车载LiDAR在城市部件采集中的应用
2018-07-03袁德宝张帆宇扬侯晓波中国矿业大学北京地球科学与测绘工程学院北京100083
袁德宝,张帆宇扬,梁 晨,侯晓波,马 旭(中国矿业大学(北京)地球科学与测绘工程学院,北京 100083)
数字化城市管理系统[1]是一种基于城市数字化的综合指挥系统,它将城市划分为若干单元网格,并在此基础上绘制数字化地图,利用现代数字信息技术,将传统地图上的数学要素、地理要素和辅助要素与城市服务及相关部件相结合,通过采集城市部件的位置、属性等信息,对相关数据进行统计,实现城市管理的数字化(如图1所示)。传统的城市部件位置信息采集[2]一般都是通过GPS进行外业采集,然后经过内业分类汇总处理后,将数据进行入库,便于使用查询。
外业GPS测量过程受外界环境影响较大[3],测量人员由于熟练程度不同,往往会在部件采集过程中出现或多或少的错误,如输入数据或部件类型错误等。这些人为误差不仅导致传统部件信息采集方式效率低,而且精度受测量员的能力影响较大;而GPS测量方式又造成了城市部件更新周期慢、现势性差等问题;同时多数城市部件在车流量较大的马路上采集信息时存在一定的安全隐患,这些因素均给城市部件采集工作带来了一定的难度。因此,需要一种更先进的设备技术来解决这些问题,以提高外业工作效率。
车载激光雷达作为移动测量系统的一种[4],车身搭载有全球定位系统(GNSS),为车辆提供位置信息,车辆顶部放置有激光扫描器和数码相机,并在车身中集成相关加速度传感器、陀螺仪等惯导传感器,为航位推算提供物理数据,提高定位精度及稳定性。由于能够在短时间内获取大量点的精确位置及影像信息,故将其应用在地理信息采集上能够大大提高工作效率,缩短外业测量时间。同时,在车载LiDAR测量时,测量人员是在车内,提高了外业测量员的安全保障。这些都较好地满足了城市部件信息获取的要求,因此车载LiDAR在城市部件采集方面有很大的研究价值。
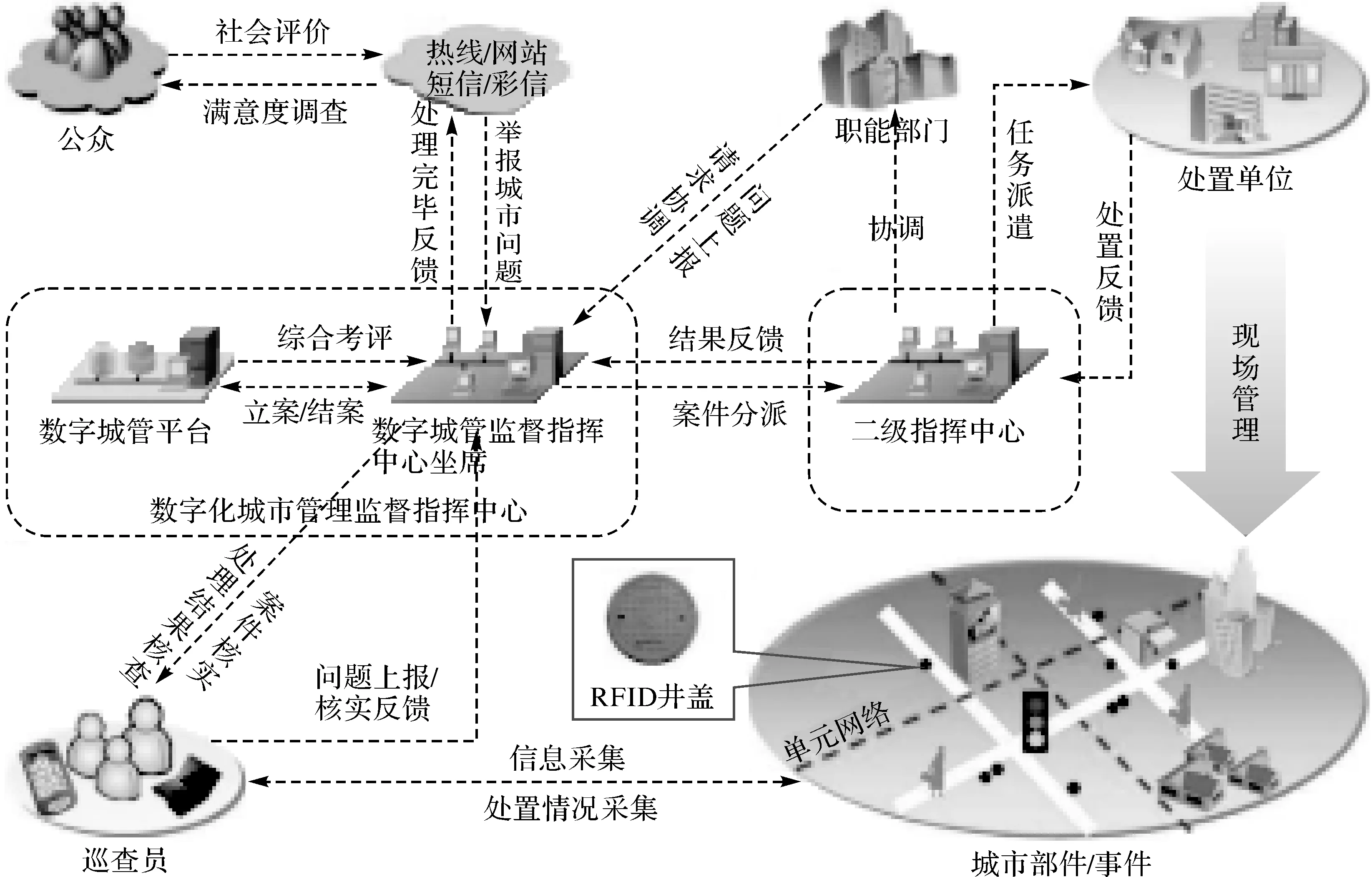
图1 数字化城市管理系统
1 车载LiDAR部件采集
