基于C型行波法的电气化铁路牵引网故障测距研究
2018-07-09
基于C型行波法的电气化铁路牵引网故障测距研究
刘 浅,黄海浪
针对目前电气化铁路牵引网故障测距方法精度不高的问题,根据牵引网特点将行波法应用于牵引网故障测距中,建立基于A、B、C型行波检测装置的3种牵引网模型,针对有站场和无站场2种不同工况进行仿真,对比分析不同型号行波检测装置的检测精度,并给出以C型行波法判断为主,A、B型行波法判断为辅的牵引网故障测距方案。
故障测距;行波;电气化铁路牵引网
0 引言
电气化铁路牵引网是电气化铁路的重要组成部分,同时又是一个开放、复杂、受外界影响大的系统,在日常运行时难免会发生故障。牵引网发生故障时,能否准确判断故障点与牵引变电所之间的距离,并对故障位置进行精确定位,是影响电气化铁路安全运营及可靠供电的重要因素之一。准确、快速地进行故障定位可缩短抢修时间、减小故障影响范围、提高运输效率,对于电气化铁路,尤其是高速电气化铁路具有重要意义。
目前,国内电气化铁路故障测距装置多基于阻抗法,即通过计算故障发生时的线路电压、电流,计算得出故障电阻、电抗,进而可得出测距点到故障点的距离。基于阻抗法原理的故障测距虽能满足牵引网运行要求但误差较大[1],给故障修复带来很大困难。
行波法根据行波传输原理对牵引网进行故障测距,目前已在国内外高压、超高压、直流电力输电线路上成功应用。由于行波在线路中的传输速度固定,接近于光速,且测量的时间间隔不受线路类型、线路结构、系统运行参数、故障电阻及变换器变换误差的影响,因此行波法故障测距具备较高的精度与稳定性[2]。
1 行波法故障测距原理与方法
电气化铁路牵引供电系统中的牵引网是由平行多导体线路组成的输电网络,其电力参数沿线路均匀分布,起到传输电能的作用[3]。由于线路中存在均匀分布的电感和电容,线路发生故障时,故障点产生向线路两端传播的行波,且在传播过程中随输电线路参数和波阻抗的变化将产生反射和折射现象。行波测距即是利用故障网络的附加电源产生的行波在故障点与母线之间传输时间以及其他波阻抗的传播时间来实现对故障点的快速精确定位。
行波法故障定位方法主要分为A、B、C、D、E型故障测距法,该5种方法的共同点是通过测量故障行波的时间差对故障进行定位。其中,A型法利用单端被动电气量,B和D型法利用双端电气量,C型法利用单端主动电气量,E型法利用重合闸。另外,A、C、E型为单端测距,只需在线路一端设置测距装置;B和D型法为双端测距,需要进行两端通信对时。本文仅对A、B、C型3种主要行波故障测距法的原理进行介绍。
1.1 A型行波法
A型行波法利用故障点处产生的行波在测量点与故障点之间的往返时间与行波波速之积来确定故障位置。线路发生故障时,故障产生的电流行波(以下简称行波)在故障点与母线之间来回反射。装设于母线处的测距装置接收来自行波传感器二次侧的暂态行波信号,得到故障初始行波波头脉冲到达的时刻[4],故障初始行波脉冲与由故障点反射回来的行波脉冲之间的时间差D对应行波在母线与故障点之间往返一次的时间,可以用于计算故障距离。
以某一单相系统为例(图1),假定端为测量端。当线路内点发生故障,由故障点电压突变而产生的暂态行波将以速度(接近光速,具体取决于线路分布参数)从故障点向线路两端传播。设线路长度为,故障初始行波与由故障点反射波到达母线的时刻分别为s1,s2,则故障距离l为
l=·D/ 2 =· (s1-s2) / 2 (1)

