基于EKF落点预测的二维弹道修正弹制导方法
2018-07-04普承恩王良明
普承恩,王良明,傅 健
(南京理工大学 能源与动力工程学院, 南京 210094)
射击精度是评价武器系统性能的重要指标,二维弹道修正弹作为一种新兴弹道修正弹药,结合了卫星测量技术,整体成本较低,打击精度较高,并且能提高有效杀伤力、减小武器系统附带伤害。导弹的控制系统复杂,可以通过连续导引来修正弹道,达到精确制导的目的,而二维弹道修正弹的控制系统较简单,全弹道只进行一次或多次修正,命中精度较导弹差,因此,在不增加成本的情况下进一步提高二维弹道修正弹的命中精度是未来研究的重要方向。
基于落点预测算法的弹道修正控制方法是当前各国研究的热点[1]。
文献[2]采用拓展卡尔曼滤波对雷达测量的弹丸进行了飞行参数和气动参数的辨识并预报了弹丸的落点,取得了较高的落点预报精度;文献[3]采用衰减记忆法扩展卡尔曼滤波递推算法进行弹道修正弹的落点估计;文献[4]采用无迹卡尔曼滤波(UKF)对雷达测量的弹丸弹道参数进行了滤波,外推得到弹丸落点;文献[5]将六自由度非线性弹道模型进行线性化,并结合拓展卡尔曼滤波进行落点估计,得到了较高的估计精度;文献[6]采用了线性化弹道模型进行落点估计,并利用预测点与目标点之间的偏差设计了制导律;文献[7]采用了神经网络方法进行落点估计,并利用预测点与目标点之间的偏差设计了制导律。
前人对落点预测的方法作了较多探索,取得了许多成果。但是在制导律设计方面还没有将拓展卡尔曼滤波与敏感矩阵结合的先例。考虑到弹载计算机的快速性、实时性,这里采用了3自由度质点弹道模型,既保证了弹道计算精度,又提高了计算速度;采用欧拉法将非线性质点弹道模型离散化,利用拓展卡尔曼滤波器对卫星测量的实际弹道参数进行估计后得到实际落点坐标,而后采用微小扰动法确定出近似敏感矩阵,根据敏感矩阵确定射程偏差量与弹道倾角偏差量的关系,据此给出加速度制导指令,最后结合蒙特卡洛模拟打靶法验证此制导律的可行性与有效性。
1 EKF落点预测算法
1.1 质点弹道模型
弹箭的飞行环境十分复杂,这对弹载计算机的要求非常严格,弹载计算机不仅要接收卫星测量参数,还要进行滤波并计算出弹丸的预测落点和制导指令。为了保证弹载计算机的快速性、实时性[8],本研究采取简化的质点弹道模型进行相关的计算,质点弹道模型[9]为
(1)
式中:Vx,Vy,Vz为弹丸的速度在地面坐标系下的分量;x,y,z为弹丸在地面坐标系下的位置坐标;Wx,Wz分别为纵风和横风速度;Vr为相对速度,其计算公式为
ρ为空气密度函数;S为弹体特征面积;m为弹丸质量;Cx(Ma)为阻力系数;g为当地重力加速度。选取状态变量为
则状态方程为
(2)
其中:
式(2)中:w为模型噪声,是为了补偿质点弹道模型对真实运动描述的不足而引入的高斯白噪声,w服从均值为零方差为Q的正态分布,w~N(0,Q)。
1.2 卫星测量模型
采用卫星测量的二维弹道修正弹是利用弹上的卫星信号接收机来获得弹丸当前时刻的位置和速度参数,即Vx、Vy、Vz、x、y、z。因此观测矢量为
观测方程为
y=h(X)+v
(3)
其中:v为量测噪声,服从均值为零,方差为R的高斯分布,即v~N(0,R)。
1.3 EKF算法
EKF算法是经典卡尔曼滤波算法的推广,经典卡尔曼滤波算法只适用于线性系统,而状态方程(2)是非线性的,必须采用适合于非线性问题的滤波算法,拓展卡尔曼滤波正是解决此类非线性估计问题的算法。
EKF算法使用的是离散时间非线性模型,在进行滤波前,需将其离散化。采用欧拉法将方程组(2)离散化,得到离散化后的状态模型和观测模型如下
