变稳直升机模拟参数设计
2018-07-13王锋李富刚房圣友
王锋 李富刚 房圣友
摘要:变稳模拟参数的确定是变稳直升机建设的首要任务。基于ADS-33E典型旋翼飞机飞行品质标准,分析了包括响应类型等在内的旋翼飞机典型飞行品质及表征参数;从飞行品质研究和试飞员培训的需求出发,提出变稳直升机基本的模拟能力,设计典型的控制策略;最后在典型模拟器环境中对变稳直升机的轴间耦合、模态特性以及响应类型等进行了仿真验证,表明本文提出的变稳机直升机模拟参数设计方法是可行的。
关键词:变稳直升机;直升机飞行品质;试飞员培训;响应反馈;控制策略
中图分类号:V217+.1 文献标识码:A
与固定翼变稳飞机类似,变稳直升机也是通过变稳飞行控制系统、可变人感系统等方式改变飞机的操纵响应特性,实现对不同直升机的飞行动力学、稳定性、操纵性及人机工效等特性进行空中飞行模拟的试验平台。对变稳直升机来说,其核心的一个问题便是其所具备的模拟能力,即确定合理的模拟参数。世界上已先后成功研制了十多架变稳直升机,如德国的BO-105变稳直升机,加拿大的贝尔一05和贝尔-412变稳直升机[1],美国的CH-46、S-76“影子”、UH-60、SH-60变稳直升机、俄罗斯的米-4和米-6变稳直升机等,这些变稳直升机在飞行员培训和飞行品质研究领域得到广泛应用[2]。我国曾开展过直升机变稳能力和变稳控制技术的先期研究工作,但未涉及和考虑变稳直升机模拟参数的设计。近年来,国内直升机发展迅速,新的旋翼机飞行品质规范ADS-33E-PRF也已经发布,这些都给变稳直升机模拟参数的设计带来很大挑战。
本文基于对ADS-33E-PRF旋翼机飞行品质规范关键条款的分析,从飞行品质的角度提出变稳直升机的控制策略,并以某型直升机气动模型为基础设计了相应的变稳控制模态,最后在模拟器上通过飞行员和试飞工程师的模拟飞行进行了验证,为我国变稳直升机的设计和研制提供借鉴。
1 基于ADS-33E-PRF飞行品质关链条款的分析
典型的旋翼机飞行品质标准历经两代,首先是MIL-H-8501和MIL-H-8501A,该标准由于不能反映現代武装直升机在夜间及其他恶劣气象条件下的近地面或贴地飞行的要求而存在明显不足。随后取而代之的便是ADS-33E-PRF,其版本也不断进行修订。目前,ADS-33E-PRF便是国际上最为成熟的军用直升机飞行品质规范,条款要求完全涵盖了飞行品质的关键要素,主要包括稳定性、操纵性以及操纵系统特性三个部分。而多样的响应类型作为旋翼机飞行品质的重要组成部分也在该标准中明确,且和任务动作基元相关联[3]。
(1)操纵性和稳定性要求
在该飞行品质标准中对悬停/低速、前飞等状态下的直升机稳定性明确了详细要求。因此,ADS-33E-PRF根据旋翼机的特点关注了直升机4个轴方向的响应:俯仰、滚转、偏航和垂直。与固定翼飞机不同的是,旋翼机将这些响应根据幅值和频率确定为配平状态(任何幅值、长周期响应)、中等偏大幅值和低中频率、小幅值和中高频率、小幅值和低中频率,其划分方式如图1所示。
