基于双足竞走机器人平台的设计性实验项目研究
2018-07-04滨州学院电气工程系张公永周宣征
滨州学院电气工程系 张公永 周宣征
0 引言
现代社会中,机器人可以完成高危险、重复的工作[1-2]。双足机器人应用范围广泛,对地面具有良好的适应性,在一些轮式机器无法前进的地形中,双足机器人却能如履平地,这使得双足机器人发展速度非常快[3-5]。国外早在20世纪60年代就开始了双足机器人的研究,最早是由美国通用公司的R.Smosher研制的一款名叫“Rig”的操纵型双足步行机器人。1969年日本早稻田大学加藤一郎教授研制出WAP-1(Waseda Auicmatic Pedipulator)平面自由度步行机,此机器人每条腿有髋、膝、踝三个关节,具有六个自由度[6-8]。进入21世纪,机器人的研究更是发展迅速,很多国家对机器人的控制、步态研究做出了巨大的突破[9]。国内相关方向研究较晚,但是发展迅速,如哈尔滨工业大学研制开发的“HIT”系列双足步行机器人可以静步态和动步态步行,并且能够完成前后行、侧行、转弯、上下台阶及上斜坡等动作[10-11]。双足机器人随着社会的发展也越来越被关注及应用。
省内外高校的机器人专业中机器人技术实验要么缺少实验设备,要么价格较为昂贵;电气工程及其自动化、自动化相关专业的单片机原理及应用实验、传感器技术及应用实验也多在实验台、实验箱上开展,学生的设计和实验必须依赖实验台或实验箱的硬件,且多为验证性实验,极大的束缚了学生创造性思维的开发和能力的提升。基于双足竞走机器人平台的设计性实验项目主要是完成机器人的行走动作,学生可以自主编程,发挥其创新性思维,循序渐进地完成双足机器人步态控制,增强学生学习的主动性、积极性,提高学生实践动手能力,使学生在实际操作中能够真正深刻理解并掌握所学知识。
1 双足竞走机器人平台设计
双足竞走机器人平台主要由机械部分和控制部分组成。设计围绕以上两部分展开,设计完成后,平台实物如图1所示。
1.1 机器人机械机构设计
(1)机械材料选择 市场上的舵机支架尺寸适合以上两种型号舵机,且是以冲压硬铝板折成,不易变形,重量轻,购买方便,价格低,适合大量使用,所以选用U型舵机支架连接舵机作为机器人双腿,机器人头部与脚部同样使用硬铝板材料制作。
(2)自由度选择 双足竞走机器人作为教学平台进行实验开发,需要做出模仿人类腿部简单活动、直立行走、翻跟头等动作。因此,在设计机器人整体结构时需要尽量与人类双腿结构类似。人体腿部主要有三大关节:髋关节、膝关节、踝关节[12],这三个关节使人可以完成行走、奔跑、下蹲等各种复杂动作。在设计机器人结构的同时,需要遵循结构越简单越好、可以完成动作越多越好的原则,所以在这三个关节各设立一个自由度,基于以上考虑,整体结构只需要六个自由度。

