脉冲激光测距误差分析及精度提高改进方法
2018-07-11于玉亭涂德凤
于玉亭,涂德凤
(安徽新华学院 电子通信工程学院,安徽 合肥230008)
激光具有单色性、相干性、方向性和高亮度的特性,且有定距精度高、抗电磁干扰能力强等优点[1]。因此,激光技术在如激光测距、激光测速、激光成像等许多领域都得到了广泛的应用。由于回波信号的强度和所探测目标的特性有关,而且即使是同一目标、同一距离,若目标和光路的夹角不同,回波的强度也不相同,这就导致经过光电转换后的脉冲回波信号的形状和幅度有很大差异。目前,在脉冲激光测距中主要采用的是固定阈值判断电路,但这种电路会因回波幅值的变化引起转化后的数字脉冲前沿时刻变化,引入比较大测距误差[2-6]。本文在分析脉冲激光测距误差产生原因的基础上,通过计算出的激光发射频率、电容充放电时间、A/D采样时间等参数来设计高精度峰值跟随电路,并针对脉冲回波信号的特点设计软件滤波算法来减小测距误差。
1 误差来源及分析
根据激光探测距离方程,激光接收机的回波信号幅值电压表示为

其中:PT为发射功率;R为激光测距仪与目标间的距离;θ为激光光束与目标法线间夹角;为接收光学系统透过率;为发射光学体统透过率;ρ为目标反射率;Ar为接收机有效接收孔面积,为接收孔径;η为双程大气透过率,与激光波长和大气能见度有关;为探测器的响应灵敏度。探测器测试示意图如图1所示。
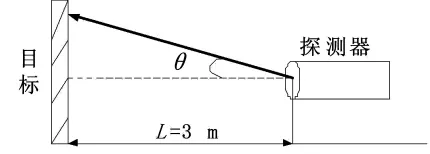
图1 探测器测试示意图
不同目标(土地、沙漠、灌木丛、雪地、水面)的光学反射特性差异很大,且随着激光探测器发射光束与目标法线间夹角的不同,目标的反射率也有很大的差别[7],如表 1 所示。
根据表1中的数据,最大反射率和最小反射率的比值为0.67/0.05=13.4。假设目标具有漫反射特性,当激光光束与目标法线间夹角从0°增大到60°时,由式(1)可得:相同激光在目标为水面和黑橡胶时的回波幅值比为 13.4/cos 60°=26.8。
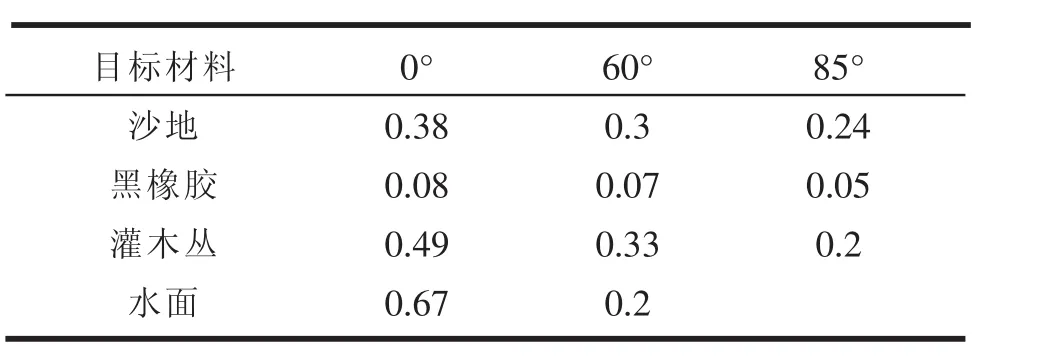
表1 各种目标在不同夹角下的反射率
在图2中,波形1和2分别为与激光探测器探测距离为3 m处的白板和黑板的回波波形,Vt为阈值触发电压。根据脉冲激光测距公式