此次研究所用的车载移动空间测绘系统是Trimble MX8。该系统包括POS LV定位定姿系统、传感器机身[5]、传感器平台,以及供电存储系统、数据采集软件、数据处理及分析软件,见表1。激光雷达子系统参数见表2。精度符合数字城管部件采集规程[6]规定的精度要求,见表3。
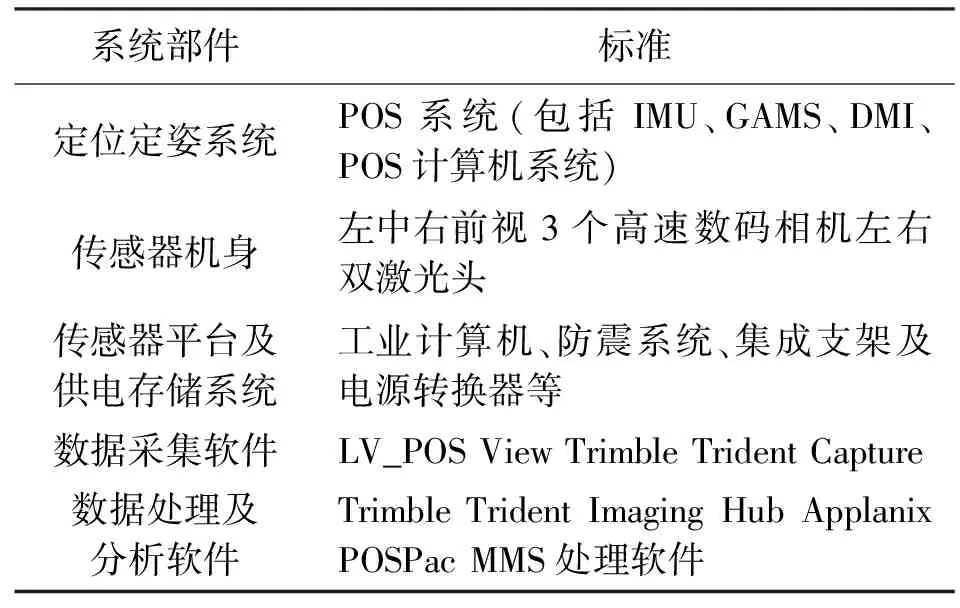
表1 Trimble MX8系统技术规格
1.1 测区概况
此次研究采集数据区域位于北京市石景山区某路段,全长500 m,道路为双向四车道,两旁有行树、护树设施、交通标志牌、路灯、垃圾箱等精度等级较高的点状城市部件,具有一定的代表性。该测区地势平坦、视野开阔,GPS信号较好。
表2 激光雷达子系统参数
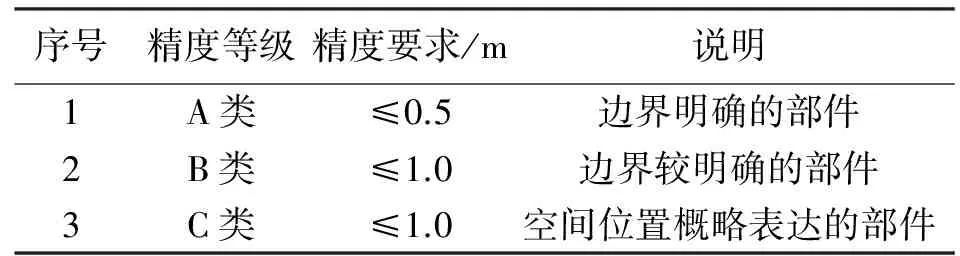
表3 数字城管部件采集精度要求
1.2 技术路线
使用车载LiDAR进行外业部件采集的主要工作有两部分,分别为车载LiDAR测量和GPS基准点测量。其中,车载LiDAR测量为原始数据采集,数据精度不能保证,需要与基准点结合进行平差,从而达到部件采集的精度要求。总体技术路线如图2所示。
