X-38飞行器质量特性测量方法
2018-07-07陈永强周晓丽穆星科
陈永强 周晓丽 康 军 穆星科 谭 珏
X-38飞行器质量特性测量方法
陈永强 周晓丽 康 军 穆星科 谭 珏
(中国运载火箭技术研究院研究发展中心,北京 100076)
质量、质心和转动惯量是再入类飞行器的重要参数,其测量精度对飞行器控制至关重要。详细介绍并对比分析了X-38飞行器质量特性测量方法,测量结果表明:采用三点法c质量和三个方向质心位置,采用单点悬挂法和弹簧工作台可以准确测量三个方向的转动惯量。X-38飞行器的质量特性测量方法对于类似的再入飞行器质量特性测量具有很好的参考意义。
X-38;质量特性;测量方法

1 引言
X-38项目开始于1995年,目的是为国际空间站宇航员返回的飞行器(CRV)发展技术。X-38机长7.31m,机高2.22m,翼展3.81m,其外形借鉴了早期美国空军X-24A等升力体的设计,为标志性的钝头锥无主翼形体。X-38共制造了四架大气试验飞行器(201、131(131-R)、132、201),进行了20次(12次挂载,8次投放)飞行测试,其中投放试验由B-52运输机进行挂载。
飞行器的质量、质心和转动惯量是飞行器的重要参数,需要进行准确的测量。对X-38而言,试验飞行器不同技术状态以及飞行器外部安装的热防护系统对飞行器质量特性的测量提出了很高的挑战,X-38试验飞行器总计有30项主要的测量试验。本文通过对X-38飞行器质量特性测量方法进行阐述,以此为类似飞行器相关的质量特性测量提供参考。
2 X-38质量质心测量
X-38飞行器坐标系统定义见图1。X-38飞行器质量特性参数说明如下:X、Y、Z表示X-38飞行器质心、、轴位置;I、I、I表示X-38飞行器绕、、轴转动惯量。
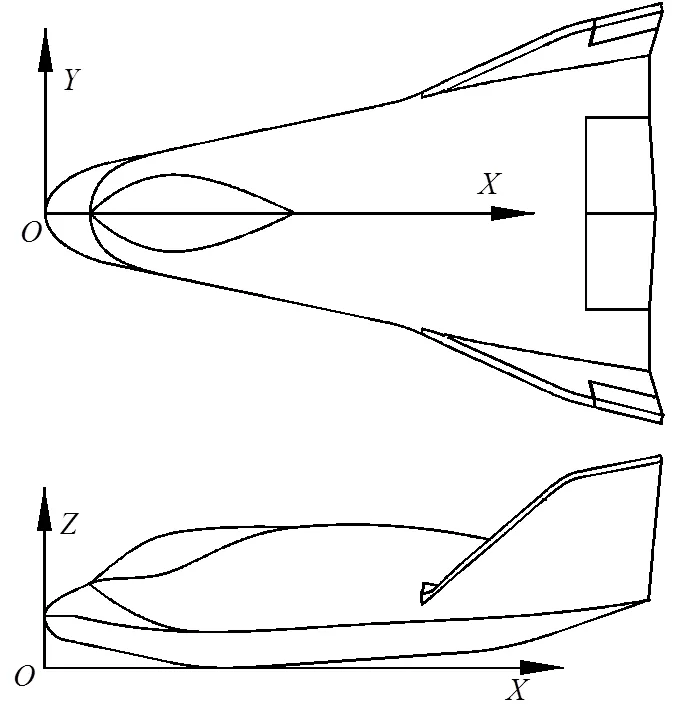
图1 坐标系定义
2.1 三测压元件测量方法
该方法通过在X-38飞行器上设置三个支撑点(一个在机头,两个在机身副翼前面),确定飞行器和支撑点之间压缩测压元件的位置(测压元件在支撑点上方)。三个测压元件载荷之和为飞行器重量,加上力矩以计算X和Y。图2为该试验的受力简图,该方法有两点需要注意:三个支撑点的位置须精确测量;确保未在测压元件上引入侧向载荷,飞行器必须水平,保持无俯仰、无滚转。

