基于专利分析的手术机器人竞争态势研究*
2018-07-12欧阳昭连
张 婷 池 慧 欧阳昭连*
手术机器人是一种智能外科手术工具,将手术的精度和可行性提升到全新的高度,提高了临床操作准确性和手术成功率[1]。目前,手术机器人已广泛应用于神经外科、腹腔外科、胸外科、骨外科及眼科等手术中[2]。借助手术机器人,临床手术实现了远程手术、微创手术和无人手术三大革命性进步,相比传统手术,具有精确操作、灵活性和稳定性好等优点,可实现微创化、数字化和智能化手术为一体,疗效更好、更安全[3-6]。
专利是技术信息最有效的载体,囊括全球90%以上的最新技术情报,且内容详实准确,专利分析是情报学中重点技术分析的主要手段和方法[7-9]。通过对某一领域的专利分析,能够客观反映专利技术的整体概况和发展态势,可以方便、有效、准确地了解相关技术创新及技术发展状况[10-12]。本研究对手术机器人领域的专利进行分析,多角度全面分析手术机器人领域的竞争态势,追踪研究现状和发展态势,为我国手术机器人的研发提供一定的借鉴和参考。
1 数据来源与分析工具
1.1 数据来源
数据来源于Derwent Innovation(DI)平台(原Thomson Innovation,TI),是国际权威的专利数据库,集全球最全面的国际专利与业内最强大的知识产权分析工具于一身,可提供全球专利信息。本研究采用DI平台(检索范围:增值专利信息-DWPI和DPCI)进行数据检索、采集,并进行部分可视化,数据检索及采集时间:2018年1月8日。
1.2 分析工具
数据导入到数据分析工具(Derwent data analyzer,DDA),原(Thomson data analyzer,TDA)中进行分析,DDA是个具有强大分析功能的挖掘软件,可以对研究中的数据进行多角度数据挖掘和可视化的全景分析。本研究用DDA进行数据清洗、专利计量分析及部分可视化。
2 手术机器人竞争态势
2.1 总体竞争态势
(1)专利年度分布。手术机器人领域共有专利1491项。1994年,手术机器人领域有了第1项专利申请,此后数年处于发展的空白期;1998年后呈现出连续申请的发展态势;2002年开始,进入第1个较快速发展时期,于2006年达到第1个峰值(113项),此后稍有回落;2010年以后进入第2个快速发展时期,于2015年达到峰值(171项)。手术机器人专利数量年度分布如图1所示。
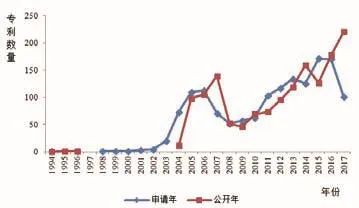
图1 手术机器人专利数量年度分布示图
(2)专利公开情况。自1995年第1项专利公开开始,1996年专利公开1项,此后数年专利公开情况一直处于空白,直到2004年才开始连续稳定的专利公开。由此表明,最初手术机器人发展比较缓慢,需要突破的技术难点很多。2004年后,专利公开呈现稳定的发展时期,2007年达到第1个峰值(139项)。2008-2009年呈现较明显回落,从2010年后的专利公开数量又呈现快速上升的趋势,2014年达到第2个峰值(159项),2015年稍有回落,但此后的专利公开数量呈现直线上升的态势,于2017年达到最大值(220项)。手术机器人的专利公开态势表明,近年来该领域发展十分迅速,有大量专利公开,技术发展迎来新的时期。由于专利文献从申请到公开有一段时间的滞后期,因此2016年和2017年专利申请数量仅供参考,不代表最终趋势。
2.2 技术生命周期
有研究表明,专利技术在理论上会遵循技术生命周期的4个阶段进行周期性变化,即引入期、发展期、成熟期和衰退期[13]。通过对手术机器人领域的专利信息进行统计学的量化分析,得到其专利技术生命周期图,可以客观地掌握该技术领域的技术发展历史、现状与趋势。手术机器人领域的技术生命周期如图2所示。