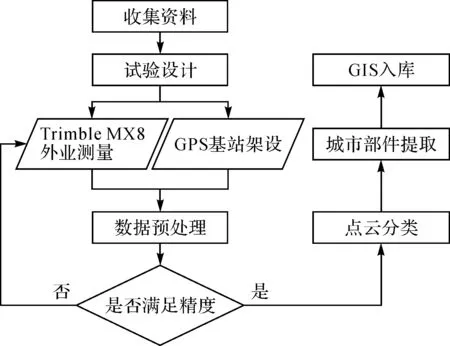
图2 技术路线
1.3 数据采集
在进行采集之前,根据已有资料,先对道路进行勘踏,制定行驶路线和基准点选取,明确待采集的城市部件种类。进行基准点位置选取时,需要选择地理位置开阔、远离大型信号发射源和大面积反射面的地方设置基准点。此外,在进行数据采集时,为避免立杆类部件上部发生倾斜或弯曲,均要尽可能扫描到部件底部的点以保证精度。
1.4 数据处理
外业采集作业完成后,需要对所采集的数据进行校正处理,以获得目标点的空间坐标。首先要将惯导系统(IMU)[7]与GPS基站信息进行融合,得到位置姿态(POS),然后由POS信息可推算出车载LiDAR的实时位置姿态信息和车辆的位置坐标(XC,YC,ZC),根据式(1)[8],通过获取激光发射角δ、高低角度μ,将激光发射点与目标点的距离(d)、角度值(θy,θp,θr)相结合即可计算出目标点的空间坐标(X,Y,Z),计算流程如图3所示。