图2 重量和平衡受力简图



2.2 三点悬挂法
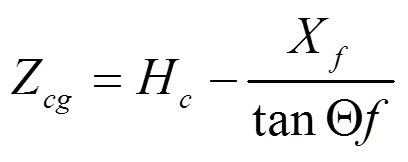
三点悬挂法可以测量飞行器的总质量和质心。飞行器悬挂处于水平方向,三个测压元件之和即为飞行器总质量,力矩之和可计算X和Y。测量机头不同的抬起与低头高度(见图3),可计算Z。总质量和X和Y的计算公式与式(1)、式(2)和式(3)相同,Z计算公式如下:

A、B和C定义见图3,其中:B=Xcg×cosα-Zcg×sinα,在X-38飞行器的测量中,α=15°。
2.3 采用配重的单点悬挂法
该方法主要是测量Z,将飞行器吊起,在水平状态,无倾角和滚转,配重块挂在飞机尾部。测量时每次增加一个已知重量的配重块,测量飞行器相应俯仰角的变化量(见图4)。通过配重重量变化导致俯仰角改变的测量结果可计算飞行器Z。测量时,飞行器俯仰角的变化通过机载惯性导航系统测得。

图4 带配重块的单点悬挂法几何图


2.4 多吊点的单点悬挂法
该方法主要是测量Z,通过采用带三个孔的吊装工装对飞行器进行测量。采用吊装工装测量时:吊装其中心孔时,飞行器处于水平状态;吊装点位于工装的前孔时,飞行器将机头朝上倾斜;相反,吊装点位于工装的后孔时,机头将朝下倾斜,见图5。