图2 手术机器人领域的技术生命周期示图
图2可显示,手术机器人发展主要经历了技术萌芽期、技术发展期和技术成熟期3个阶段。
(1)第一阶段-技术萌芽期(1994-2002年)。这一时期专利申请数和专利申请人数均处于低水平缓慢增长态势,手术机器人领域发展尚不成熟。
(2)第二阶段-技术发展期(2003-2013年)。这一时期的专利申请数和专利申请人数极大增加,呈线性增长,随着专利申请数量的不断增长,专利权人的数量也在增长,表明技术研究受到广泛重视,有很多创新主体不断涉足手术机器人领域,出现许多突破性进展。
(3)第三阶段-技术成熟期(2014年至今)。这一时期随着专利申请数量的增加,专利权人的数量有所减少,表明手术机器人领域已经取得长足发展,处于比较成熟稳定的发展时期,不再有新的创新主体涌入该领域。
2.3 区域竞争态势
(1)技术发源地。通过对专利权人的国籍进行分析,可以揭示技术发源地。手术机器人领域技术发源地全球分布包含20多个国家和地区,主要技术发源地在美国、中国、韩国和德国等(如图3所示)。
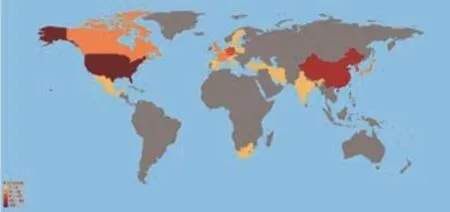
图3 手术机器人领域技术发源地全球分布图
(2)专利数量排名。在手术机器人领域专利数量排名前10位的技术发源地中,美国的领先优势十分明显,占该领域全球专利数量的43.19%,专利数量超过其他9个国家专利数量之和,在全球手术机器人领域处于绝对的领先地位。中国排名第2位,与美国差距明显,占全球专利数量的14.62%,但与其他国家相比有一定优势,专利数量远远超过排名第3位的韩国,是韩国专利数量的2倍多。手术机器人领域的主要技术发源地以欧美发达国家为主,亚洲的研究实力也不逊色,中国、韩国和日本在该领域也占据较重要地位(如图4所示)。

图4 手术机器人领域排名前10位的技术发源地示图
(3)专利目标市场。专利申请的国家和地区通常是产品的销售地,即目标市场。有近20个国家和地区是目标市场,通过手术机器人专利的全球分布图可以整体把握市场分布情况。手术机器人领域目标市场的全球分布如图5所示。

图5 手术机器人领域目标市场全球分布图
(4)专利市场份额。在排名前10位的目标市场中,手术机器人领域的目标市场依次为美国、世界知识产权组织、中国、韩国、欧盟、日本、俄罗斯、德国、法国和印度。美国依然排在第1位,是全球专利布局数量最多的国家;世界知识产权组织的国际专利申请位于第2位,表明各国都在争夺手术机器人领域的国际市场;目标市场分布显示,亚洲在全球份额中占23.00%,超过1/5,中国是亚洲最主要的目标市场,其次是韩国和日本,此外还有印度(如图6所示)。

图6 手术机器人领域排名前10位的目标市场份额示图
2.4 竞争对手
在手术机器人领域专利申请数量中有4家专利权机构专利数量相同,因此选择排名前22位的专利权机构进行分析(如图7所示)。
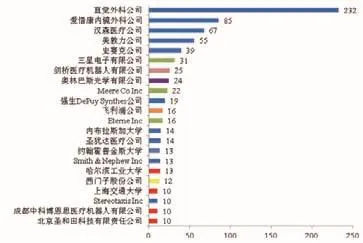
图7 手术机器人领域专利申请数量排名前22位专利权机构示图