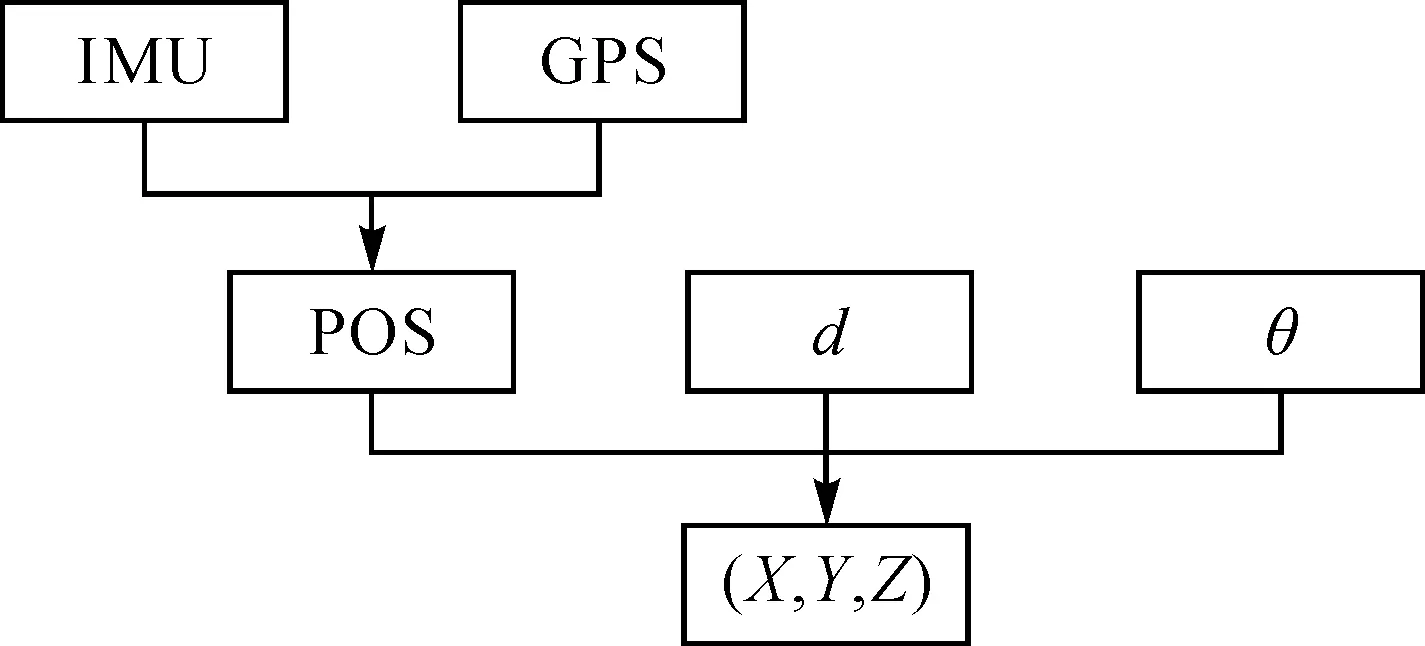
图3 车载LiDAR点云坐标计算流程
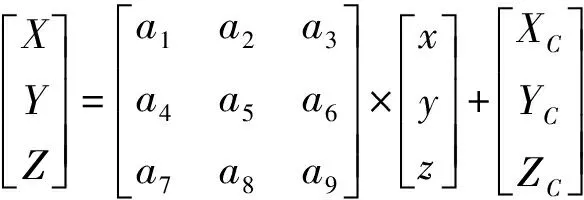
(1)
式中,x=dsinμcosδ;y=dsinμcosδ;z=dcosμ;a1=cosθycosθr+sinθpsinθr;a2=sinθycosθr-cosθysinθpsinθr;a3=cosθpsinθr;a4=-cosθpsinθy;a5=cosθycosθp;a6=sinθp;a7=sinθysinθpsinθr-cosθysinθr;a8=-cosθysinθpcosθr-sinθysinθr;a9=cosθpcosθr。
由于车载LiDAR扫描后存在精度不高、原始数据量大等问题(如图4所示),需要进行精度优化、点云抽稀和去噪,以提高车载LiDAR扫描点云的精度,减少数据处理压力。
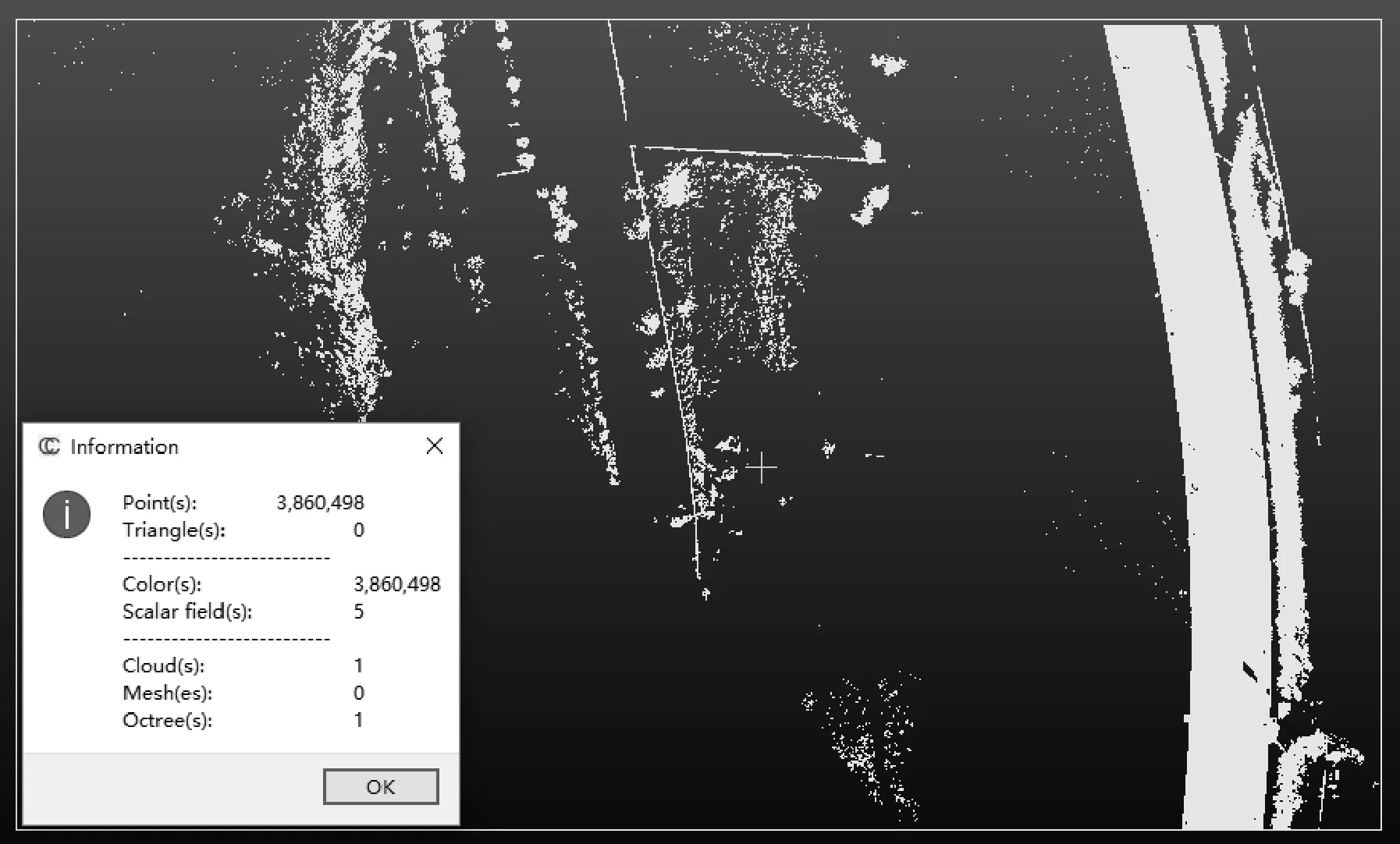
