基于视觉的牙刷表面注胶质量检测方法研究
2018-07-04沈玮李凯王斌王化明
沈玮,李凯,王斌,王化明
(1. 南京航空航天大学 机电学院,江苏 南京 210016; 2. 江苏艾萨克科技有限公司,江苏 扬州 225000)
0 引言
传统的牙刷表面注胶质量检测大多使用人工目测的方法,存在效率低下、误检率高、检测标准不一致等缺点,已经不能满足当前高效率、高质量的牙刷生产需求。视觉检测技术通过视觉代替人工对牙刷表面注胶质量进行分析和判断,与人工检测相比,具有:1) 检测效率高。检测速度快;2) 检测准确率高。长时间的人工检测会导致视觉疲劳从而造成误判,但是视觉检测具有无法比拟的一致性以及重复性,可以保持长时间的稳定工作;3) 检测实时性好。可以集成于生产线中,满足实时、大批量在线检测需求[1-2]。因此可大幅提高企业的生产效率以及降低生产成本。
牙刷的注胶缺陷主要有多胶和缺胶两种:多胶如图1(左)所示,是指牙刷表面注胶区域大于标准表面注胶区域;缺胶如图2(右)所示,是指牙刷表面注胶区域少于标准表面注胶区域。本文目的是通过视觉检测技术准确判断出牙刷表面注胶是否存在以上两种缺陷,实现注胶质量检测。主要工作包括:1) 注胶检测视觉系统的设计,包括光源和照明方式的设计以及工业相机和镜头的选型。2) 注胶检测算法的研究,主要包括图像预处理、图像分割以及缺陷判定等。

图1 多胶缺陷(左)和缺胶缺陷(右)
1 系统设计
1.1 系统总体方案
注胶视觉检测系统如图2所示。该系统主要由工控机、CMOS相机以及照明光源组成。在工控机上编写人机界面,通过软件触发工业相机采集图像,完成图像处理,最后将处理结果显示在人机界面上。
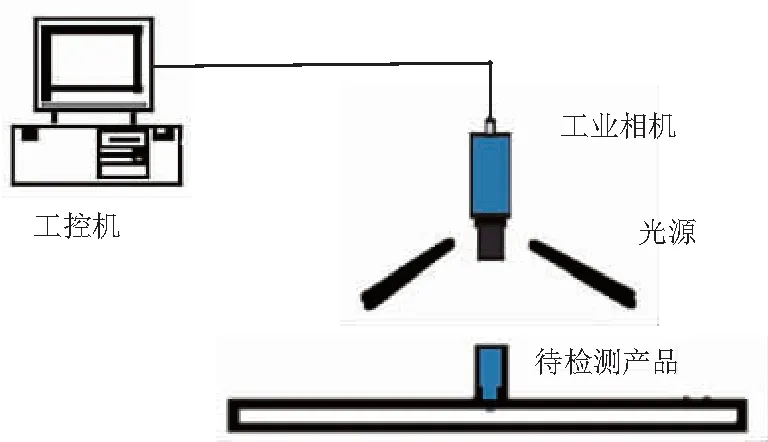
图2 系统设计图
1.2 光源和照明方式设计
照明系统是视觉系统的关键部分之一,直接决定着图像质量以及检测算法的复杂程度。牙刷表面注胶图像应该满足:1) 对比度高,目标与背景边界清晰;2) 注胶表面的颜色信息需要还原真实性,不能过度曝光等。考虑到牙刷长条形的形状,综合实用性及经济性的考虑,采用条形光源直射光作为光源及照明方式。同时被检测的牙刷注胶部分长约为8 cm,选用LED条形光源,光源参数如表1所示。