图1 A型行波法故障测距原理
1.2 B型行波法
B型行波法利用故障点产生的行波到达两端的时间差与波速之积来确定故障位置[5],其中利用GPS提供准确的同步时间,测量误差在200~300 m以内[2]。其原理如图2所示。

图2 B型行波法故障测距原理
图2中,若点发生故障,所产生的故障行波向两端传播,经时间M到达点,经时间N到达点。设行波在馈线中传播速度为,则有


M= (+D) / 2 (5)
N= (-D) / 2 (6)
B型行波测距法利用故障点所产生的第一个故障行波进行定位,线路参数对故障波的影响较小,故障波形较真实。为同时进行线路测量,需要通过“对表”以统一线路两端的时间,而目前民用的GPS最小时间分辨率为1 μs,对应的最小测距误差在200~300 m,因而现阶段所有双端故障测距装置误差都在200~300 m范围内。
1.3 C型行波法
C型行波法是在保护装置切断故障线路电力供应情况下进行故障测距,可以反复进行测量。该方法不仅可利用高压发生器人为进行故障点再次击穿,复现故障,判断线路故障性质,还可利用故障行波准确定位故障点。与A、B型行波法相比,弥补了一次性且仅能进行一次测量、判断的不足。
在现代复杂电网中,任何一点的故障或操作都会在电网内产生各类行波,严重干扰了故障源的定位。A型及B型行波法难以对复杂的、为数众多的行波进行判别,从而可能产生误判。C型行波法的最大优点在于可灵活地将理论和经验相结合,反复进行比较,排除可能出现的干扰,正确判断故障性质和进行故障定位。此外,C型行波法不受GPS时钟分辨率的限制,配有采样频率为100 MHz的C型故障测距装置,对往返行波仅存在0.01 μs的理论误差,最高理论定位精度可达0.8~1.5 m,远高于双端测距装置200~300 m的定位精度。
2 牵引网行波故障测距仿真研究
2.1 牵引网仿真模型及相关参数
本文以Matlab软件为基础,搭建牵引网仿真模型,对比分析A、B、C型3种行波法在精确性上的差异。模型中牵引网采用分布参数的传输线,电阻0.1W/km,电感2.126 4 H/km,电容2.126 4 F/km,上下行线路各长45 km。牵引变电所采用单相交流电压源模拟,电压值为27.5 kV。模型中假设3列列车负荷,其中上行2列,下行1列,电阻均为10W,电感1.0 H。另外,将行波波速设为定值3×108m/s,变电所母线处故障定位装置的采样频率为10 MHz,共设置10 000个采样点。
2.2 无站场时牵引网行波故障测距仿真分析
无站场时牵引网的仿真模型如图3所示。
设置故障源位于牵引网下行馈线线路距牵引变电所母线15 km处。采用3次B样条函数作为小波基函数检测暂态电流的突变点[6]。A型法的仿真结果如图4所示。

图3 无站场时牵引网仿真模型
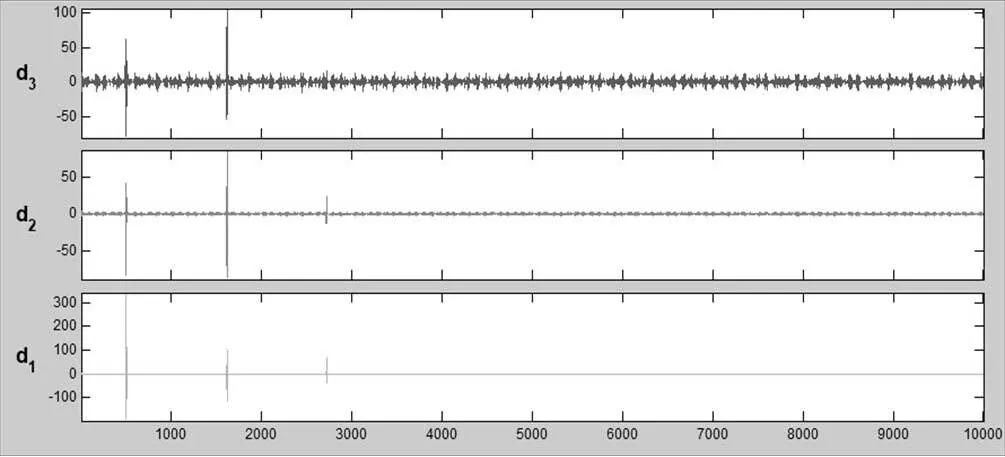
图4 无站场时故障距母线15 km A型法测量结果
此时A型法测得故障源位于距母线15.345 km处,误差约为2.3%。
B型法的仿真结果如图5、图6所示。