在22家专利权机构中,美国有11家,占50%,表明美国在手术机器人领域的技术创新活动十分活跃,在全球中引领这个行业的发展。美国的11家专利权机构包括9家公司和2所大学,表明美国企业在技术创新活动中发挥重要作用,是技术创新的主导力量,且11家机构的专利数量之和占全球手术机器人领域专利总量的37.36%,超过全球总量的1/3,体现出美国雄厚的技术实力。11家机构中,9家公司专利申请数量分别为直觉外科公司232项、爱惜康内镜外科公司85项、汉森医疗公司67项、美敦力公司55项、史赛克公司39项、强生DePuy Synthes公司19项、圣犹达医疗公司14项、Smith & Nephew公司13项以及Stereotaxis公司10项;2家大学分别是内布拉斯加大学14项和约翰霍普金斯大学13项。美国的直觉外科公司在排名前22位的机构中专利数量遥遥领先,占美国在该领域专利总量的36.02%,超过1/3,是手术机器人领域的领军企业。
排名前22位的专利权机构中,中国有4家,专利数量分别为哈尔滨工业大学13项、上海交通大学10项、成都中科博恩思医疗机器人有限公司10项以及北京圣和田科技有限责任公司10项。4家机构占中国在该领域专利数量的19.72%。中国的技术创新机构类型以高校为主,但企业已经开始崭露头角。中国专利数量最多的机构是哈尔滨工业大学,是中国医疗机器人产业的人才摇篮。哈尔滨工业大学设有机器人技术与系统国家重点实验室,是我国最早开展机器人技术研究的单位之一,将产、学、研很好的结合在一起。哈尔滨工业大学是国内医疗机器人研发的佼佼者,其研发产品涉及到手术、康复、服务以及辅助各种类型机器人,基本代表了国内医疗机器人的最高水平。2013年12月,由哈尔滨工业大学承担研发的中国国家“863”计划资助项目——“微创腹腔外科手术机器人”成品正式通过验收。该手术机器人的问世打破了该领域中国进口美国“达芬奇手术机器人”的技术垄断,为中国外科手术加入国产手术机器人奠定“基石”[14]。此外,上海交通大学在医疗机器人领域的技术实力也不容小觑。上海交通大学于2017年12月21日成立医疗机器人研究院,是校级医工(理)交叉平台,由上海交通大学生物医学工程学院牵头校内医、机、电、材、物、数等多个学科。研究院的目标围绕“健康中国”国家重大医学需求,发展个性化、智能化及微创化的医疗机器人前沿技术,开展跨学科前沿创新研究,建设国际一流的医疗机器人核心技术研发平台,支撑中国医疗机器人产业关键技术转化,打造具有国际影响力的医疗机器人前沿研究的大师荟萃地和产业创新转化的人才集聚地,打造政、产、学、研、医用“创新链条”,支撑上海具有全球影响力的科创中心建设。中国在手术机器人领域的2家企业中,成都中科博恩思医疗机器人有限公司为国内领先医学机器人及自动化设备研发制造商,是集医疗器械研发设计、生产销售及服务为一体的高新技术企业。公司先后与国内外一流科研机构、研究型大学以及医学中心建立了多边战略伙伴关系,长期专注手术机器人及医学辅助机器人系统解决方案的研发与生产。经过多年的发展,形成了跨学科、跨机构及跨国界的协同创新体系,在机械结构、手术器械等核心技术领域拥有多项自主知识产权,产品涵盖微创机器人外科、自动化医学影像诊断、医学大数据服务等多项技术领域。公司以医学机器人产业化为核心发展理念,全力推动国产化微创手术机器人的研发、制造、临床及市场应用。
韩国有3家机构跻身排名前22位的机构,均是企业,专利数量分别为三星电子有限公司31项、Eterne公司22项和Meere Co公司16项,3家机构数量占韩国在该领域专利数量的76.67%,垄断了本国大部分市场。日本的奥林巴斯光学有限公司、荷兰的飞利浦公司以及德国的西门子公司等都是手术机器人领域非常知名的企业。国外主要以企业为主,体现了国外企业雄厚的研究实力,这也印证了国外科技创新的主体是企业。
2.5 技术竞争态势
2.5.1技术构成
通过揭示手术机器人专利的具体技术分类,以识别其技术研究的分布情况。国际专利分类(international patent classification,IPC)是一种国际公认的专利分析系统,IPC代码以功能分类和应用分类相结合[15]。通过对手术机器人专利的国际分类号进行分析,来反映技术的集中点和研究热点,从而掌握技术构成和技术现状。在11个IPC中专利数量排名前10位的见表1。