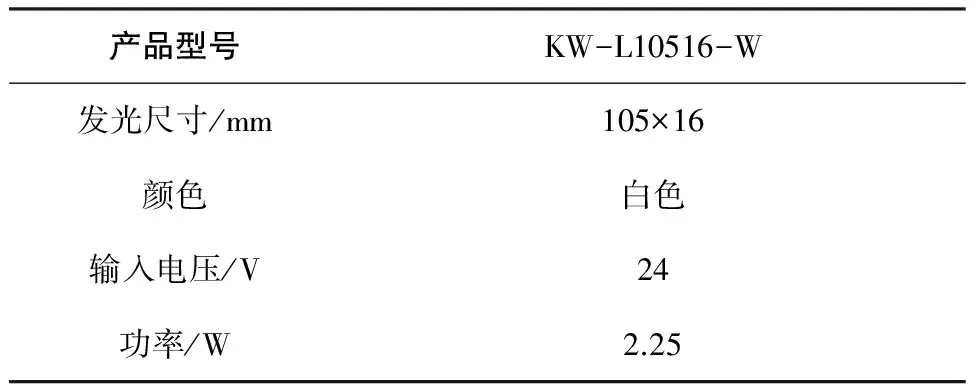
表1 光源参数
1.3 工业相机及镜头选型
工业相机主要有CCD相机和CMOS相机,两者主要区别在于图像传感器原理不同。CCD相机采用CCD芯片,一般价格较高,具有无灼伤、无滞后及低功耗等优点。CMOS相机采用CMOS芯片,具有良好的集成性、低功耗及输出图像无拖影等优点[3]。综合考虑成本、分辨率及信噪比等因素,选择MER-310-12UC-L型号的CMOS相机,相机参数如表2所示。镜头的主要指标是镜头光学后主点到焦点的距离。所选镜头是Computar公司的M1214-MP2镜头,焦距为12 mm。图3为系统采集的牙刷图像,可见牙刷与背景边界清晰,表面蓝色(图3中部灰色)注胶部分颜色保留完好,达到预期效果。

表2 相机参数

图3 牙刷表面注胶图像
2 牙刷表面注胶检测算法研究
2.1 算法流程
牙刷表面注胶质量检测算法的流程框图如图4所示。
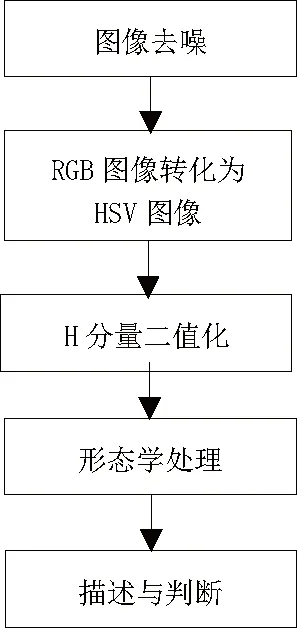
图4 算法流程框图
算法是基于HSV彩色空间对牙刷表面注胶进行图像分割操作,对得到的感兴趣区域进行区域特征表示与描述,最后根据与标准值的比较判定牙刷注胶是否合格。
2.2 图像去噪
图像在采集与传输的过程中,由于镜头、光电转换器件以及外界光照等因素的影响,不可避免会在图像中产生随机噪声。针对图像噪声,一般采用滤波的方法加以消除,图像滤波分为空间域滤波以及频域滤波,文中采用空间域中值滤波的方法来去除图像噪声。
中值滤波是一种基于空间域操作的非线性空间滤波,用空间域中灰度的中值代替图像当前的像素点,具有不明显模糊边界的优点[4]。对彩色图像进行中值滤波的方法是将RGB空间的彩色图像分解成R、G、B 3幅单色图像,然后用大小为9×9的方形滤波器对各单色图像进行中值滤波,再将3幅处理完的图像合成生成新的图像。中值滤波前后的注胶图像如图5所示,其表面注胶边缘以及颜色信息清晰可见。

图5 中值滤波前后图像
2.3 彩色空间转换