图4 原始点云数据
在扫描点云精度优化方面,需对获取到的车辆GPS坐标信息进行差分计算。常用的差分计算方法分为广播差分法和自由设站差分。为满足规范对部件采集的精度要求,笔者采用自由设站法,利用架设的GPS基站测量出的地面控制点数据来对扫描数据进行整体平差,从而获得精度较高的车辆空间位置。同时,需要对原始扫描数据进行数据预处理[9],将3倍标准差值作为极限误差,对超限数据进行剔除,通过系统平差及精度优化,最终其平面精度及高程精度均达到5 cm以内。
在点云抽稀、去噪方面,需要对扫描到的无用点进行剔除,从而减小数据量,降低计算复杂度。由于在城市部件信息采集中,均以道路边界外50 m为界限,因此先将道路东西边界50 m外的点云数据进行剔除,结果如图5所示。
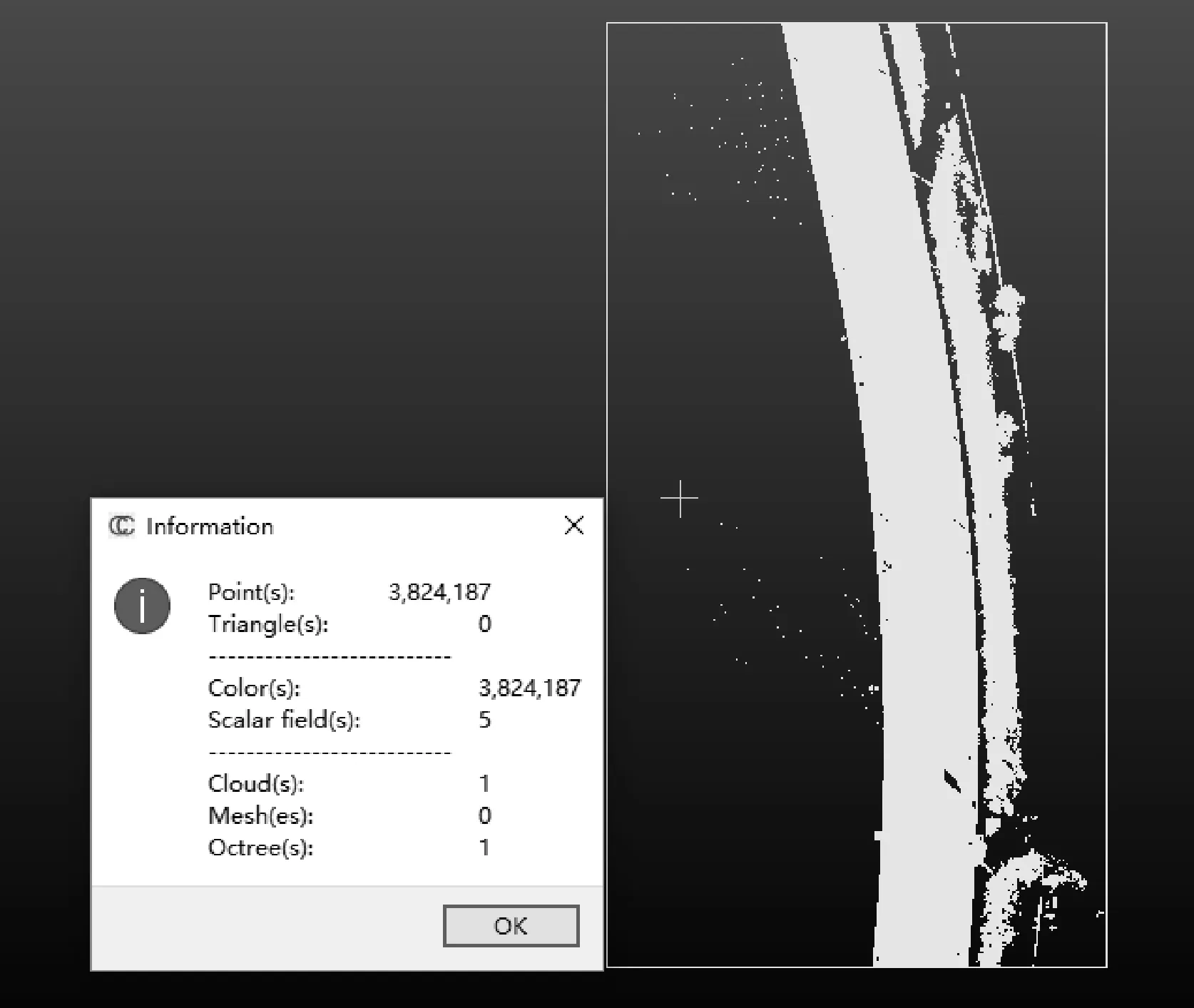
图5 道路边界点云剔除
