质量、惯量、重心位置的变化对测量影响最小。某个通道的扫频飞行试验中,在连续做三个合格的扫频激励,再做两个合格的时域验证激励。在此过程中,其他三个通道可以进行操纵使试验不偏离配平状态点,但操纵不能与激励通道的扫频信号相关联。飞行试验应在无风、没有大气扰动的平静的环境中进行。
3 辨识流程
气动辨识流程如图2所示,CIFER软件没有集成飞行数据相容性检验和重构模(SMACK模块),从频域响应计算到时域验证步骤CIFER均有相应的专用计算模块,数据的相容性检验基于增广卡尔曼滤波估计方法完成。
4 算例
以纵向气动模型辨识为例,进行气动导数辨识。式(4)、式(5)按照式(1)、式(2)给出了纵向气动辨识模型。在气动力、力矩导数除去质量和响应的惯量后,M取单位矩阵,状态量取体轴x轴速度u、俯仰角速度q、体轴z轴速度w、俯仰角the;输入量为纵向周期变距角bls,总距角thte;测量量有u、q、w、the、纵向过载axb、法向过载azb。式中:X为气动力在体轴x轴分量,M为俯仰力矩,Z为气动力在z轴分量。由于速度u、w数据质量差,无法用于辨识,而过载axb、azb频域数据质量较好,因此,辨识中引入这两个过载作为观测量。经过参数整定后,去除Mu、Mthe、Zu、Zthe、Xthe、Mthe参数,将Xu、Xq、Zw固定下来。其余参数辨识结果见表1、表2。不敏感性值均小于10%,克拉美罗边界(CR)小于20%,代价函数平均值约为56.745,小于100。辨识参数的不敏感性、CR、平均代价均达到CIFER推荐的状态方程辨识准则。
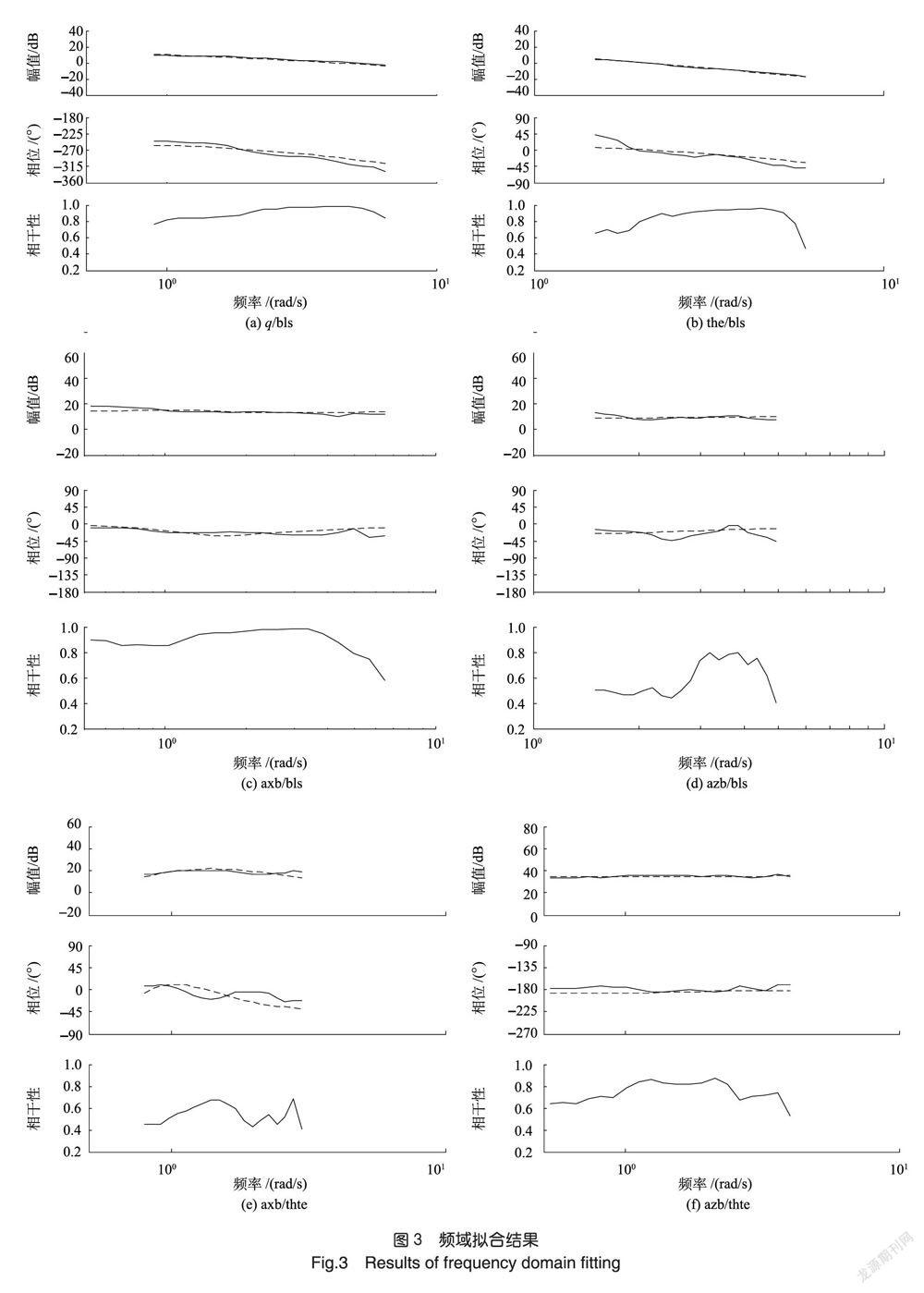
在研究的频域段内,辨识仿真结果与试飞数据拟合情况如图3所示(实线为飞行试验数据,虚线为模型拟合数据)。拟合的频率范围为0.8~8rad,低频段0.3~0.8rad和高频段8~12rad的数据缺失。低频段缺失是由于试飞员低频扫频缺失造成的;高频段缺失是由于飞控低通特性造成的,虽然试飞员扫频输入信号中包含高频段输入,但经过飞控系统后,高频度输入被滤除掉。在速率控制(RC)模式下的纵向扫频数据,试飞员纵向与横向操纵输入线险相关度大于0.8,无法用于辨识。
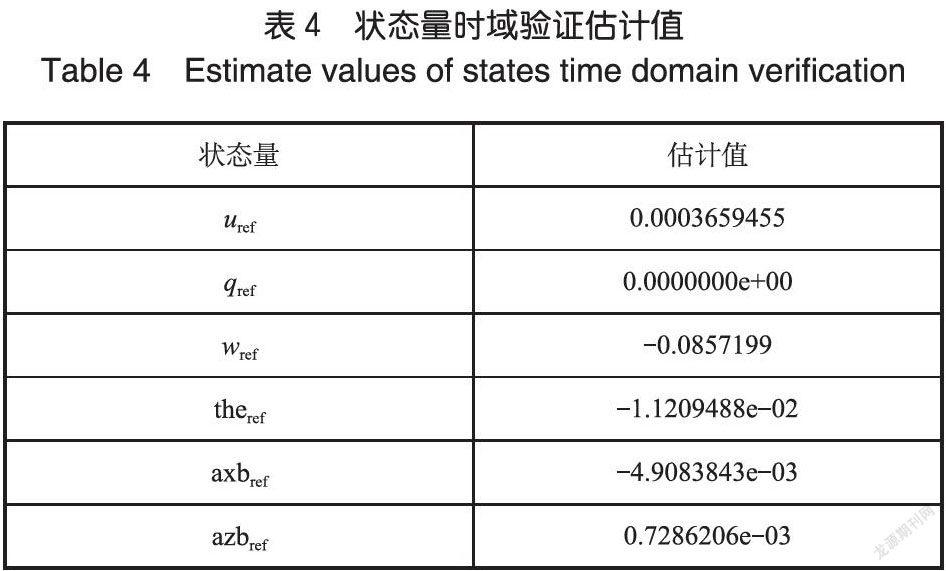
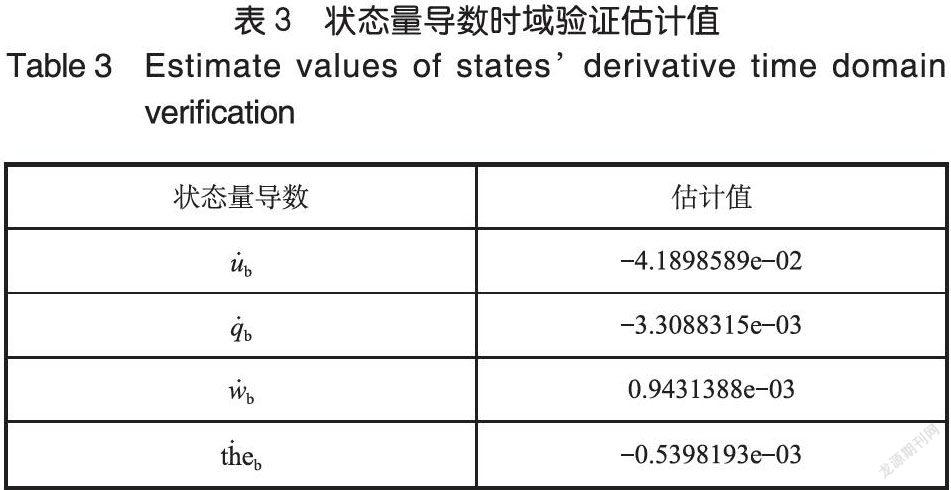