在实际应用中,存在着多种不同的彩色空间,有RGB、HSV、HIS以及CMY等多种彩色模型。最常见的是RGB彩色空间模型,在该模型中每个彩色像素点分别对应着红、绿、蓝3个分量,但是RGB彩色空间中的3个分量值会随着外界光场强度的变化而改变。HSV颜色空间是由色调H、饱和度S以及亮度V 3个分量组成,它将亮度信息从彩色中分解出来,色调和饱和度与人类的感知相对应,在图像处理算法中有着广泛的应用[5]。
因为牙刷生产现场环境复杂,不可避免会受到外界光照的影响,所以在RGB彩色空间分割表面注胶区域易受到外界干扰,因此,在HSV颜色空间对牙刷表面注胶进行图像分割。RGB彩色空间到HSV彩色空间的转化公式是[6]:设给定RGB彩色空间图像中的每个像素点向量值为(R,G,B),各个分量取值范围为[0, 1];转化到HSV彩色空间中图像的每个像素点向量值为(H,S,V),各个分量取值范围为[0, 1]。设Tmax为(R,G,B)向量中的最大值,Tmin为(R,G,B)向量中的最小值,则:
V=Tmax
(1)
S=(Tmax-Tmin)/Tmax
(2)
(3)
若根据式(3)求得的H<0,则:
H=H+360
(4)
HSV彩色空间中的色调H、饱和度S分量比较重要,文中采用色调H分量做处理。图6所示为牙刷表面注胶图像转化到HSV空间中的H分量图像。
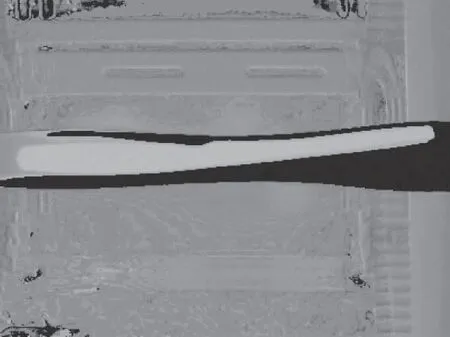
图6 色调H分量图像
2.4 二值化及形态学处理
分析图6,注胶部分图像的H分量值主要集中在145~155之间,因此采用多阈值处理,将135~165像素值范围之间的像素点分割为一个物体,其余的像素点则当作背景。分割后的图像如图7所示,从图像中可以看出,虽然注胶部分已成功分割,但图像中仍有一些无关的细线及白点噪声。这些噪声的存在会对后续的区域特征表示产生干扰。既要消除这些噪声又不能对被分割的注胶区域产生影响,因此采用形态学处理中的开操作来对二值化后的图像进行处理。形态学开操作将图像先腐蚀后膨胀,具有平滑物体轮廓以及去除细小突出物的效果。文中采用7×7的方形结构元对图像进行开操作运算,处理完的图像如图8所示。

图7 二值化后图像
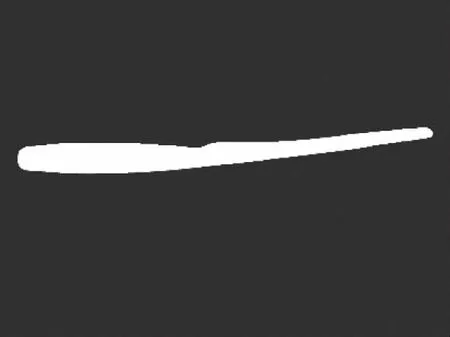
图8 开操作后的图像
2.5 描述与判断