同时,考虑采集到的点云数据主要用于部件坐标提取,因而大量描述建筑物立面或道路平面的点云数据是不需要的。由于扫描过程中存在误差,而这些误差会产生一些离群点,需要对其进行去噪。在此,笔者对其进行Octree点云抽稀,并使用SOR(statistical outlier removal)滤波器移除离群点。其中,Octree是三维空间中点的重要数据结构,利用Octree结构下的数据,可以高效地对点云进行压缩。SOR利用统计分析原理,通过对点的邻域进行统计分析,计算每一个点到其邻近点的平均距离,对其标准范围之外的点进行剔除,从而达到移除测量离群点的目的。
通过多次对比试验,subdivision level最佳值为11,SOR用于平局距离估计的点数和标准差乘阈值(nSigma)分别取10和2时,能够在保留城市部件特征的前提下,尽量缩减点云数量,获得较好的处理结果(如图6所示)。经过点云预处理,将原始点云的3 860 498个点,缩减至945 294个点,精简了75.51%,减小了后续城市部件提取的复杂度。
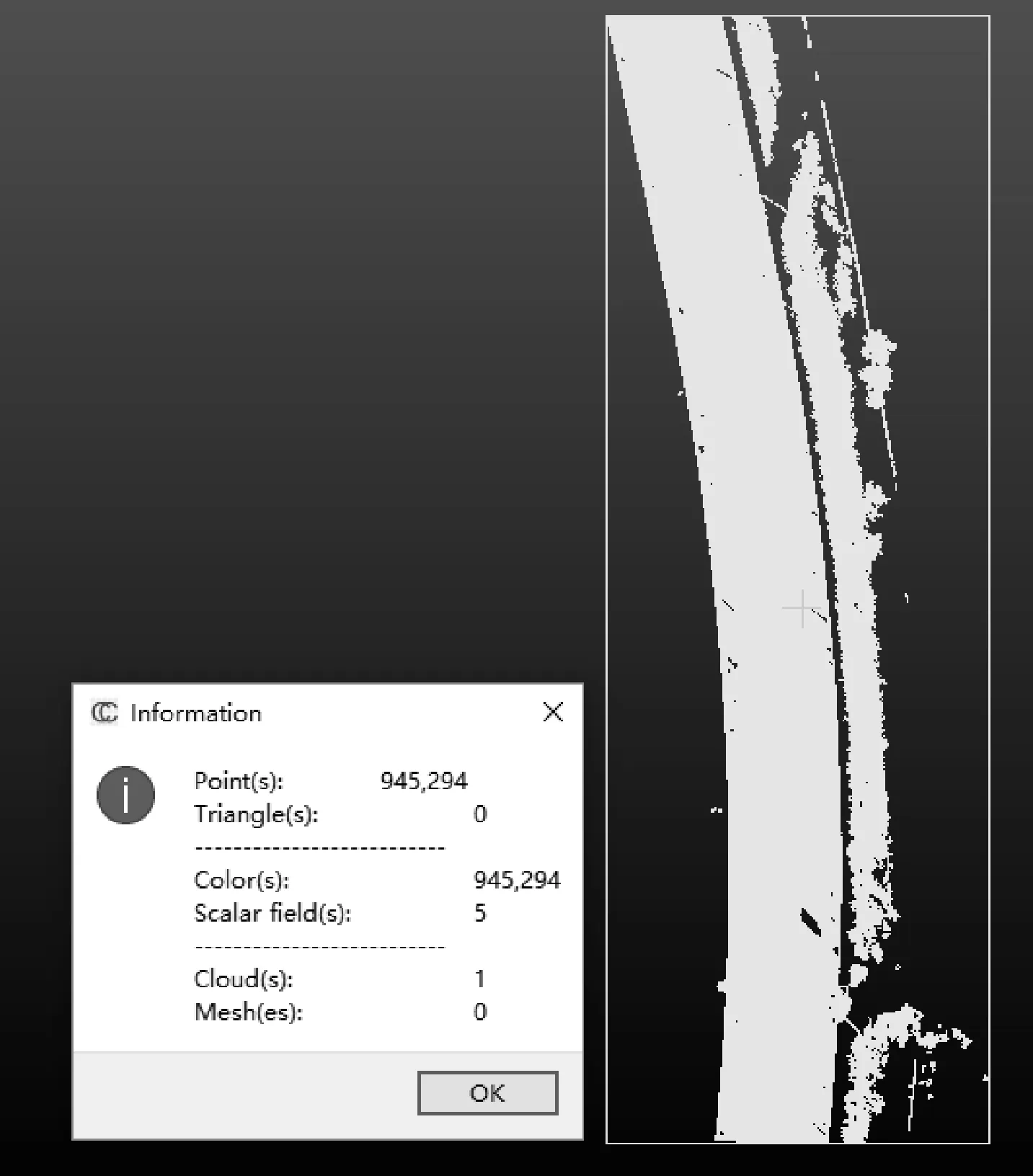
图6 点云抽稀去噪