时域验证按照式(6)、式(7)的模型进行验证,引入交卜yref来考虑湍流或其他扰动对状态量的影响和测量量中的误差。由于直升机悬停状态含有不稳定模态,小的误差影响将以指数规律增加,淹没预测值,因此,xb、yref需通过辨识得到,而不取前2s的飞行数据进行估计。
Mx=Fx+Gu(t-τ)+xb(6)
y=H0x+H1x+yref(7)
表3和表4分别给出了xb、yref的估计值。在频域辨识之前,已经对飞行数据进行了相容性检验和重构处理,故交卜yref值均很小。
时域验证结果如图4所示(实线为飞行试验数据,虚线为模型拟合数据),采用和扫频输入非相关的脉冲输入来验证。加权最小均方误差函数为0.163,TIC(Theil不等式系数)值为0.115,均达到CIFER时域验证准则。
5 结论
本文就频域辨识方法辨识直升机气动参数步骤和流程、飞行试验的设计等进行了分析和研究,并开展了纵向气动模型辨识工作。对工程应用频坷幽辛识直升机气动参数形成以下建议:
(1)避免由飞控系统引起控制舵偏输入之间的耦合,及飞控反馈通道引入测量误差关联,飞行试验时在保证飞行安全的前提下尽量多地关掉飞控功能。
(2)某个通道做扫频输入时,其他通道可维持配平状态的控制输入,不能与扫频通道发生关联。
(3)扫频试验时,低频段扫频最难控制,给低频段扫频留充足的时间,国外品质分析标准为40s两个周期低频扫频。
参考文献
[1]Strope K,Boden C,Harding J.Verification and validation of aUH-60 FLIGHTLAB model in support of the UH-60M limiteduser test[J].American Helicopter Society Annual Forum,2004(6): 33-40.
[2]馬克·B.蒂施勒,罗伯特·K.伦佩.飞机和旋翼机系统辨识:工程方法和飞行试验案例[M].张怡哲,左军毅,译.北京:航空工业出版社,2012.
[3]Larry O D.ADS-33E-PRF Aeronautical design standard:handling qualities requirements for military rotorcraft[S].America:United States Army Aviation and Missile Command,2000.
[4]Bernard M,Takeo K,Mark B T.System identification modelingof a model-scale helicopter[Z].Journal of the AmericanHelicopter,2010.
[5]Vladislav K,Eugene A M.Aircraft system identification theoryand practice[M].USA:America Institute of Aeronautics andAstronautics,2006.
[6]William Y A,John O B,Randall G O,et al.Validation flighttest of UH-60A for rotorcraft systems integration simulator(RSIS)[Z].California:United States Army Aviation EngineeringFlight Activity Edwards Air Force Base,1982.
[7]Kirs S,Christopher K B,Jeff H.Verification&validation of aUH-60 flightlab model in support of the UH-60M limiter usertest[J].American Helicopter Society,2004:7-10.
[8]Davud L K,Raymond S H,William B C,et al.Helicoptersimulattion validation using flight data[R].Calfornia:AmerResearch Cernter,1982:50-60.
[9]Michelle M E,Diego O,Giovanni B,et al.Results of an A109simulation validation and handling qualities study[R].California:National Aeronautics and Space Adminitration,1989:200-205.
[10] Mark G B.Validation of a real-time engineering simulation of theUh-60A helicopter[R].California Ames Research Center,1987.