图1 双足竞走机器人平台实物
(3)舵机选择 舵机的结构紧凑、体积较小、易于安装,并且扭力大、角度控制方便,采用舵机控制既精确又方便,在机器人行业应用十分广泛,所以选用舵机为机器人提供驱动能力。在设计机器人动作时,机器人需要完成翻跟头的动作,因此髋关节与膝关节处舵机最大摆动角度会超出180°。HX6018D为180°舵机,HX6027D为270°舵机。这两种型号舵机供电电压范围大,自带保护,耐高压、耐烧,使用PWM信号控制,方便使用,适合教学与实验开发使用。选用HX6018D、HX6027D两种型号舵机适合项目需求。
(4)舵机位置选择 假设机器人左右方向为x轴,前后方向为y轴。髋关节、膝关节主要为机器人行走时前进提供驱动能力,因此此处舵机应该按照绕x轴旋转方向摆放,踝关节处舵机主要控制机器人重心左右移动以及抬脚落脚,所以此处舵机按照绕y轴旋转方向摆放。
(5)尺寸与整体结构设计 为方便使用,且考虑舵机力量可以满足需求,机器人整体不能太大。机器人的脚部与地面接触面积直接影响机器人在行走过程的稳定性,脚部尺寸为13.5cm*3.5cm,既增强稳定性又不因体积过大增加重量,减轻了舵机负荷;机器人头部是连接两条腿的桥梁,头部变形会直接影响机器人的稳定,材料选用4mm硬铝板,不易变形,重量轻,尺寸设计为20cm*5cm,在头部两端用铜柱架起肩部结构,尺寸为12cm*2cm,翻跟头过程中使支撑点外移,增强稳定性;两条腿间距不宜过大,防止脚步支撑力量不足引起无法将腿抬起,机器人双腿是对称结构,将左右腿的舵机使用支架对称安装,然后将双腿安装在架起双肩的头部上,最后将脚部安装在踝关节舵机上;在机器人头部安装控制系统,可以方便调试程序与检查线路,将电池放置于头部下方两腿之间,与放置在双肩位置相比降低了重心,增强稳定性,至此机器人整体结构设计制作完成。
1.2 机器人控制系统设计
机器人控制系统主要功能是驱动舵机完成相关动作。系统功能框图如图2所示。
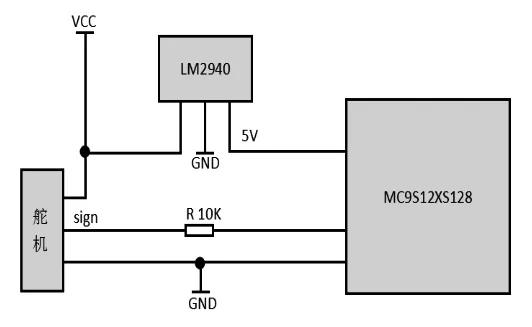
图2 机器人控制系统框图
(1)主控芯片选择 平台主控芯片选用16位的MC9S12XS128,它包括2个异步串行通信接口、一个8通道输入捕捉/输出比较定时器模块、1个串行外设接口、16通道12位A/D转换器和一个8通道脉冲宽度调制模块,方便控制舵机[13]。
(2)舵机控制 市场常见舵机是由一个脉冲宽度调制信号(PWM)控制的。脉宽调制信号周期是20ms,有效信号在0.5-2.5ms之间[14]。在舵机的内部会产生一个高电平为1.5ms的标准脉冲,这个脉冲与由控制系统输入舵机的脉宽调制脉冲相比较,产生一个差值,如果差值不为零则舵机转动,舵机的电位器同样跟着转动,电位器的转动改变这个差值直到为零则舵机停止转动。舵机正反转动则是由差值的正反控制的,差值为正则正向转动,若为负,则反向转动。舵机转动的角度与控制信号是线性变化,脉冲信号越宽,转动角度越大。每一个宽度的控制信号对应着一个角度,如脉冲信号为0.5ms时舵机转动到0°位置停止不动,脉冲信号为2.5ms时为则舵机转动到180°或者270°。
(3)电源电路设计 MC9S12XS128芯片采用5V供电,LM2940芯片可以输出5V固定电压,内部含有电流限制、电源反接保护、过热保护电路,电路简单,电压稳定,适合给主控芯片供电。输入端电容47μf,输出端电容22μf。舵机是系统耗电最大的器件,最高可使用11V电压供电,且电压越高舵机扭矩越大。电池为11V锂电池,可以直接给舵机供电。舵机工作时电流大于750毫安,远大于主控芯片工作电流,芯片PWM信号输出引脚与舵机控制端直接连接会形成反馈电流烧毁主控芯片,解决方法是在舵机与主控芯片信号输出引脚间串联一个10kΩ的电阻保护芯片,原理图见图2。
2 基于平台的设计性实验开发
2.1 设计性实验开发流程
借助双足竞走机器人平台,机器人动作遵循由易到难,从简单到复杂的思路设计,可以开发多个设计性实验项目,实验利用CodeWarrior IDE进行程序编写,搭配USBDM仿真器,完成程序的在线调试与下载,最后给出不同控制信号时机器人动作的效果图及实验分析。
2.2 设计性实验项目
(1)单个舵机的角度控制实验
实验目的:通过软件编程并下载到控制系统中,实现控制舵机转动角度目的。
实验步骤:首先用CodeWarrior IDE建立一个工程文件,设置选项,对单片机脉冲宽度调制模块、时钟设置等进行初始化,设置一个引脚输出PWM信号,编写程序(见图3),控制PWM信号变化来实现舵机的转动;在调试过程中,使用USBDM的在线调试功能(见图4),可以大大减少程序下载次数,使调试过程更加方便。通过USBDM将程序下载到单片机中,观察舵机转动与PWM信号变化的关系。

图4 USBDM的在线调试界面
实验效果:通过改变PWM的占空比信号,可直观看到单个舵机的角度变化。实验效果见图5。

图5 占空比信号1500时1号舵机角度变化图
实验分析:学习控制舵机转动角度,了解机器人基本关节的运动情况,可以加深对机器人平台的了解,并且在此过程中能够使用C语言程序设计与单片机原理及应用课程中的知识,巩固课堂所学。
(2)机器人单腿摆动控制实验
实验目的:通过软件编程并下载到控制系统中,实现机器人单腿摆动。
实验步骤:利用实验一中建立的工程文件,对程序中各部分初始化进行修改,使单片机通过三个引脚同时输出三个不同的PWM信号,用这三个信号控制机器人一条腿上的三个舵机,实现三个舵机同时转动的目的。通过修改子程序中PWM信号的宽度,可以改变腿运动的情况。图6可以看到,三个舵机PWM占空比信号分别为1240、1320、1720时的实验效果。
实验分析:同时控制三个舵机,可以使学生更加深刻的学习到PWM脉宽调制模块的工作原理,并为控制整个机器人平台作基础,使实验有层次性的进行更有利于学生的理解与掌握。
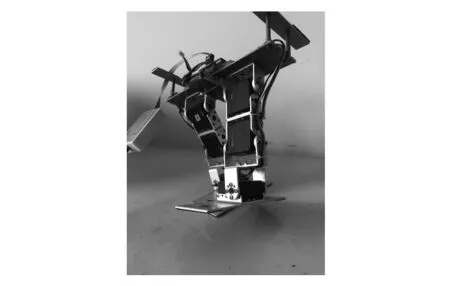
图6 机器人单腿摆动效果图
(3)机器人步伐控制设计实验
实验目的:编写程序控制机器人完成模仿人类步伐的动作,使机器人可以前行。
实验步骤:建立一个新工程,对各模块进行初始化设置,输出六个信号控制机器人双腿做出前行动作并前进一段路。由图7可以看到本次实验效果。