图5 无站场时故障距母线15 kmB型法近端测量结果

图6 无站场时故障距母线15 kmB型法远端测量结果
此时B型法测得故障源位于距母线15.262 km处,误差约为1.75%。
C型法的仿真结果如图7所示。

图7 无站场时故障距母线15 kmC型法测量结果
此时C型法测得故障源位于距母线15.061 km处,误差约为0.41%。仿真时所选的采样频率为 10 MHz,若采样频率提高,则结果更精确。
2.3 有站场时牵引网行波故障测距仿真分析
有站场时牵引网的仿真模型如图8所示。此时仿真波形及仿真误差均与无站场时类似,不再列举。

图8 有站场时牵引网仿真模型
对比有无站场2种工况下A、B、C型行波法的测量误差可知:A型行波测距法由于需要监测故障行波来回往返时间,期间故障行波易受其他杂波干扰,测量误差最大;B型行波测距法由于故障行波需要完成在上下行馈线上的传播,也易受到其他杂波的干扰,测量误差次之;C型行波法不易受到其他杂波影响且可重复测量,测量误差最小。
3 基于行波法的牵引网故障测距方案
基于以上分析,提出以C型行波检测为主,结合A、B型行波检测为辅综合判断的故障测距解决方案[8]。该方案的牵引网故障判定装置接线原理如图9所示。
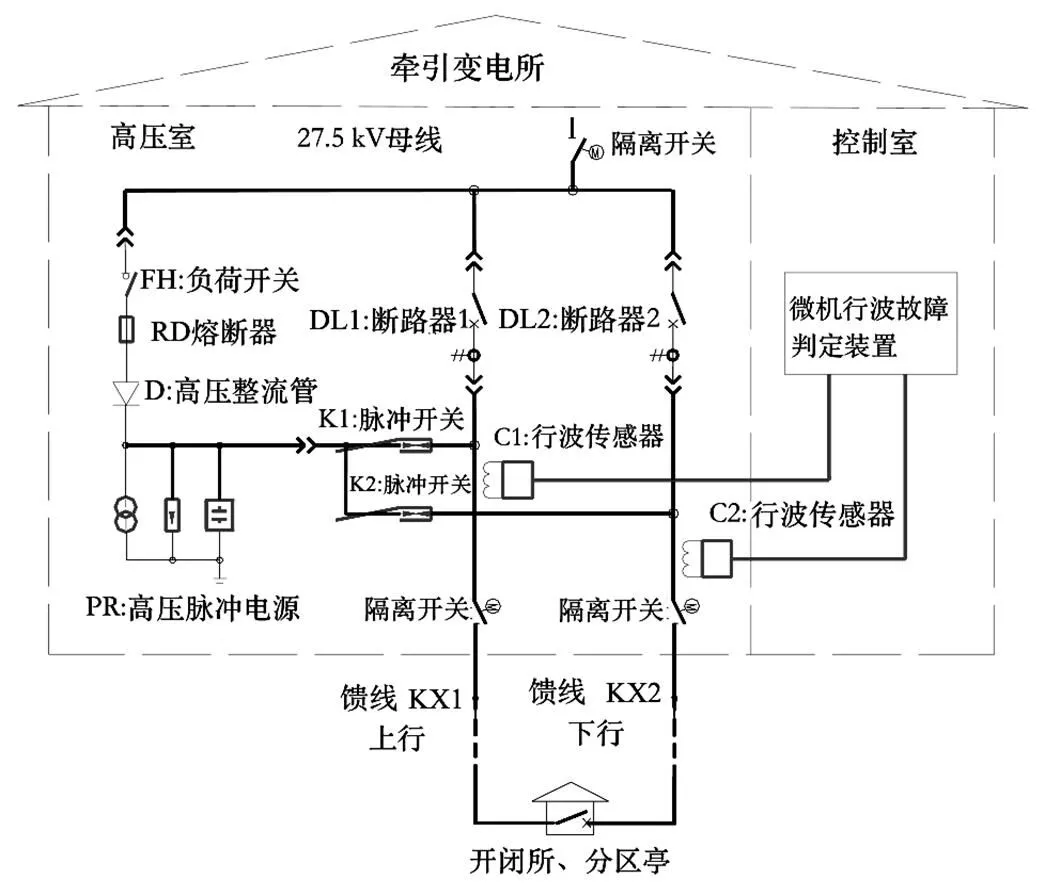
图9 牵引网故障判定装置接线原理
电气化铁路牵引变电所每个供电臂有上行KX1、下行KX2两条接触网馈线,在远离变电所的接触网末端由分区所用G开关将该2条馈线连接。本故障测距方案根据牵引变电所中同一供电臂的上、下行馈线在开闭所相连接的特殊方式,在变电所一端加装行波故障判定装置,利用同一台设备的同一时钟系统对上、下行馈线进行行波法测距。在每个接触网馈线出口处分别安装高压行波传感器C1和C2、……;这些行波传感器全部接入牵引变电所内采用统一时钟的接触网行波故障判定装置。具体故障测距过程如下。