Xk+1=Xk+f(Xk)T+wk
(4)
yk+1=h(Xk)+vk
(5)
其中T为卫星采样周期
EKF算法具体过程分为4步:
第一步 初值初始化
(6)
(7)
第二步 状态预测
(8)
(9)
第三步 计算增益
(10)
第四步 状态更新
(11)
Pk+1|k+1=(I-Kk+1Hk+1)Pk+1|k(I-Kk+1Hk+1)T+
(12)
式(6)~式(12)即为拓展卡尔曼滤波过程,其中yk+1为量测值,由式(5)得到。Φ为状态转移矩阵,H为观测矩阵,它们都是雅各比矩阵,其计算表达式如下
经过以上步骤的滤波估计以后,得到弹丸的弹道参数估计值,取最后一时刻的估计结果代入理想质点弹道模型即可计算出预测落点。
2 敏感矩阵导引律设计
2.1 落点预测导引原理
落点预测导引的原理是利用前面预测得到的落点坐标与目标点的位置坐标进行比较,得到偏差量,根据偏差量产生制导控制信号,从而修正弹道。射程修正原理如图1所示,侧偏修正原理如图2所示。
Δx=xp-xt, Δθ=θc-θd
其中:xp为预测落点横坐标;xt为目标点横坐标;θc为当前弹道倾角;θd为期望弹道倾角。
图2中,az为侧偏修正加速度指令, Δz为预测落点与目标点之间的侧偏偏差, Δψ为当前弹道偏角与期望弹道偏角之间的偏差,计算公式为
Δz=zp-zt, Δψ=ψc-ψd
其中:zp为预测落点纵坐标;zt为目标点纵坐标;ψc为当前弹道偏角;ψd为期望弹道偏角。
(13)
同理,也可得到侧偏修正加速度指令
(14)
式中,κ为导引系数。
2.2 敏感矩阵法
从式(13)、式(14)可以看出,俯仰和侧偏的加速度指令由 Δθ和 Δψ决定,确定这两个偏差角有两种方法,第一种是采用射表法,第二种是采用敏感矩阵法。射表法就是通过查找射表,找到一组 Δθ与 Δx、 Δψ与 Δz的数据,然后根据当前的 Δx和 Δz插值确定 Δθ和 Δψ;敏感矩阵法就是通过敏感矩阵确定 Δθ和 Δψ,本研究采用敏感矩阵法。敏感矩阵关系方程可以表示为
(15)

(16)
通过敏感矩阵法确定弹道倾角轻微扰动量与落点偏差之间的关系如表1所示,从表1可以看出εθ对εz的影响很小,εψ对εx的影响也很小,可近似取
(17)
将式(16)、式(17)代入式(15)得:
(18)
根据式(18)求出Δθ和Δψ后,代入式(13)、式(14)便可以得到修正加速度指令,进行弹道修正。
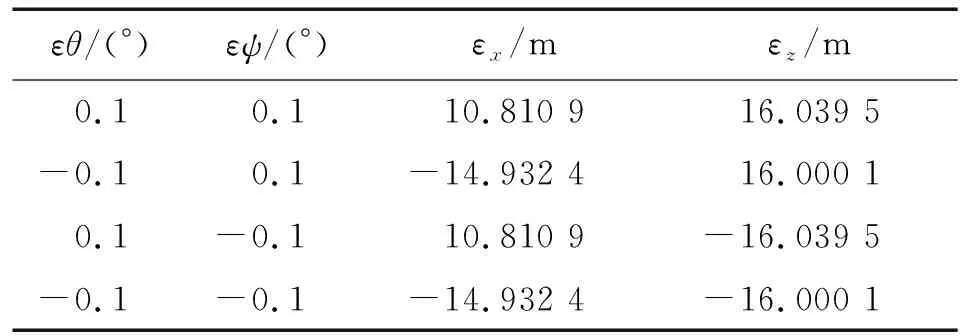
表1 轻微扰动量与落点偏差量
3 仿真结果
3.1 EKF落点预测仿真
针对炮射卫星测量二维弹道修正弹,进行数值仿真,仿真条件为无风,标准气象条件,初速V0=900 m/s,初始射角θ0=35°。卫星测量的数据由理想弹道数据叠加测量随机误差而成,其中测量误差取:σX=[10 m 10 m 10 m 0.3 m/s 0.3 m/s 0.3 m/s]T卫星采样周期0.01 s,发射2 s后开始测量。对全弹道进行弹道滤波,文中选取第20~35 s时刻的弹道参数进行落点估计。仿真结果如图3、图4所示。
图3~图4分别是二维弹道修正弹的速度估计误差和位置估计误差曲线,可看出,速度估计误差和位置估计误差都在0.5 s内完成了从初始误差趋于零的过程,之后时间的速度估计误差始终保持在0.1 m/s以内,位置估计误差保持在2 m以内,表明了拓展卡尔曼滤波对弹道参数估计精度高、收敛速度快,应用于弹道参数估计的有效性好。
3.2 蒙特卡洛打靶精度分析
