基于激光位移检测的异位孔系快速测量系统
2018-07-04张晨赵转萍
张晨,赵转萍
(南京航空航天大学 机电学院,江苏 南京 210016)
0 引言
凡有孔的机械零部件,这些孔主要是用于安装或者构建密封空间等作用,而这些零部件上的孔中心线之间多数是异面的位置关系,这里定义为空间异位孔。孔的制造精度直接影响着一个系统的装配精度或传动质量,进而影响系统的质量与使用寿命。因此有必要对零部件上的孔特征进行精确测量,以提高零部件的质量,延长系统的使用寿命。目前,对于孔类零部件的位置度的测量方法并不成熟,一般都是通过三坐标测量机等接触式的测量方式实现对孔类零件的测量[1]。对于大批量零件孔特征的快速检测来说,接触测量方式直接影响着生产效率。而基于数字图像处理的孔圆柱度的快速测量方法容易受到光照强度的影响,不适宜于一般的工业生产[2]。为此设计出一套可用于工业生产的快速、准确且稳定的空间孔测量系统是十分必要的。
1 测量系统工作原理
以汽车上的方向盘连接件为例,如图1。基于激光位移检测原理,设计一套用于工业生产线的空间孔系位置度的快速测量系统。方案采用5个激光三角原理的位移传感器组合成一个综合测头,通过多个激光位移测量的数据拟合出被测量孔的曲面轮廓,进而得到孔的尺寸和位置信息。测量的关键理论包括:综合测头的准直理论、多测头坐标系标定理论以及基于相对位移数据的圆柱拟合技术等。测量的第一步就是要实现综合测头的准直,即是调整综合测头的中心线使其与标准工件孔中心线的完全重合过程。
图1 方向盘连接件示意图
1.1 综合测头的准直
如图2所示,是测量的准直前的基本状态,这里只画出安装3个传感器时的准直状态,图2左侧为综合测头自身的坐标系。任意相邻的光平面之间的夹角约为72°,不同的测量角度不会对激光测量的结果造成影响[3]。图2中左侧的3条A线段代表平移前的3个激光位移传感器,右侧的3条线段代表移动后的激光位移传感器。孔上的1-3线段是3个光平面与孔的圆柱曲面的交线。
为了求解的方便,先给出相关定义和说明。靠近中心侧的安装孔呈中心对称分布,每个传感器是通过2个安装孔来定位。定义这5个中心端安装孔形成的环形截面为基平面,定义测头中心线与基平面的交点为坐标原点,并且依次为各个传感器编号。取1#传感器的法向为z轴,取其中一向为正方向,设综合测头中心线为x轴,设其指向被测孔的一侧为其正方向,这样就建立了测头坐标系。图2中给出了1#、2#、5#传感器沿测头中心线移动前后分别形成的光平面。
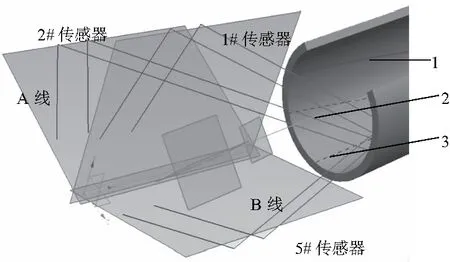
图2 测量坐标系建立示意图
假设1#、2#、5#传感器和基平面之间的夹角分别为α1i,靠近测头中心线侧的各个传感器安装孔形成的圆的直径为D0,各个传感器与xoy平面的夹角分别为βi,设定传感器的激光光源到中心侧安装孔中心的距离均为L,平移前传感器数据分别为D1i。平移的距离为△D,平移之后的传感器测得数据分别为D2i。由图2中可以得知,各个传感器在基平面内安装孔的坐标为(0,D0cosβ/2,D0sinβ/2),激光光源的点坐标为(Lsinα, (D0/2+Lcosα)cosβ, (D0/2+Lcosα)sinβ),可以得到移动前传感器所在直线的方程为:
激光束所在的直线既垂直于其光平面的法向量,也垂直于传感器所在直线。如果传感器此时测得的距离为D1,那么就能解算出此时激光束与圆柱曲面的交点坐标:
平移后综合测头只是x方向上的变化,相当于整个坐标系的平移。于是可以得到移动之后各个交点的坐标:
为此相当于测定了圆柱曲面上10点的坐标。
1.2 基于遗传算法的曲面轮廓拟合
空间圆柱面的拟合方法有遗传算法距离函数参数化算法、Gause-Newton优化算法、特征值算法等,下面从改进遗传算法的角度拟合出当前圆柱曲面的方程[4](图3)。
空间内任意一条直线可用一点和一个方向向量来表示,如果设直线上的一点的坐标为M0(x0,y0,z0),直线的方向向量为(m,n,p),若设参数变量为t,则可以得到直线的参数方程:
(1)
于是可以得到圆柱曲面的一般方程:
(2)
式中,(x,y,z)为柱面上的坐标,R为圆柱的半径。式(2)可以改写为:
(3)
于是只要求得x0、y0、z0、m、n、p、R就可以求得孔的曲面方程。为了保证测量结果的唯一性,需对上述的参数限定取值区间,得到孔的曲面方程的拟合参数辨识的目标函数为:
(4)
式中,n为采样点个数,(xi,yi,zi)为采样点坐标,x0、y0、z0满足f(x0,y0,z0)=0,并且m、n、p满足f(m,n,p) =0。这样就拟合出了孔的曲面方程,根据曲面参数调整测头坐标系x轴使其和孔中心线完全重合,即可实现综合测头的准直过程。
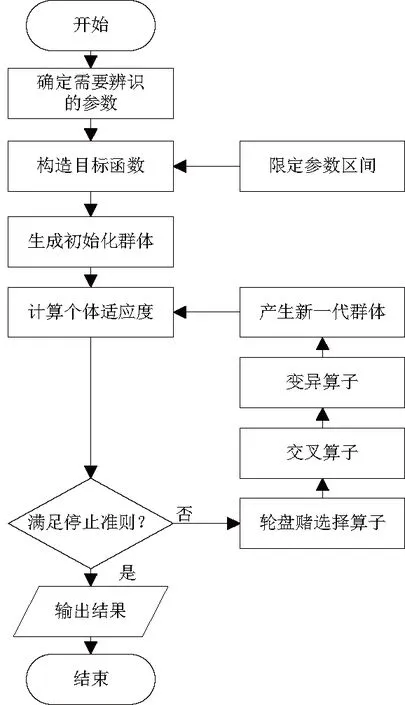
图3 基于遗传算法的孔的曲面方程拟合流程图
1.3 多测头坐标系标定
标准工件是装夹到标定工作台上的,标准工件上的所有孔的位置要素均已知,当标准工件在其某个基准方向上移动一定距离时,各综合测头可测量出孔曲面轮廓。

图4 测量坐标系的坐标变换示意图
在分别对各个综合测头准直之后,将标准工件在工作台上分别沿着X轴、Y轴移动一定的距离,计算得到被测孔在当前测头坐标系中位置。如图4所示,A线为准直之后孔中心线,B线为移动工件后孔中心线,设测量坐标系为XYZ坐标系,测头坐标系为xyz坐标系,显然A、B线间的距离即是孔的中心线实际移动的距离,XOY平面的线段为中心线在XOY平面内的移动的距离。以孔中心线上的任意一点为例,设当前某点坐标为(X,Y,Z),中心线与测量坐标系中的3个坐标轴的正向的夹角分别为A、B、C,标定工作台在x、y方向上移动的距离分别是△X、△Y,那么移动后该点的点坐标应该是(X+△X,Y+△Y,Z+△Z),得到孔中心线实际移动的距离为:
设当前拟合出的孔曲面在当前测头坐标系中的方程为:
则必然有:
式中,δ、φ分别为移动工作台之后的孔中心线与测头坐标系的y、z轴正向的夹角。由此可得测头坐标系的x轴相对于测量坐标系的各个坐标轴的正向的夹角分别为A、B、π-C;测头坐标系y轴相对测量坐标系各坐标轴正向夹角分别为A+δ、B-δ、π/2+C。由右手定则可得测头坐标系的z轴的方向及其相对于测量坐标系的角度。
旋转参数可由测头坐标系的坐标轴与工件坐标系的夹角计算得到θx、θy和θz,则对应的旋转变换矩阵为:
由标准工件的参数即可得到综合坐标变换矩阵,测头坐标系到测量坐标系的坐标变换即是测量系统的标定过程,系统采用的是比较测量方式,相同的物理量未知的情况下不会对测量结果有影响。当进行测量状态时,将被测零件装夹到标定工作台上,综合测头采集到孔的曲面轮廓上的各点数据,以拟合出孔曲面轮廓,得到的曲面轮廓经坐标变换到测量坐标系即可分析孔的曲面特征,进而实现对孔的完整测量过程。图5给出了异位孔系快速测量系统的测量流程。

图5 系统运行流程
2 测量系统机械结构设计
根据系统的要求设计出合理的空间精密运动平台来满足综合测头的中心线的自动调整以及满足被测量件的装夹与位置调整的要求。检测系统使用的激光位移传感器的参数如表1所示,该检测系统可以检测的孔径范围在15~80mm范围内。

表1 激光位移传感器的性能参数
2.1 综合测头调整装置
为了实现综合测头的自动调整,需要设计一个综合测头的自动调整装置,综合测头需要实现五自由度调节,分别是两个水平方向上平移、俯仰偏摆动作以及综合测头的伸缩运动。水平方向上的移动采用的是FFZD型滚珠丝杠副的运动机构,为了适应不同大小的孔径,移动行程<20 mm,综合测头运动平台的运动精度直接影响准直效果。俯仰偏摆结构均采用涡轮蜗杆的传动方式,有效的运动行程为±15°,驱动电机选用两相混合式35系列步进电机。伸缩结构使用的是滚珠丝杠副传动机构,整体设计轻便、安装方便(图6)。
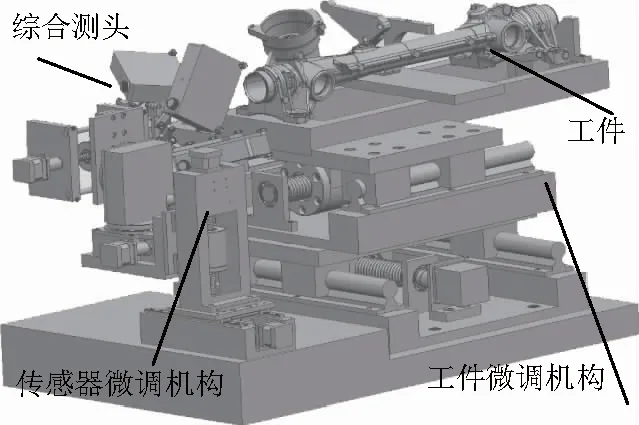
图6 测量系统机械结构总成
2.2 被测量件调整机构
为了保证系统的测量精度,需要对被测量件进行有效的装夹与调整,工件安装到两自由度的运动平台上,为保证零件的精确测量,零件在两个方向上的运动范围不应<80 mm,调整平台选用的是FFB4006-2型内循环浮动式滚珠丝杠副的运动结构,驱动电机使用的是三相混合式60BYG350CLS型步进电机。
3 测量系统测控模块设计
嵌入式Linux因其较好的可裁剪性、强实时性、强稳定性、性价比高等优势正逐渐的应用于工业环境,本检测系统是基于嵌入式Linux开发出来的。系统的测控模块主要由数据采集卡与数据处理模块组成。运行于ARM处理器上的应用软件通过USB接口实现与数据采集卡通信[5],并可通过数据采集卡来实时地监控运动平台的实时运动状态[6]。检测系统的控制结构如图7所示。
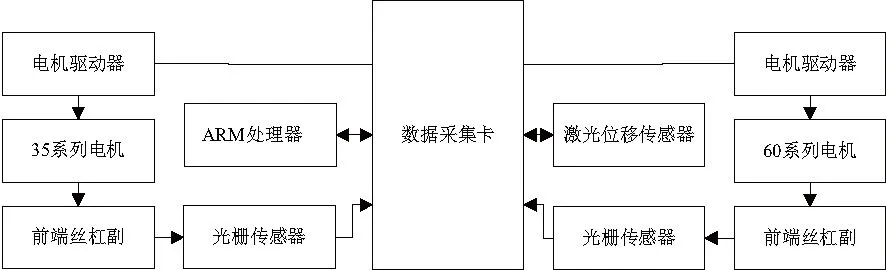
图7 控制系统结构框图
4 测量系统算法
遗传算法是一种借鉴生物的进化过程中的自然选择和遗传机制的一种优化算法。检测系统中在拟合孔的曲面方程中采用的是遗传算法,遗传算法主要包括三种遗传算子,分别是选择算子、交叉算子以及变异算子[7]。在进行遗传算子操作之前首先需要对群体进行编码。该检测系统采用十进制编码的方式,生成初始化群体的群体规模为50,变异概率取值范围在0.01~0.1,交叉概率取值范围为0.4~0.8,通过分析发现在经过50代之后基本能满足系统要求,这里统一取N=50。在经过几秒的计算过程之后就可以得到孔的曲面方程[8]。经过遗传算法拟合得到的曲面方程是测头坐标系中的方程,因此通过坐标变换将测头坐标系中的曲面方程变换到测量坐标系中。
5 测量系统的不确定度与实验分析
