基于北斗卫星导航系统的差分定位技术性能分析
2018-07-10庄皓玥原彬张睿
庄皓玥,原彬,张睿
(中国电子科技集团公司第二十研究所,西安 710068)
0 引言
目前,世界上最为成熟的卫星导航系统为美国的GPS,我国的北斗、欧洲的伽利略等卫星导航系统都在快速的建设发展中。无论是GPS、北斗还是伽利略系统,它们的定位原理相同,都是利用用户测量到多颗卫星的距离进行定位。
传统的单点定位精度在米级甚至十米级以上,为提高卫星导航系统的定位精度,满足用户对高精度定位的需求,差分技术应运而生。依据修正信息种类的不同,差分技术可分为位置差分、伪距差分及载波相位差分三种。就定位精度而言,前两种差分方式的定位精度为米级或分米级,而载波相位差分的定位精度可达到厘米甚至毫米级。
本文介绍了伪距差分及载波相位差分定位技术的基本原理,建立了其模型,搭建基于北斗导航系统的动态跑车试验平台,通过开展大量的动态跑车试验,对不同定位算法的精度进行了分析比较,试验结果表明,载波相位差分技术可大幅提高北斗卫星系统的定位精度。
1 卫星导航差分技术原理
1.1 北斗定位的主要误差源
用户接收到的北斗导航信号包含多种误差,可分为空间部分误差、传播路径误差及用户部分误差三部分。其中空间部分误差分为卫星时钟误差和卫星星历误差,传播路径误差分为电离层误差和对流层误差,用户部分误差分为多径误差和接收机噪声误差[1]。表1是现代民用接收机C/A码伪距误差分配的估计值。

表1 不同误差源对伪距测量值的影响
1.2 差分工作原理
由于上述误差的存在,卫星导航系统在定位过程中存在较大的定位误差,单点定位的精度不高,无法满足高精度应用场景的需求。针对此类应用,通常采用差分技术来提高定位精度,其技术原理如图1所示。
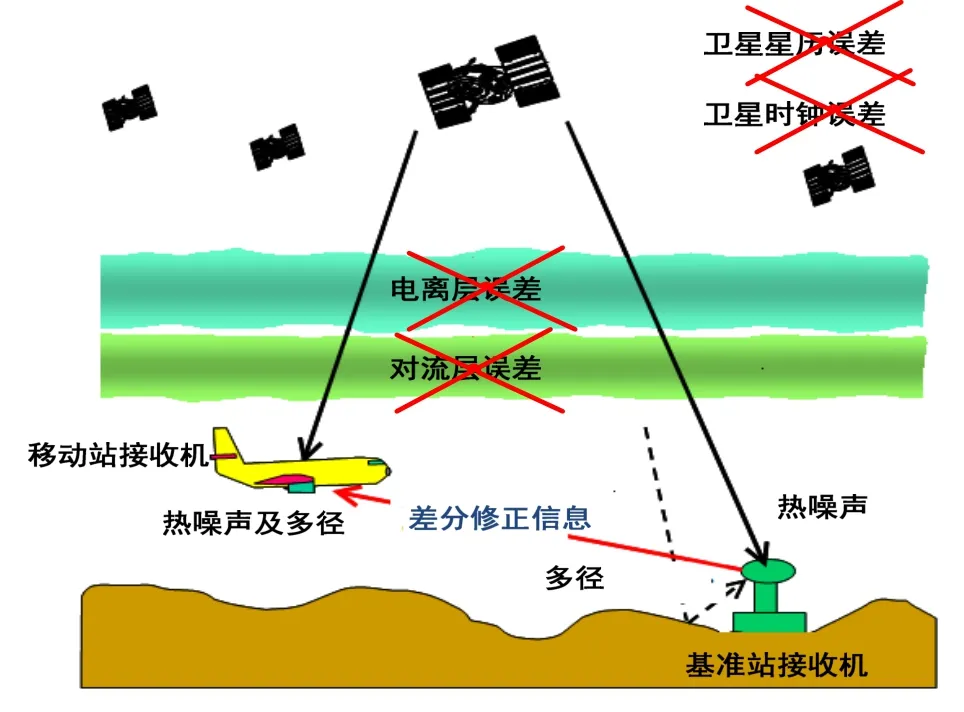
图1 差分技术原理示意图
差分技术利用两台接收机(一般称为基准站接收机与移动站接收机)同时观测卫星信号,利用误差的空间相关性(即在一定基线距离条件下,两台接收机所观测的同一颗卫星其误差基本相同)进行差分计算,有效地消除或降低两站接收机间的公共误差部分,包括星钟误差、星历误差、电离层误差和对流层误差, 从而提高了接收机定位精度。
1.3 差分技术分类
根据予以差分校正的目标参量不同,差分可主要分为位置差分、伪距差分、载波相位差分三种,本文主要介绍后两种差分技术[2]。
1.3.1伪距差分技术
·基本原理
(1)基准站接收机通过卫星信号解码得到伪距测量值;
(2)利用基准站的已知坐标及卫星星历信息,可计算出基准站到卫星的真实几何距离,求出该距离与伪距测量值的差值即伪距测量误差;
(3)基准站利用数据链将此差值发送给移动站接收机,移动站接收机利用此差值修正其伪距,再进行定位解算,获得其位置。
·应用特点
(1)目前应用最广的差分技术,几乎所有的商用差分接收机均采用此技术;
(2)随着移动站和基准站之间距离的增加,定位精度下降。
1.3.2载波相位差分(RTK)技术
由于码相位的测量精度在1m左右,载波相位测量值的精度可达几个毫米,因而基于载波相位差分系统通常具有最高的定位精度,可用来实现精密定位。
·基本原理
(1)基准站通过数据链将载波相位测量值实时发送给移动站接收机;
(2)移动站接收机将自身的载波相位测量值与所接收的载波相位测量值经差分运算组成差分测量值;
(3)求解出初始整周模糊度以及基线向量,以完成高精度定位。
·应用特点
(1)载波相位差分的定位精度可达到厘米级甚至毫米级;
(2)由于误差空间相关性的限制,基准站与移动站在短基线范围内效果较好。
2 差分的模型
2.1 伪距差分的模型
利用基准站的已知坐标和卫星星历可计算出基准站到卫星的几何距离基准站和卫星间的伪距观测值可表示为[3]