采用蒙特卡洛模拟打靶1 000次,保存每一次打靶得到的落点坐标与目标点之间的位置偏差(Δxi,Δzi),通过数据处理得到射程和侧偏的均方差σx、σz。现代武器系统精度评估的指标通常采用圆概率偏差(CEP),其近似计算公式[10]为
其中Ex、Ez为中间误差,计算公式为
Ez=0.674 5σz,Ex=0.674 5σx
假设控制系统理想工作,舵机进行一次弹道修正,启控时刻为第35 s,修正时间为10 s,仿真得到蒙特卡洛打靶结果,计算得到的落点散布参数如表2所示,质点弹道仿真结果如图5~图6所示,俯仰和侧偏方向修正加速度指令如图7所示,落点散布如图8~图9所示。

表2 落点散布 m
从表2看出,无控弹的圆概率偏差为92.913 m,采用落点预测制导后二维弹道修正弹的圆概率偏差为14.613 m;图5~图6是在纵向平面内和水平面内的质点弹道仿真结果,可看出,经过修正后的弹道逐渐向理想弹道靠近;图7是俯仰方向和侧偏方向的修正加速度指令,由于控制系统只执行一次修正,因此修正加速度从35 s时刻开始出现,45 s时刻消失,其余时间指令为零;从图8~图9看出,经过制导控制后,二维修正弹的落点散布明显减小,说明落点预测制导律的可行性好。
4 结论
将拓展卡尔曼滤波与敏感矩阵法结合设计了一种落点预测导引律,针对敏感矩阵不易求解的问题,采用微小扰动得到了近似敏感矩阵并进行仿真验证。仿真结果表明:拓展卡尔曼滤波器估计弹道参数算法的精度高、收敛速度快,可满足弹载计算机的快速性和实时性的要求;基于敏感矩阵设计的制导律有效减小了圆概率偏差,显著提高了命中精度,对于控制系统比较简单的二维弹道修正弹来说,具有实际工程参考意义。
[1] 陈浩,刘秋生,杨洋.修正弹落点预测方法[J].火力与指挥控制,2015,40(12):177-179.
[2] 史金光,刘猛,曹成壮,等.弹道修正弹落点预报方法研究[J].弹道学报,2014,26(2):29-33.
[3] 戴明祥,杨新民,易文俊,等.用于卫星制导弹药落点预测的卡尔曼滤波算法[J].弹箭与制导学报,2013,33(4):91-93.
[4] 曾凡桥,陈国光,高小东,等.UKF滤波算法在弹箭落点估计中的应用研究[J].弹箭与制导学报,2017,37(1):73-76.
[5] LEONARD HAINZ III C,COSTELLO M.In Flight Projectile Impact Point Prediction[C]//AIAA Atmospheric Flight Mechanics Conference and Exhibit,2004.
[6] WOOSUNG PARK,JOONGSUP YUN,CHANG-KYUNG RYOO,et al.Guidance Law for a Modern Munition[C]//International Conference on Control, Automation and Systems,2010.
[7] WOOSUNG PARK,CHANG-KYUNG RYOO,BYOUNG SOO KIM,et al.A New Practical Guidance Law for a Guided Projectile[C]//AIAA Guidance,Navigation,and Control Conference,2011.
[8] 徐明友.高等外弹道学[M].北京:高等教育出版社,2003.
[9] 杨荣军.旋转制导炮弹飞行弹道及控制系统设计方法研究[D].南京:南京理工大学,2012.
[10] 韩子鹏.弹箭外弹道学[M].北京:北京理工大学出版社,2008.