11个IPC的专利数量较为悬殊。排在第1位的是A61B,专利数量占据绝对优势,有1179条记录,其含义是“诊断、外科和鉴定用的仪器、器械和方法”,在手术机器人领域主要是涉及医学影像采集的内窥镜相关技术。内窥镜是手术机器人的重要组成部分,内窥镜手术辅助机器人可模拟手指、肘关节等多个部位的功能,灵活地避开肋骨等障碍物进行手术,提高手术精确度[16]。因此,内窥镜是手术机器人的重要技术构成。A61B的专利数量远远超过其他IPC的专利数量,表明内窥镜是手术机器人领域最主要的技术研究方向。
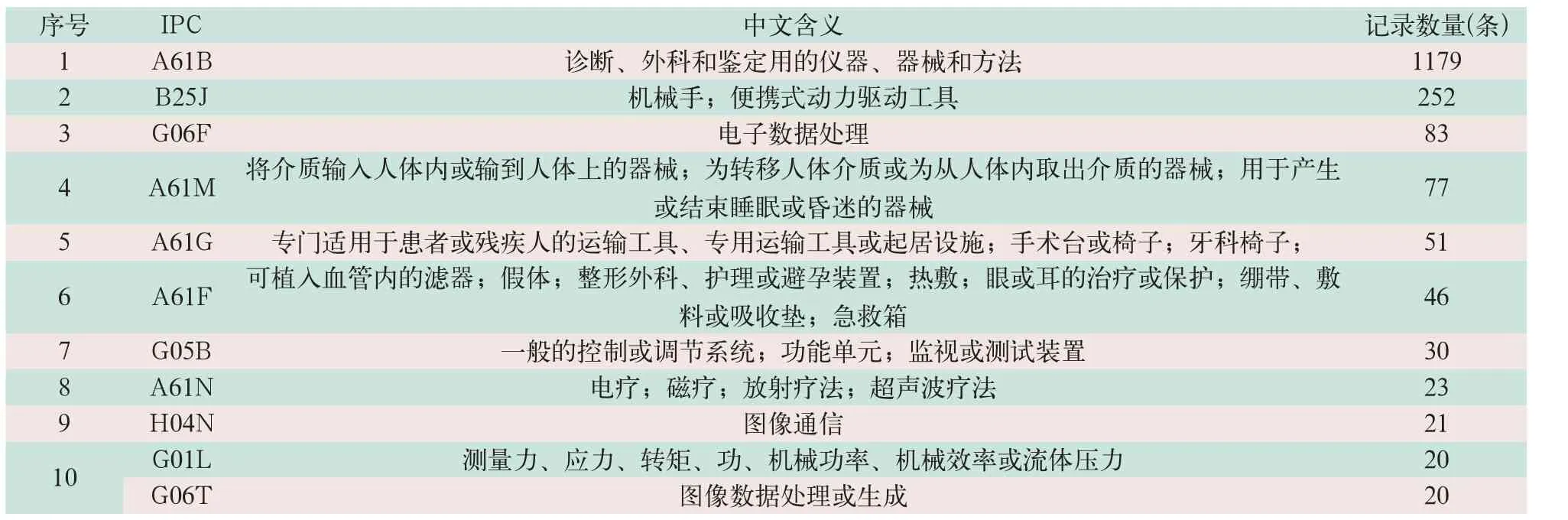
表1 手术机器人专利数量排名前10位的国际专利分类号
专利数量排在第2位的是B25J,有252条记录,其主要含义是“机械手”,包括操纵工具、装置或机械,涉及的技术点有机械手的种类或型式、微型机械手、程序控制机械手、控制装置、安全装置等[17]。B25J主要是微创外科手术机器人的重要技术点,主要涉及操作手的技术。微创外科手术机器人系统主要由主操作手、从操作手及控制系统组成,操作手的运动学正逆解是对外科手术机器人进行研究的关键技术之一。
此外,手术机器人的技术构成还包括电子数据处理系统、介入、植入相关设备、调控系统、图像处理及传输、应力及扭矩等技术。
2.5.2技术趋势
在排名前10位IPC的专利申请数量年度分布中,A61B(内窥镜)专利数量优势明显,专利年度申请数量也远远高于其他技术领域,领先优势非常明显。手术机器人领域最早有专利申请和涉及A61B(内窥镜)专利最早的均在1994年。在排名前10位IPC中,1994-2001年间,该领域只有A61B(内窥镜)技术。从2002年其他技术构成开始陆续出现。A61B(内窥镜)于2015年达到第一个峰值,有91条记录,此后专利数量稍有回落;2008年又进入一个快速增长时期,2016年达到峰值,有152条记录。从A61B(内窥镜)的专利数量年度分布可以看出,A61B(内窥镜)是手术机器人领域最主要的技术点,从2001年后,每年都有A61B(内窥镜)的专利申请,呈现连续发展状态。此外,B25J(机械手)从2002年后呈现连续申请状态,表明从2002年开始“机械手”一直是手术机器人的研究热点;G06F(电子数据处理系统)、A61M(介入设备)和A61F(植入设备)从2003年后也呈现连续申请的状态,表明这几个技术点也是在手术机器人领域非常重要的技术研究方向。
3 结论
通过对手术机器人专利进行分析发现,其技术发展呈现以下特点。
(1)手术机器人处于快速稳定的发展时期。专利申请数量呈现逐年上升的趋势,表明近年来技术发展较为迅速。手术机器人的专利公开态势表明近年该领域发展十分迅速,技术发展将迎来新的时期。从技术生命周期来看,手术机器人领域处于技术发展的成熟期。
(2)手术机器人技术发源地和目标市场以中国和美国为主,同时国际市场也是各国争夺的重要目标;国外研发机构主要是以企业为主,而中国则是高校为主。
(3)手术机器人专利最重要的技术研究方向是“内窥镜”,是最早的技术点,同时也是一直最受关注的技术点;此外,“机械手”也是手术机器人领域重要的技术构成,近年发展十分迅速,受到广泛关注。
通过对手术机器人专利进行分析,并结合可视化进行深入全面研究,有助于了解手术机器人领域的全球竞争态势,立足我国现状,从情报学角度提供基于数据和事实的研究证据,为我国手术机器人领域研发提供新的研究视角。