接触网正常送电时开关G1为合闸状态,当接触网发生故障时,产生的故障行波会分别沿上行KX1、下行KX2接触网馈线传播到在接触网馈线出口处设置的高压行波传感器C1和C2处。故障判定装置首先采集到来自C1、C2两端的初始行波波头信号,稍后在C1和C2处采集到由故障点反射回来的故障行波信号,此时测距装置将分别按照B型行波法处理最先到达C1和C2处的一对初始行波信号,给出B型行波法的故障测距结果。然后再按照A型行波法分别单独处理C1或C2上第一个行波波头信号和由其在故障点反射回来的行波信号,并给出A型行波法的故障测距结果。
然后,故障线路的断路器受馈线保护装置控制自动跳闸,相应的接触网馈线失电,接触网末端开闭所的开关G1随之自动断开,此时故障判定装置自动启动C型故障判定方法。C型行波法的检测过程:当接触网发生故障,馈线断路器DL经继电保护动作跳闸后,装置负荷开关FH合闸,27.5 kV母线经过高压电阻R1和二极管D整流,瞬间直接给高压脉冲发生器PR充电达到一定幅值后负荷开关立即断开,在断路器DL跳闸1 s后故障线路上的高压脉冲开关K迅速合闸导通,高压脉冲发生器PR瞬间将高压脉冲电流释放到故障线路上,触发并重现接触网故障。接触网馈线出口处设置的高压行波传感器C将检测到发射出去的行波信号和由故障点反射回来的故障行波信号,此时判定装置将自动按照C型行波法分析处理,判定出接触网故障的性质和故障点距离。上述过程在2 s内完成。
在故障线路的断路器跳闸2~3 s后,馈线保护装置自动启动断路器重合闸送电,无论是瞬时故障还是永久性故障都可以对其进行快速查找、排除隐患、找出故障点。基于行波法的牵引网故障测距流程如图10所示。