计算出的3 m处白板距离L1为

其中:L为激光测距仪到目标的距离,c为光速,T为激光在探测器与目标间往返传输的时间,t1为探测器接收到3 m处白板回波信号的时间,t0为激光探测器发射的时间。
由式(2)计算出3 m处黑板的距离L2为

其中t2为探测器接收到3 m处黑板回波信号的时间。
由式(3)、式(4)可以得出:在同一距离下,因目标特性改变而产生的测距误差ΔL为

采用固定阈值判断的信号处理方法,目标反射率不同会引起回波信号在幅值和形状上有差异。从式(5)可以看出:测距误差大小由固定阈值判断电路产生的时间误差Δt决定,时间误差越大,测距误差就越大。

图2 固定阈值判断测距原理
激光回波信号可近似看作高斯波形,其前沿波形方程为

设激光回波信号延时为tdelay,则经过延迟后的波形方程为

由式(7)可知,当取 t=tdelay=ta+tb时,

这里,ta为系统器件延时时间,tb为激光光束在探测器与目标间往返的时间。
可以看出:在tdelay时刻,回波信号峰值与时间没有关系,即消除了由回波幅度变化引起的测距误差。
对同一探测器系统,器件延迟时间是固定的,激光光束在探测器与3 m处白板或黑板间往返时间是相同的,因此同一探测器的激光回波信号延时时间(tdelay)也是相同的。由式(7)可以看出:在tdelay时刻,3 m处的白板和黑板均会产生回波峰值信号,峰值信号的大小由回波信号衰减系数决定。如图3所示,波形1为3 m处白板的回波信号,在tdelay时刻峰值电压为Va;波形2为3 m处黑板的回波信号,在tdelay时刻峰值电压为Vb。根据峰值阈值原理,由于回波峰值与时间没有关系,通过设计峰值跟随电路进行峰值阈值判断,就能减小回波信号因幅值和形状差异使阈值判断电路产生的时间误差,从而减小测距误差。