检测系统的不确定度的来源主要有:激光位移传感器不确定度、五自由度运动平台的运动误差引入的不确定度、高精度的装夹定位装置引入的不确定度以及高精度的激光位移传感器的安装引入的不确定度。不确定分量彼此相互独立,因此合成了标准不确定度值。经过以上推论可以得到系统的不确定基本符合要求值[9]。
该检测系统可以使用三坐标测量机以及某一方向盘连接件作为标准件,通过三坐标测量机对方向盘连接件的空间异位孔曲面的拟合结果与本系统拟合结果的比对分析可以判断本文中曲面拟合的方法是可行有效的,并且具有较好的拟合效果。通过最终的测量结果的分析和比较,可以认为该检测系统的测量精度基本满足要求。
6 结语
研究提出了一种基于激光位移检测的空间孔的快速测量系统,系统地介绍了检测系统的测量原理、检测系统的硬件结构设计以及控制模块设计等模块。因其快速、非接触的无损检测的测量方法,可以保证对大批量的某种型号零件的快速测量。通过对系统不确定性的分析,该检测系统的不确定度符合系统要求,在后续工作中可以使用更高精度的非接触探头式传感器对曲面轮廓扫描来提高曲面拟合精度以提高测量精度。该检测系统采用曲面拟合的方式弥补了不能快速检测大批量空间异位孔类零件的缺点,具有十分重要的现实意义。
[1] 王鹏. 发动机缸体结合面孔位置度测量方法的研究[J]. 仪器仪表学报, 2013, 34(1):51-56.
[2] 闫航瑞. 表面倾斜对激光三角测量的影响及校正研究[J]. 光学仪器, 2014,36(1):11-14,19.
[3] 陈浩. 光学式内径精密测量原理与技术研究[D]. 天津:天津大学, 2010.
[4] 秦世伟. 基于遗传算法的三维空间柱面拟合[J]. 同济大学学报, 2010,38(12):1861-1868.
[5] Hou X, Wang X, Tong L. Design of the high-speed, high-precision and large-scale data acquisition system: 7th International Conference on Signal Processing, Beijing, peoples r china[C]. publishing house electronics industry, po box 173 wanshou road, beijing 100036, peoples r china, aug 31-sep 04, 2004.
[6] 刘伟. 基于嵌入式Linux和Qt/E的数据采集系统的开发与应用[D]. 北京:中国矿业大学, 2014.
[7] 王丽华, 谷川, 万军. 基于改进遗传算法的雷达天线曲面拟合参数辨识[J]. 机电一体化, 2008(4):54-57.
[8] Wang W, Pottmann H, Liu Y. Fitting B-spline curves to point clouds by curvature-based squared distance minimization[J]. acm transactions on graphics, 2006,25(2):214-238.
[9] 梁爽. 专用密封圈及模具检测系统设计[J]. 机电工程, 2016,33(2):287-293.