其中:δbt为基准站钟差,δts为卫星钟差,为星历误差,为电离层时延误差,为对流层时延误差,δbM为多径误差,Vb为基准站噪声误差。

同理,移动站接收机和卫星的伪距测量值suρ可表示为:



经伪距修正后的移动站基本可消除测量值中空间相关性较强的电离层时延、对流层时延、卫星钟差和星历误差,可通过多颗卫星经差分校正后的伪距实现定位,因此比单点定位具有更高的精度,可达到米级或分米级。
2.2 载波相位差分的模型
载波相位差分处理过程涉及载波周跳检测与修复、整周模糊度浮点解求解、整周模糊度搜索、整周模糊度正确度检验四项处理过程。对于处于动态的移动站来说,快速、准确的求解出整周模糊度是完成实时定位的关键。针对此问题,本文处理的具体过程如图2所示。为了消除测量值中接收机钟差和卫星钟差的影响,基准站接收机和移动站接收机的观测量在地面和空中各求一次差分,建立载波相位和伪距的双差观测方程:

式中:Φ为载波相位双差观测向量,P为伪距双差观测向量,nR为移动站与基准站接收机之间的基线向量,ε为载波相位双差观测噪声,εP为伪距双差观测噪声,λ为波长,G为观测矩阵,N为整周模糊度。

图2 载波相位差分技术原理
为保证载波相位测量值的连续可用性,首先采用无几何距离组合法进行载波周跳检测与修复[4]。然后结合载波相位和伪距的双差观测方程,忽略模糊度的整数约束,使用最小二乘法求得基线向量Rn及模糊度浮点解N。根据模糊度浮点解使用LAMBDA算法[5]实现整周模糊的固定。当求出整周模糊度最优整数解N∩后,可求解出基线向量的最优解,在基准站位置已知的情况下可得移动站的精确位置。
3 跑车试验分析
3.1 动态试验平台
为了验证基于北斗卫星导航系统的差分定位精度,搭建了动态跑车试验平台,如图3所示,开展动态跑车试验,对单点、伪距差分和载波相位差分三种模式定位精度进行分析。在试验时选择开阔无遮挡的试验场地,将基准站接收机天线固定在某一坐标精确已知的点,移动站接收机天线安装在动态的试验车平台上。
基准站和移动站开机预热,静止 10分钟后,承载移动站的车辆按照指定路线行驶,平均速度约50km/h,分别采用单点、伪距差分和载波相位差分三种模式进行定位,并分别记录三种模式下约半小时的数据。

图3 动态跑车试验平台
3.2 试验结果分析
单点、伪距差分和载波相位差分三种模式下的水平及垂直定位误差分别如图4、图5和图6所示,定位精度如表2所示。

表2 定位精度对比表

图4 单点定位误差

图5 伪距差分定位误差
图4为单点模式下北斗的水平和垂直定位误差。图5为伪距差分模式下北斗的水平和垂直定位误差。图6为载波相位差分模式下北斗的水平和垂直定位误差。
由表2可知,单点模式水平定位精度约为4.5m,垂直约为 5.3m,定位精度在米级以上,误差较大;伪距差分模式水平定位精度约为 0.7m,垂直约为2m,可以达到分米级,相比单点定位精度有了较大的提升;而载波相位差分模式水平定位精度为0.027m,垂直为0.032m,达到了厘米级,实现了高精度定位。
4 结论
本文针对高精度定位的应用需求,在北斗卫星导航系统中采用伪距及载波相位差分技术进行定位,并通过跑车试验对差分系统的定位精度进行分析。试验结果表明,伪距差分水平定位精度优于0.7m,垂直定位精度优于 2m,而载波相位差分定位精度优于4cm,由此可见,载波相位差分技术明显提高了定位精度,可满足高精度定位的需求,具有很大的工程应用价值。
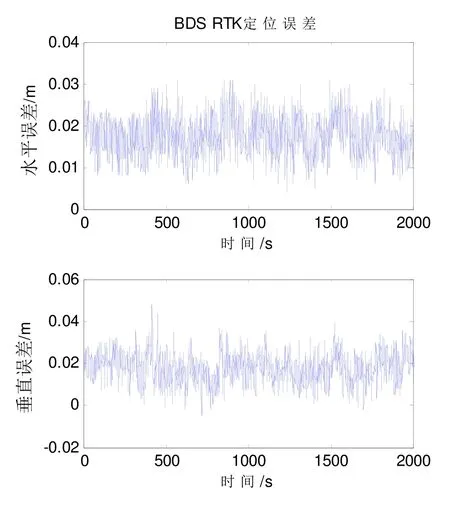
图6 载波相位定位误差