式中各符号定义见图5。

图5 多吊点的单点悬挂法的几何图
2.5 方法比较
X-38飞行器的测量试验结果表明,三点法(包括三点悬挂法和三测压元件测量法)的重量与平衡试验结果最好。采用配重的单点悬挂法测量时,飞行器在接近水平状态用单个测压元件吊起,确定其重量,在飞行器上添加已知重量,用以平衡其俯仰和滚转,一旦重量的位置测得,可计算出X和Y,但是由于误差源被带入到试验中,该方法不如传统三点系统法精确。此外,该方法的平衡重量精确位置很难测量,在单点悬挂时,飞行器处于俯仰和滚转的完全水平状态亦很难做到。X-38飞行器的试验结果表明,精确地测量Z被证明异常困难,俯仰角的精确测量可通过机载惯性导航系统获得,三点悬挂法是确定Z的最佳方法。
3 X-38转动惯量测量
3.1 双线摆测量Izz
在本方法中,飞行器被缆绳连接到两弹簧上,呈双线摆型(见图6),加载一耦合载荷于飞行器的机头和机尾。这样做的目的是在不引入滚转和俯仰的情况下,提供偏航力矩。
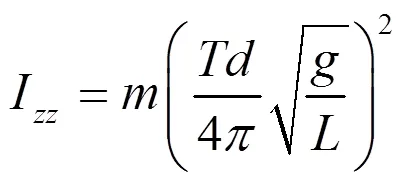
其中:m为飞行器质量;T为周期;g为重力加速度常数;d和L见图6。
3.2 单点悬挂法测量Izz和Ixz。
本测量试验布局图见图7。飞行器通过单点吊装工装吊起,飞行器底部装上刚性梁。弹簧连接到落地支架上和水平梁上,地面支架有不同垂直高度,使得可为试验提供不同弹簧角度。弹簧夹角角度改变通过前后支柱的不同高度的孔实现。
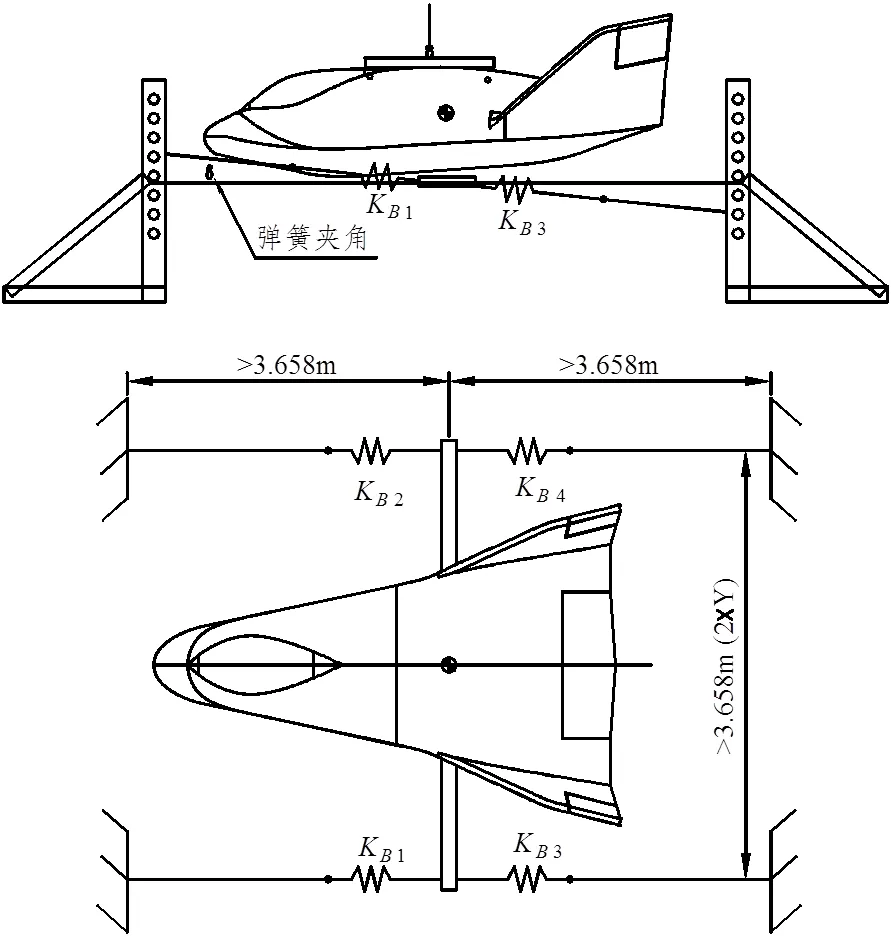
图7 测量Izz和Ixz的布局图
为获得I和I,飞行器必须在多个弹簧方向测量。弹簧使得飞行器绕偏航轴振动。如果I不为零,当弹簧作用面水平时,弹簧会导致飞行器在滚转和俯仰方向振动。弹簧作用在飞行器上的面在俯仰方向一直变化,直到没有滚转振动。在该角度下可计算得到I和I。


其中:为偏航振动频率;为2倍飞行器中心与弹簧支点距离;0为滚转速率与偏航速率比值为零时弹簧角;为四个弹簧常数。
3.3 弹簧工作台测量Ixx和Iyy
图8为测量I和I方法的示意图。该方法在工作台的质心区域采用刀口支撑,两端采用弹簧支撑。飞行器放在工作台上,质心在刀口的上方。飞行器由于弹簧的作用可以前后振动。惯性可由校准弹簧和振动时间求得。如果刀口在X的下方,飞行器俯仰振动,可确定I。如果刀口在Y下方,飞行器滚转振动,可确定I。飞行器和工作台布置允许振动50~100个周期。飞行器从工作台上移走,对工作台和弹簧重复上述实验。本方法中,测量工作台自身惯性要求去除飞行器对惯性的贡献。

图8 测量Ixx和Iyy试验布置图
控制振动频率的基本方程:

其中:1为总的左边/前边弹簧常数;2为总的右边/后边弹性常数;为弹簧力臂长度;W为支架重量;H为支架离刀口高度;W为飞行器重量;H为飞行器离刀口高度;I为关于刀口的惯量。
式(11)可以求I:

为获得飞行器关于自身质心的惯量,采用下式:

其中:I为支架刀口的惯量;m为飞行器质量。
当刀口位于X之下,I可取代I,因为俯仰惯量可以测得。反之,如果刀口位于Y之下,滚转惯量可以测得,I可取代I。
3.4 动态惯性法(DIM)
DIM法由辛辛那提大学提出,可确定所有质量特性张量。该方法采用动态力作用在物体上,测量其刚体加速度;3个6自由度(DOF)测压元件用来测量所有作用在飞行器上的力和力矩,包括支持力;一批线性加速度计用来测量飞行器的6 DOF加速度。在本方法中,必须知道飞行器的弯曲模态,这样可以在结果数据中将弯曲模态过滤出来。
飞行器可在三个支撑点采用气动隔振器隔开软性支持和飞行器支撑点,采用电磁振动器或冲击锤对飞行器施加力,根据牛顿第二定律(=),质量特性可由测量的作用力和加速度导出。该方法在X-38 132-R号飞行器进行了试验,并与传统质量特性试验方法得到的结果对比。结果表明,测量精度优于其他方法。本方法优点在于可不使用所有传统质量特性试验所需要的吊装和工装。
4 结束语
X-38飞行器对质量特性共进行了30项主要测试项目,有效地获取了高精度的质量特性参数,其测量方法具有一定的代表性和普适性。对于再入飞行器而言,质量、质心和转动惯量是非常重要的参数,但是由于存在加工制造、装配等误差,飞行器的质量、质心和转动惯量真实值与设计值存在差异,需要进行测量以修正设计参数。通过对X-38飞行器质量特性测量方法的分析,X-38所采用的质量特性测量方法对相关飞行器的质量特性测量具有很好的参考价值:
a. 采用三点法可以准确测量到被测量对象的质量和三个方向质心位置;
b. 采用单点悬挂法和弹簧工作台可以准确测量飞行器三个方向的转动惯量;
c. DIM方法与测量对象的模态有很大关系,且需要过滤模态数据,对于一些尺寸较大的测量对象,其测量方法并不成熟。
1 Rasky D J, Pittman R B, Newfield M E. The reusable launch vehicle challenge. AIAA-2006, 2006.9
2 Wilson E, Lages C, Mah R. On-line gyro-based, mass-property identification for thruster-controlled spacecraft using recursive least squares. The 2002 45th Midwest Symposium, 2002.8
3 Hagen J, Moore L, Estes J, et al. The X-38 V-201 flap actuator mechanism. Proceeding of the 37thAerospace Mechanisms Symposium, 2004.5
4 Peterson W L. Mass properties measurement in the X-38 project. SAWE Paper, 2004.5
5 Nagy C J. Weight, balance and inertia test plan/procedures, Revision 4, XCRV-024, 2000.8
6 Loe G, Munday S, Hart J. X-38 vehicle 131R free flights 1, 2 & 3: FCS & aerodynamics lessons learned. AAS 02-073, 2002.2
Measurement Method for Mass Properties of X-38 Vehicle
Chen Yongqiang Zhou Xiaoli Kang Jun Mu Xingke Tan Jue
(China Academy of Launch Vehicle Technology R&D Center, Beijing 100076)
The important parameters of aerospace vehicle include mass, centroid and moment of inertia, etc. The measurement precision of these parameters is vital for the vehicle control. This paper detailedly described the mass, centroid and moment of inertia measurement of X-38 vehicle, and analyzed these different measurement methods. The measurement results show that applying three-point method can accurately measure the mass and center of gravity, and single-point suspension and spring table can accurately measure three inertia of the vehicle. Finally, these methods that were applied for the X-38 vehicle have a very good significance to the mass properties measurement of other similar aerospace vehicles.
X-38;mass properties;measurement method
陈永强(1977),高级工程师,机械设计专业;研究方向:结构总体设计。
2018-03-04
