基于STM32的家庭看护助手
2018-07-10李芳芳
李芳芳
【摘 要】针对当今社会的家庭结构,孩子数目增多,老人平均年龄偏大,家庭的主要劳动力忙于工作,为了减轻中年夫妇照看孩子看管老人的负担,提出了基于STM32芯片的家庭看护机器人,通过Zigbee进行数据的无线传输,方便上位机进行实时的监控,可以很好的辅助家长照看孩子和老人。
【关键词】STM32,机器人,Zigbee
一、引言
随着科技的飞速发展,我们的生活也逐渐趋近于自动化、智能化,近几年,各种类型的智能扫地机器人层出不穷,智能教学机器人也入住了各个家庭,这些智能机器人着实给人们的生活学习带来了意想不到的便捷,在二胎政策的鼓励下,现在一个家庭的孩子数目以2作为基数在增加,与此同时我们国家的人口比例趋于老龄化增长的模式还在持续,这就导致家庭的主要生产力即家庭的中年夫妇需要陪伴孩子成长的同时要照顾看管好老人的起居生活,为此提出了一种基于STM32芯片的家庭看护机器人的设计,方便中年夫妇在工作之余可以对家人实时的监护,预防突发情况无法知晓的悲剧发生。
二、家庭看护机器人的整体结构设计
感知节点包括红外热像仪、超声波避障模块、高清可见光摄像机、红外光电避障传感器以及温湿度传感器和其他相关的扩展模块。通过以上多源信息采集的感知节点,机器人可以实时的获取家里的多种信息,通过红外热像仪和高清可见光摄像机可以随时了解家人的活动范围和身体运动信息,同时温湿度传感器又可以对家里的温湿度情况做一个实时的反馈,便于主人对家用电器进行远程调控以此为家人提供更加舒适的生活成长环境。
感知节点获取的信息通过无线网络传至上位机。控制节点包括电路控制和运动控制,由信息采集电路,控制器,供电模块,驱动电路等构成。主要完成信息的分析处理,控制指令的制定。无线传输电路是机器人与上位机的信息传输的纽带,实现感知节点与控制节点的指令的传输。家庭看护机器人助手采用客户机/服务器的运行模式。客户端就是信息的获取者也就是家庭监护人,他们可以通过PC机在线监测家庭的一些基本情况,并且可以面对突发情况发送一些控制指令,操控机器人实现突发情况下的一些动作,家庭看护机器人,则是对家庭的生活环境尤其是家庭成员的活动状态进行实时的监控反馈,服务端在机器人身上设置,核心部分是STM32集中控制器,主要负责多源信息采集,定位导航确定方位和机器人自身的运动行走。
三、家庭看护机器人的系统设计
(一)机器人控制部分设计
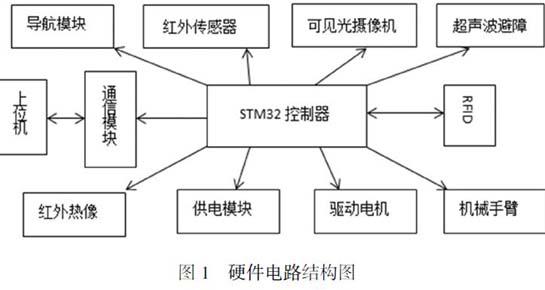
对家庭看护机器人控制器的开发中,选用TI公司STM32F103作为核心控制芯片,它的内核是ARM公司的Cortex—M3,工作频率为72MHZ、FLASH为512KB,有2个12位ADC,5个USART,12个16位计时器,资源完全满足机器人的运行需求,具有高效率、易扩展、实用性强等优点。家庭看护中心硬件电路结构图如下图1所示。
看护机器人控制电机、机械手臂及红外避障传感器进行控制。本系统采用由两片半桥驱动芯片和极低内阻的N沟道MOSFE组成的驱动器驱动两组电机。该驱动器可快速打开MOSFET沟道,提高了电机的加速曲率,使机器人迅速启动、迅速刹车和转向。集中控制器接收到PC端上位机发送的串口指令后,将串口指令转化为电源可以识别的PWM信号,从而调整电源的输出电流,控制电机的运行状态。集中控制器从上位机客户端接收到指令,并将其转化为PWM信号,控制伺服电机转动的圈数,从而决定机械手臂姿态位置。
(二)環境监测部分设计
温、湿度传感器 AM2320 完成室内温、湿度的检测,通过I2C接口完成与嵌入式控制器的通信;通过红外测距传感器 GP2D12 完成室内障碍物距离检测,数据直接通过嵌入式控制器 A/D 接口将数据送入控制器。
(三)无线通信模块的设计
无线通信控制中心模块与感知节点之间的通信通过ZICM2410 Zigbee 无线模块实现,该模块遵从 Zigbee规范和 IEEE 802.15.4 标准,内含有基带MODEM的射频收发器、硬连线的 MAC和内嵌8051 内核的微控制器(带有内部 Flash 存储器)组成,多个通用I/O 引脚、定时器、UART、SPI 以及硬件语音编解码器。
看护机器人的数据传输通过安装 OpenWrt的无线路由端使上位机客户端与服务端建立点对点的局域网来实现。采用 TCP/IP 通信协议,能够保证数据实时高速传输传输。红外热成像仪与可见光摄像机拍摄的视频信号经过压缩后通过局域网无线传输到达上位机客户端,图像经过解压显示在监控中心的屏幕上。红外热像图能够有效地检测出家人的运动状态。可见光摄像机拍摄的可见光图像与红外图像匹配、融合,能精确识别家人行动的范围。发现异常情况后,家庭监护人可以通过上位机客户端发送指令,控制数据通过 Socket发送到路由端,路由端把数据包解开后发送到路由端串口。集中控制器与路由端通过STM32 建立串口通信,从路由端发出的串口指令控制监控机器人实行预警方案,譬如发出警报声引起周围邻居或者路人的关注,实现在救护车或者专业医疗人员达到之前无人进行人工急救而引起的不必要的麻烦。
四、结语
家庭看护机器人采用客户端/服务端的运行模式,客户端位于监控中心的PC机上,负责实时显示家人活动场所的环境信息,以及家人活动的状态信息,家庭看护人也可以通过客户端上位机发送指令,控制巡检机器人对指定的家庭成员进行重点定点看护。服务端位于看护机器人本体,核心部分是STM32集中控制器,主要负责导航定位、机器人运动控制、多源信息数据传输等。使用者在管理界面可实现对家庭环境和家人的实时监控并且对智能设备的操作。为避免特殊情况下,周围没有人员参与急救,多提供了一重急救的保障。当然系统只是初步实现了一些看护、预警功能,还有待于进一步改进提高。
【参考文献】
[1]刘垂.自主移动机器人测控系统关键技术的研究.西安电子科技大学硕士学士位论文.2009.
[2]周立辉,张永生,孙勇,等.智能变电站巡检机器人研制及应用[J].电力系统自动化,2011,35(19):85 88.
[3] 杜艳,王者龙,杨杰,等.点对点红外通信装置的设计[J].电测与仪表,2015,52(7):97-100.
[4]王一.工业机器人视觉测量系统的在线校准技术[D].机器人,2011.
[5]常庆凯.带操作臂的小型移动机器人系统 [D]. 哈尔滨工业大学 ,2016(03).
