智能小车红外线避障电路设计
2018-07-12王奇陈玉玲沈阳工学院信息与控制学院
王奇 陈玉玲 沈阳工学院信息与控制学院
1 前言
该设计以两个直流电动机为主动力源进行驱动。电机驱动电路采用TL298N驱动芯片,通过红外传感器来采集信息,并送入主控单片机(AT89C51)进行处理,数据处理完成后执行相应动作,以达到自动控制的目的。本设计中避障模块采用红外线收发来完成,由控制单元处理数据后执行相应动作,实现了无人干预也可完成一系列动作的功能。
2 设计思路与设计方案
2.1 设计思路
此项目最终目标为实现小车沿直线行驶,当探测到前方有障碍时停止,在后退,然后右转,最后继续前行。实现智能化无人干预操作。
2.2 设计方案与框图设计
本设计以单片机AT89C51作为检测和控制中心,采用红外光电开头来探测障碍物。实现预期效果。智能红外避障设计框图如图1所示:
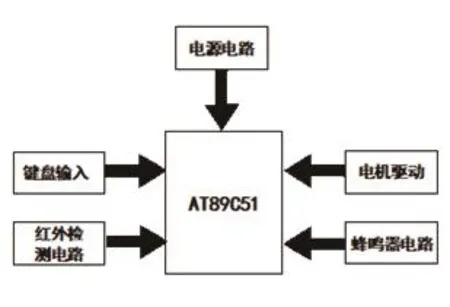
图1 智能红外避障设计框图
3 系统硬件组成及设计原理
本系统硬件部分由单片机单元,红外传感器单元,电机驱动单元,蜂鸣器单元,键盘输入单元及电源单元组成。各部分原件电路图设计分析如下。
3.1 单片机单元
图2所示为单片机单元电路图,其中采用的单片机为AT89C51。
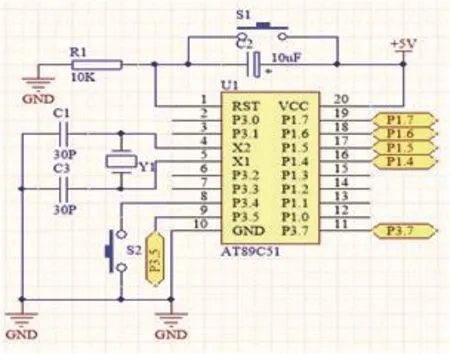
图2 单片机原件电路设计
本系统采用AT89C51单片机作为中央处理器,主要任务是扫描键盘输入的信号启动小车,P3.5为判断前方有无障碍物,并执行相关动作。当P3.5=0时,前方有障碍;当P3.=1时,为前方无障碍物。P1.4—P1.7是电机驱动口;P3.7是蜂鸣器信号输出;P3.5为红外传感器接口。
3.2 红外线传感器单元
红外线传感器单元采用了发射/接收一体化的红外光电开头,型号采用E3F-DS30C4,红外线传感器单元电路图如图3所示:
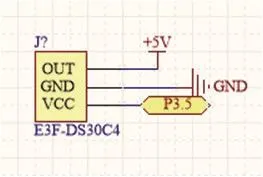
图3 红外线传感器单元电路图
3.3 蜂鸣器单元
设计的蜂鸣器单元为上电蜂鸣,按启动按键和有障碍物时蜂鸣一次,由三极管,蜂鸣器和电阻组成。其供电电压为5V,设计电路图如图4所示:

图4 蜂鸣器电路
3.4 电源电路
系统采用两组电压供电,电机驱动电压为+8.4V,单片机供电为+5V。L239D及蜂鸣器电路等。设计电路如图5所示:
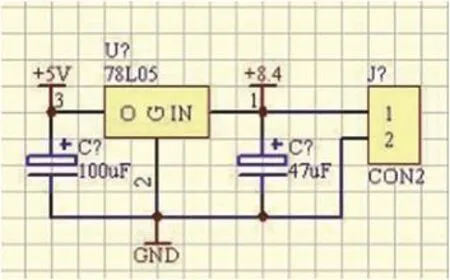
图5 电源电路设计电路
4 总结
智能化有很大发展空间,将AT89C51编入需要的程序,实现需要的功能。此设计提出实用的智能小车设计方案,提供硬件设计电路,利用AT89C51单片机作为主控芯片,实现小车避障功能。作为未来学习智能化发展做铺垫。