如针对悬停及低速状态,飞行品质主要对俯仰(滚转)姿态变化、偏航姿态变化、高度响应特性、轨迹稳定性、静稳定性等有明确的要求。这些典型的飞机特性均可用频率、阻尼比和时间常数等参数表征,如对于高度响应来说,高度和总距的关系呈现一阶特性,利用时间常数和延迟可表征其典型特性。
另外飞行品质评估准则也体现了这些典型参数,且频率、阻尼比和时间常数等典型参数也在ADS-33E-PRF推荐的带宽准则中得到体现。另外从飞行员的角度出发,这些参数最被关注且感受最直接。
(2)响应类型的要求
在旋翼机飞行品质标准中,响应类型是依据适用的任务动作基元(MTE)和可用感示环境来确定。与固定翼飞机相比它的响应类型较多,如速率控制(RC)、速率控制姿态保持(RCAH)、姿态控制姿态保持(ACAH)、速率控制航向保持(RCDH)、速率控制高度保持(RCHH)、平移速率控制(TRC)以及各个通道不同响应类型的组合控制等[4]。因此,在对旋翼机飞行品质评价时,首先需要建立对响应类型的理解,这也是直升机飞行员评价飞行品质的基础。
2 基于飞行品质的变稳参数设计
2.1 变稳需求分析
从飞行员培训和飞行品质研究的角度来看,期望变稳直升机提供典型的飞行品质特性,让飞行员熟悉和掌握不同飞行品质的特点[5]。从旋翼机飞行品质内容的分析来看,结合现有国内旋翼飞机飞行品质和飞控技术的发展,变稳直升机的变稳功能需满足以下三个需求:
(1)能模拟轴间耦合
轴间耦合是直升机驾驶的一个显著特点,除了操纵轴上的,在轴响应外还会出现离响应,轴间耦合增加了直升机操纵的复杂性和飞行员的工作负荷。随着直升机飞控技术的发展,通过混合器以及飞控中类似混合器功能的控制,现代直升机轴间耦合已经变得很小,采用电传飞控的直升机甚至基本消除了轴间耦合。无论是理解直升机气动特点,还是发生飞控故障时提升对直升机的控制,对飞行员进行轴间耦合培训都显得尤为重要。
(2)能模拟典型的模态特性
目前,典型的模态特性根据其幅值和频率的大小利用带宽准则和敏捷性指标进行评判。飞行员对这些特性的感觉主要体现在阻尼比、操纵灵敏度(前馈)、时间延迟等参数上。因此,要模拟典型模态特性就必须对阻尼比、操纵灵敏度和时间延迟进行模拟。
(3)能模拟不同的响应类型
响应类型多样性是旋翼飞机的特点,也是其飞行品质重要的组成部分。因此,变稳直升机需要具备模拟不同响应类型的功能,才能培训飞行员熟练掌握旋翼飞机的飞行品质。
2.2 变稳模式设计
对变稳直升机来说,混合器可以实现直升机的操纵解耦与耦合控制,进而实现轴间耦合的模拟;通过响应反馈的控制方式,可以实现各种不同模态特性及响应类型;通过模型跟随的控制方式,可以实现对新机控制律或先进控制律的验证。采取上述控制方式基本能够满足飞行员的培训需求[6,7]。