图3 峰值阈值判断测距原理
2 电路及软件滤波实现
根据上述分析,采用固定阈值判断方法的测距误差受延迟时间误差影响,时间误差越大造成的距离判别精度就越低。为此,我们根据峰值阈值判断原理,提出了回波峰值阈值判断方法并设计了峰值阈值判断电路。这部分主要由峰值跟随电路、软件滤波和辅助电路组成。
2.1 峰值跟随电路
如图4所示,峰值跟随电路主要由放大电路、充放电控制回路和射极跟随电路构成。
1)放大电路。激光回波信号是微弱信号,其幅值一般约为几十毫伏,而一些目标的反射特性差,回波信号幅值会更小,不利于系统对回波信号峰值的存储和采样,因此需要对初始回波信号进行放大。放大电路主要由放大器U2、反馈电阻R4和R5构成。调节反馈电阻R4和R5的阻值,选择合适的放大比例,即可实现对回波信号进行无失真放大。
2)充放电控制电路。充放电控制电路由三极管Q1、电阻R7和R8、充放电电容C5组成。放大后的回波信号经二极管D1给电容C5充电。通过调节发射周期和C5电容值的方法可保证在一个发射周期内完成回波信号峰值电压的存储和释放。
峰值跟随电路各时间窗口参数计算如下。
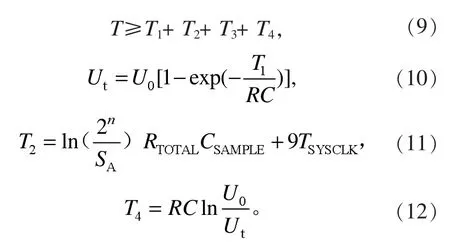
其中:T为脉冲激光发射周期,T1为存储回波信号峰值的时间,T2为采集和保持回波信号峰值电压的时间,T3为系统固定延迟时间,T4为电容C5完全放电时间,Ut为电容C5充电后电压,U0为电容C5充电前电压,R为充放电回路等效电阻,C为充放电回路等效电容。T2由外围处理器系统时间(TSYSCLK)、晶振频率及AD采集芯片的采样精度(SA)、采集回路等效电阻(RTOTAL)及等效电容(CSAMPLE)共同确定。
3)射极跟随电路。射极跟随电路用于前后级间的电路阻抗匹配,由Q2、R9和R10组成。R9和R10组成的分压电路将峰值电压按比例缩小后送至单片机进行A/D 采集。
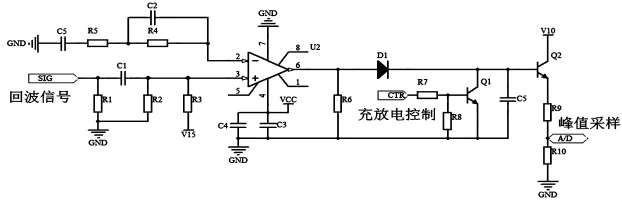
图4 峰值跟随电路的设计
2.2 软件滤波
由于激光探测器在测距过程中受到背景干扰及系统噪声影响,回波信号幅值会出现阶跃性的跳变,而这些跳变容易让探测器产生虚警判断,故在发射周期内,处理器需要对峰值跟随电路采集到的信号进行软件滤波,剔除信号中的阶跃性杂波。
在激光探测器逐渐接近目标的过程中,回波信号的幅值会随距离减小而逐渐增大,因此我们采用限幅平均滤波法。具体步骤如下。
1)对每次采样到的数据都进行限幅和时间窗口判断处理。设Dn为第n个数据,tn为采样到第n个数据的时刻,只有当Dn≥Dn-1且tn≥tn-1时Dn才记为有效数据。
2)将采样到的有效数据放入队尾,并去掉原来队首的一个数据(先进先出原则),再对队列中的n个数据进行算术平均运算,获得新的峰值电压。
限幅平均滤波方法对阶跃干扰信号有良好的抑制作用,使滤波后的脉冲峰值数据平滑度升高,大大方便了后续信号处理。
2.3 辅助电路
在图5中,调整R21、R22的阻值可选择合适的电压放大倍数。滤波后的数据经数字调制后送入放大器U2B,放大后的回波峰值电压信号送入比较器U1的3号引脚,比较器的4号引脚接输入回波信号,当回波信号幅值达到并超过峰值电压时,比较器输出高电平,实现回波信号峰值跟随功能。

图5 辅助电路的设计
2.4 实验结果
在静态条件下对所设计的电路进行了测试,示意图见图1。目标和激光探测器间距离为3 m,改变夹角θ,测量激光在3 m内往返需要的时间。通过示波器测量得到的数据如表2所示。
从表2可以看出:在固定阈值比较方式下,灌木丛、沙地、黑橡胶在 0°、65°、85°三种条件下最大时间误差 Δt分别为 1 ns、1.2 ns和 1.3 ns,由式(5)计算得到对应的测距误差分别为0.15 m、0.182 m和0.197 m;在峰值跟随方式下的最大时间误差分别为0.3 ns、0.4 ns和0.2 ns,由式(5)计算的对应的测距误差分别为0.045 m、0.061 m和0.03 m。可以看出:采用峰值跟随方式时间误差较小,且这些误差主要由硬件系统器件时间延迟和测量误差引起的,可以通过元器件筛选和采用更高精度的测量仪器来减小。因此峰值跟随方式下的测距误差相应较小且可控。
3 结论
在对脉冲激光测距误差来源进行分析和对固定阈值判断测距原理进行研究的基础上,给出了一种回波信号峰值跟随阈值判断系统。结合激光回波信号的特点设计了峰值跟随电路、软件滤波和辅助电路。在静态条件下的测试结果表明:采用峰值阈值判断方法能提高激光测距精度,通过合理的设计和参数匹配将高速信号采集转换为在发射周期内对峰值电压的低速采集,避免了高速A/D芯片和处理器的选用。研究工作对激光测距系统的高精度、低功耗、低成本设计有一定的借鉴意义。