将图像分割成一个或多个区域后,分割后的像素集需要提取相应特征进行描述。根据注胶的特点,采用区域的面积、周长及宽度等特征描绘区域。区域的面积定义为该区域中像素的数量,周长是其边界的长度,宽度是其最小外接矩形水平方向的边长长度。选取了具有典型特征的10支牙刷样本,采用上述图像处理步骤得到注胶区域后计算其面积、周长及宽度等特征(像素)参数,结果如表3所示。
从表中可以看出,不合格牙刷表面注胶均与合格产品有较大的偏离,因此提出一种简便易行的判断方法。首先是获得合格牙刷表面注胶面积A、周长的值P以及宽度W,并将其作为标准值,再设置合理阈值T1、T2和T3。当待检测牙刷表面注胶面积A1、周长P1及宽W1满足公式(5)条件时,将该牙刷判断为合格,合理阈值的设置需要更多
实验样本数据作为参考。由表3可见,采用该方法能够判别牙刷注胶的缺胶和多胶等缺陷。
(5)
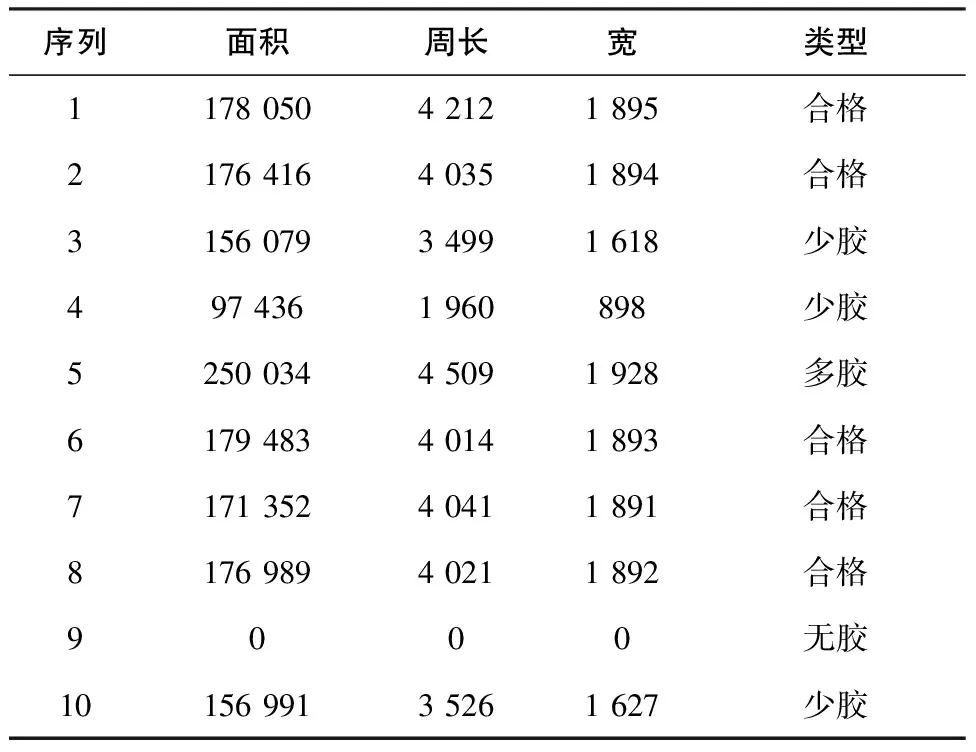
表3 实验结果 像素(Pixel)
3 结语
研究了牙刷表面注胶的质量检测方法,根据该类牙刷注胶表面的颜色信息,将图像从RGB彩色空间转化到HSV彩色空间进行分割,提取图像特征并进行判断。实验表明,采用该视觉检测方法能够实现牙刷表面注胶质量的检测,处理效果良好,达到预期检测目标。
[1] 王耀南, 陈铁健, 贺振东,等. 智能制造装备视觉检测控制方法综述[J]. 控制理论与应用, 2015, 32(3):273-286.
[2] 王奇. 基于机器视觉的外螺纹表面缺陷检测系统研究[D]. 重庆:重庆大学, 2015.
[3] 穆向阳, 张太镒. 机器视觉系统的设计[J]. 西安石油大学学报(自然科学版), 2007, 22(6):104-109.
[4] 刘同海, 滕光辉, 付为森,等. 基于机器视觉的猪体体尺测点提取算法与应用[J]. 农业工程学报, 2013(2):161-168.
[5] 张丽静, 孙杰, 殷晓宇. 基于HSV颜色空间的车牌定位方法[J]. 微计算机信息, 2008, 24(7):253-254.
[6] 马玲, 张晓辉. HSV颜色空间的饱和度与明度关系模型[J]. 计算机辅助设计与图形学学报, 2014, 26(8):1272-1278.