图2为变稳直升机控制策略示意图。在正常模式下,控制输入与原机相联,当飞行员对模式进行选取时可断开原机操纵,选择控制混合器、响应反馈或者模型跟随模式。其中,通过混合器控制模式实现轴间耦合模拟;响应反馈模式通过前馈和反馈对直升机呈现的阻尼比、操纵灵敏度和时间延迟等参数进行调整,根据反馈参数的不同,响应反馈模式实现不同的响应类型;模型跟随模式主要是采取模型跟随方式使得变稳直升机实现不同的响应类型。混合器控制、响应反馈和模型跟随均属于变稳模式。因此,必须实时对直升机安全进行监控,若出现影响安全的因素,电传系统或者飞行员均有权将变稳模式切换至原机操纵模式。图3为响应反馈控制回路示意图,图4为模型跟随控制回路示意图,其模型机为具有典型响应类型的飞机模型,而增稳与补偿控制回路负责飞机频率和阻尼的调整。
3 算例分析与飞行员评述
为了进一步验证上述变稳参数选取的合理性,本文以某型直升机为原型机,采取响应反馈的方式设计了典型变稳直升机的控制系统,并在某型模拟器中进行了飞行验证。
3.1 响应反馈模式下不同飞行品质的模拟结果
响应反馈模式可实现变阻尼比、时延、前馈增益及各种响应类型的模拟。下面以纵向通道为例进行说明。
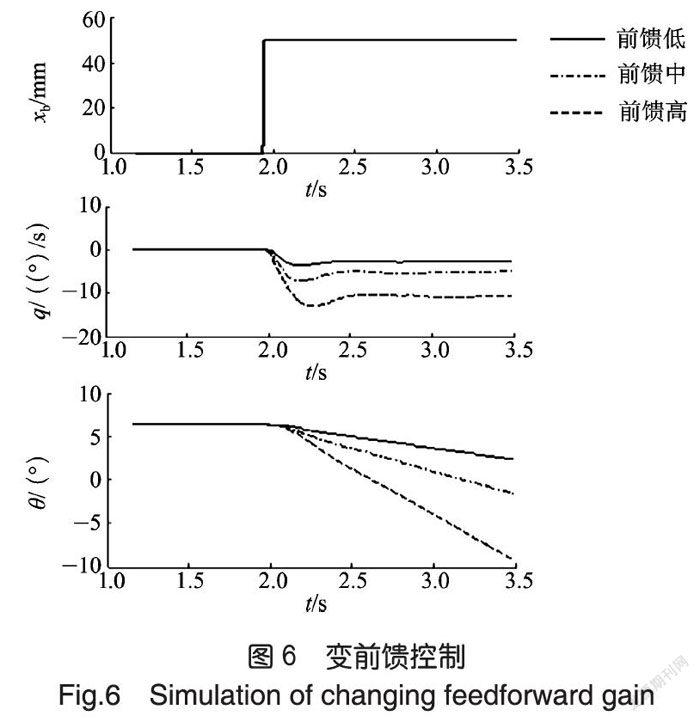
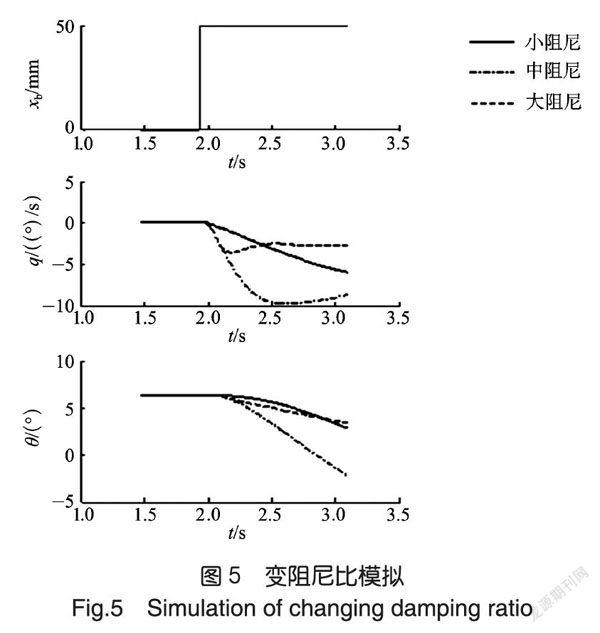
图5为变阻尼比的模拟结果,可以看出:小阻尼比时,俯仰角速率呈现发散趋势;中阻尼比时,俯仰角速率收敛,但是收敛时间较长;大阻尼比时,俯仰角速率收敛时间较短,稳态值最小,需要通过增大前馈来增强控制。图6给出了大阻尼比情况下改变前馈增益的模拟结果。前馈越大,俯仰角速率的稳态值越大,操纵性越好,体现了“高增益,高阻尼”的飞控设计思想。
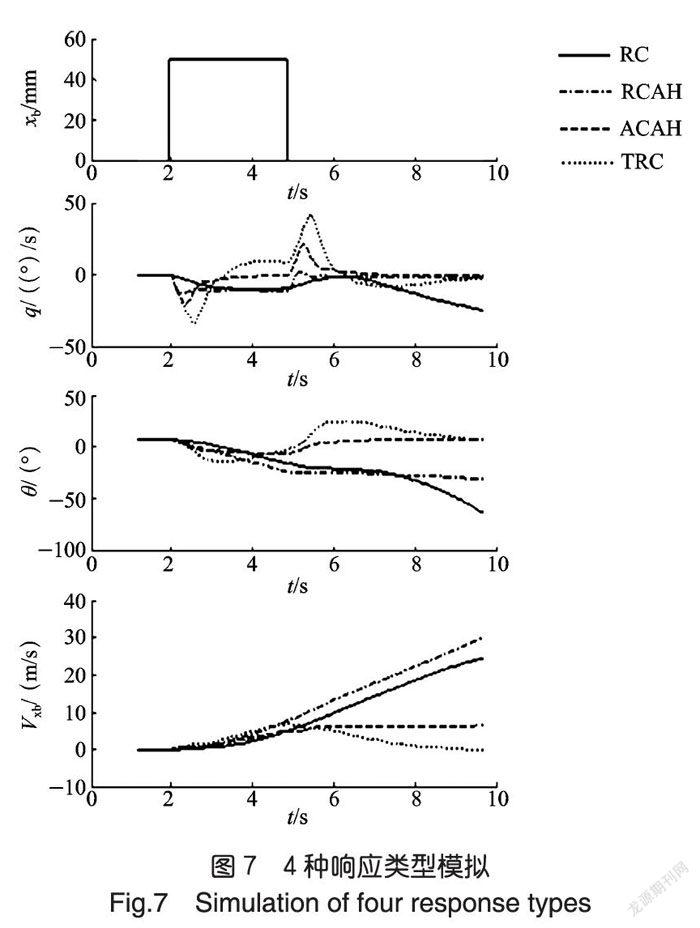
3.2 响应反馈模式下不同晌应类型的模拟结果
图7给出了速率控制(RC)、速率控制姿态保持(RCAH)、姿态控制姿态保持(ACAH)、平移速率控制(TRC)。其中,RC响应类型时,杆位移对应角速率响应,这种对应关系要求不是很嚴格,杆回中时,角速率有回零的趋势,但一般情况下不能回到零位;RCAH响应类型时,杆位移对应角速率响应,这种对应关系严格,杆回中时,角速率回零;ACAH响应类型时,杆位移对应姿态响应,这种对应关系严格,杆回中时,姿态回到初始配平时的姿态;TRC响应类型时,杆位移对应速度,这种对应关系严格,杆回中时,速度回零。按照RC、RCAH、ACAH、TRC的顺序,稳定性逐渐增强,可适用的可用感知环境(UCE)等级逐渐降低。
3.3 试飞员/试飞工程师评述
系统开发完成后,多名具有丰富直升机试飞经验的试飞工程师和试飞员对其进行了评价:
(1)通过混合器的控制,可以直观地体验总距通道与纵向、横向、航向之间的耦合以及航向与纵向之间的祸合;轴间耦合模拟增强了试飞员对直升机气动本体特性的理解。
(2)基于响应反馈的控制方式能基本涵盖现有典型的旋翼机飞行品质特性,在飞行品质研究特别是飞行员培训方面具有很强的指导作用。
(3)响应类型是电传直升机飞行品质的重要组成部分,利用响应反馈的控制方式可以模拟不同的响应类型,加深飞行员对旋翼机飞行品质的理解。同时,随着响应类型级别的提高,直观的感受为直升机稳定性增加和操纵负荷减轻,但需要更精准的操纵。
通过试飞工程师和试飞员的评价可以看出,本文所提出的模拟参数基本可以涵盖旋翼机飞行品质模拟的各种需求,控制策略设计简单,安全可控。
4 结束语
变稳直升机是旋翼机飞行员培训最为有效的平台,而变稳控制策略是其中最为核心的技术。本文分析了旋翼机的飞行品质特点,给出了变稳直升机模拟关键参数和变稳控制模式的建议,初步解决了变稳直升机模拟什么以及如何模拟的问题。除此之外,完善的变稳直升机控制策略还应包括:人感特性、人机工效、任务系统等的模拟以及安全控制策略的设计等,这些本文尚未涉及,是下一阶段的研究内容。
参考文献
[1]Arthur W G,Ellis D K.The NRC bell-412 advanced systemsresearch aircraft-facility description and results of initial flighttesting[Z].Canada:National Research Council of Canada,1985.
[2]Ohmit E E,Easer J R,Govindaraj K S.Augmented aircrafthandling qualities[Z].New York:Calspan,2006.
[3]Larry O D.ADS-33E-PRF Aeronautical design standard:handling qualities requirements for military rotorcraft [S].America:United States Army Aviation and Missile Command,2000.
[4]张宏林,田磊,周禹,等.加拿大变稳直升机试飞技术培训技术总结[Z].西安:中国飞行试验研究院,2017.
[5]王锋,李富刚,房圣友.某型变稳直升机建设立项论证报告[Z].西安:中国飞行试验研究院,2017.
[6]杨生民,章伯定.直升机空中模拟在试飞员培训中的发展与应用[2].西安:中国飞行试验研究院,2013.
[7]李富刚,张毅,丁团结.变稳直升机控制与变稳能力估算方法[J].飞行力学,2014,32(5):385-388.