图10 基于行波法的牵引网故障测距流程
4 提高行波检测精度措施
为了提高行波法故障测距的精度,可采用标定行波标准波速和小波分析抑制干扰2种手段。
4.1 标定行波标准波速
行波在线路上虽以接近于光速的速度传播,但速度的微小偏差对于实际测距精度会产生重大影响。对于户外运行的铁路牵引网来说,行波波速不仅与线路结构、分布参数、波阻抗、行波频率等牵引网特性直接相关,还需考虑线路的架设情况、天气状况等,影响因素复杂。本装置根据气候情况,采用分时、分段的方法从牵引供电接触网馈线上采集无故障时的标准行波信号,再根据实际线路的结构、波阻抗和距离等参数,实时标定不同气候、不同时段下各线路段的标准波速。在采集到发生故障接触网线路的行波信号后,根据当时的气候条件和各线路段的标准波速逐段分析计算,可准确标定接触网线路故障点,提高故障测距的精度。
4.2 小波分析抑制干扰
利用小波变换的时频局部化性可对故障电压、电流信号进行小波变换,根据其在不同尺度下的小波变换模极大值的表现规律,有效识别出由故障产生并向线路两端传播的高频暂态行波,进而可构成基于暂态电流进行小波变换求模极大值的行波距离保护和行波故障测距[2]。对行波进行小波变换,可准确地找出故障波形的突变点,提高基于故障源定位的精度。
5 结论
本文根据电气化铁路牵引网的结构与特点,建立基于行波法故障测距的仿真模型,针对有无站场2种工况进行仿真,根据仿真结果提出基于行波法的故障测距方案,并得出以下结论:
(1)行波法可对电气化铁路牵引网故障点进行有效定位,精确度比现行的阻抗法有极大提升。
(2)C型行波法相比于A、B型行波法,故障测距精度最高,以此为基础结合A、B型行波法,可对故障点进行综合定位。
[1] 李伟,王倩,刘超. 行波法应用于复线牵引网故障测距的仿真研究[J]. 铁道运输与经济,2008,30(6):89-92.
[2] 白汝山. 基于行波原理的接触网故障测距的分析[J]. 中国水运,2007,7(11):76-77.
[3] 李群湛,贺建闽. 牵引供电系统分析[M]. 成都:西南交通大学出版社,2007.
[4] 焦在滨,高仕斌. 行波法在电气化铁路牵引网故障测距中应用的可行性研究[J]. 继电器,2003,31(7):33-36.
[5] 冉旭,廖培金,陈平,等. 行波故障测距法在电气化铁路牵引网中的应用研究[J]. 电网技术,2001,25(2):35-38.
[6] 周源,卢毅,廖瑞金,等. 基于小波包提取算法和相关分析的电缆双端行波测距[J]. 电力系统保护与控制,2012,40(1):1-4.
[7] 鲍延义,汪志成,吴仲朗. 基于小波变换自适应匹配的高速铁路牵引网故障单端行波定位法[J]. 科学技术与工程,2012,12(25):6384-6389.
[8] 李一峰,陈平. 行波故障测距及其应用[J]. 现代电力,2008,25(1):44-48.
With regard to the problem that the accuracy of fault location of electrified railway traction network is not high, and on the basis of application of traveling wave method in electrified railway traction network in accordance with the characteristics of traction network, 3 types of traction network models based on the A, B, C traveling wave inspection devices are established to simulate two working conditions with yard/without yard, compare and analyze the accuracy of different types of traveling wave inspection devices; a scheme is provided for fault location of traction network, in which, the assessment is made mainly by C traveling wave method, assisted by A, B traveling wave methods.
Fault location; traveling wave; electrified railway traction network
U226.5+1
A
1007-936X(2018)03-0014-05
2017-07-20
刘 浅.中国铁路设计集团有限公司,助理工程师;黄海浪.中国铁路设计集团有限公司,高级工程师。
10.19587/j.cnki.1007-936x.2018.03.005