图7 机器人步伐控制实验效果图
实验分析:精确控制舵机需要对脉冲宽度调制模块进行级联设置,但是设置后输出四个不同PWM信号,精确控制六个舵机可以同时使用定时器模块,使用定时器输出模拟PWM信号控制舵机,完全可以实现控制机器人六个舵机的目的,同时使学生加深对定时器模块的理解。
(4)机器人翻跟头动作控制实验
实验目的:控制机器人模仿人类翻跟头动作。
实验步骤:在实验三中建立的工程中修改舵机控制程序,使机器人完成翻跟头的动作。图8为机器人翻跟头动作控制实验效果图。

图8 机器人翻跟头实验效果图
实验分析:首先分析机器人结构,是由三个关节组成,完成翻跟头,则需要髋关节与膝关节转动,踝关节则不需改变。第一步是髋关节的两个舵机同时转动90°,然后是膝关节转动,此时机器人完成前卧的一个状态;第二步使髋关节先转膝关节后转,此时机器人处在倒立状态;第三步膝关节先转动90°,髋关节随后转动,此时脚掌头部同时落地;最后一步膝关节转动使头部离地,髋关节转动将头部直立起来,四个步骤完成翻跟头动作。此实验可以让学生深刻理解双足竞走机器人的控制策略,对机器人技术有更深入的了解。
2.3 实验项目拓展
独立完成上述实验之后,学生可以自己设计更高难度的动作并实际操作加以实现。例如如果需要双足竞走机器人走直线,则可借助超声波传感器、红外测距传感器、灰度传感器等检测周围环境辅助机器人达到上述要求[15],学生对传感器的使用可以学习单片机中模数转换、串行口模块,全面开拓自身创造性思维。
3 效果评价
通过设计性实验项目的开设,增强了学生对实验课的兴趣,较为深刻理解了机器人的控制策略,提高自己的编程能力,部分同学以此为基础参加中国机器人大赛和山东省机器人大赛,收获了较为可喜的成绩。表1和表2为获奖情况统计。

表1 中国机器人中国机器人大赛暨RoboCup公开赛获奖情况统计(2013-2016)

表2 山东省机器人大赛获奖情况统计(2013-2016)
4 结语
借助双足竞走机器人平台的设计性实验项目,可较为有效地解决相关课程实验设备昂贵、验证演示实验较多、学生自主创新能力差的问题,为应用型人才的培养提供出新的思路。
[1]谭冠政,朱剑英,尉忠信.国内外两足步行机器人研究的历史、现状及发展趋势[J].机器人,1992(3):59-64.
[2]谢涛,徐建峰,张永学.仿人机器人的研究历史、现状及展望[J].机器人,2002,04:367-374.
[3]戚开诚.仿人形机器人机构设计[D].河北工业大学,2004.
[4]张博.小型双足人形机器人机构设计与步态规划[D].哈尔滨工业大学,2006.
[5]徐谋锋.人形机器人机构与控制系统设计及步态规划研究[D].山东理工大学.2010.
[6]周浩.多自由度双足机器人步态控制策略研究[D].新疆大学,2015.
[7]赵理想,宁祎.仿生双足机器人步态规划研究现状及展望[J].机电信息,2016,27:122-124.
[8]沈惠平,马小蒙,孟庆梅.仿生机器人研究进展及仿生机构研究[J].常州大学学报(自然科学版),2015,01:1-10.
[9]王国彪,陈殿生,陈科位.仿生机器人研究现状与发展趋势[J].机械工程学报,2015,13:27-44.
[10]王海燕,李贻斌,宁龙霄.液压驱动双足机器人运动系统的设计及实现[J].吉林大学学报(工学版),2014,03:750-756.
[11]杨萍,樊迪.小型双足机器人步态规划研究[J].机械制造,2015,09:39-42.
[12]梶田秀司,管贻生.仿人机器人[M].清华大学出版社,2007.
[13]翟文鹏,李志伟.基于飞思卡尔单片机的双足机器人的设计[J].硅谷,2015,04:28-29.
[14]王功,孙亚军,黄爱芹.双足竞走机器人设计[J].机器人技术与应用,2013,06:39-41.
[15]于佳.仿人机器人的关节运动控制系统与传感器系统设计[D].上海:上海交通大学,2010.