在此基础上,对处理过的点云数据进行分类处理,得到各部件的点云,部分部件如图7所示。
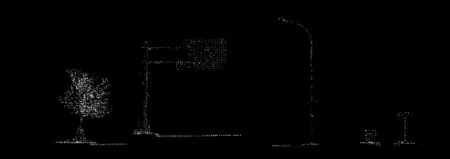
图7 处理后各部件点云数据
在对点云数据进行过滤提取后,需要采集部件坐标点。坐标采集时,为保证精度,必须采集到部件中心点,由于行树、路灯、交通标志牌等杆状地物只有表面点云数据,因此需要对较粗的对象点进行位置平移至底部中心来满足要求。
2 成果精度及分析
测区位于北京市石景山区城郊,地区空旷,周围无大型辐射源,CORS及GPS信号较好,因此试验采用CORS复测的方法进行数据验证。通过对扫描路段进行复测,将两种方法的测量结果进行比较。根据式(2)和式(4)[10],以CORS复测坐标值为真值,计算车载LiDAR扫描点云提取点与真值的坐标及中误差。
(2)
(3)
(4)
式中,(x,y,z)为点云数据坐标值;(X,Y,Z)为实测数据坐标值;n为点数。
在该路段,试验共测得171个部件点,其中包括行树、护树设施、交通标志牌、路灯、垃圾箱等部件,其数据及精度对比见表4。
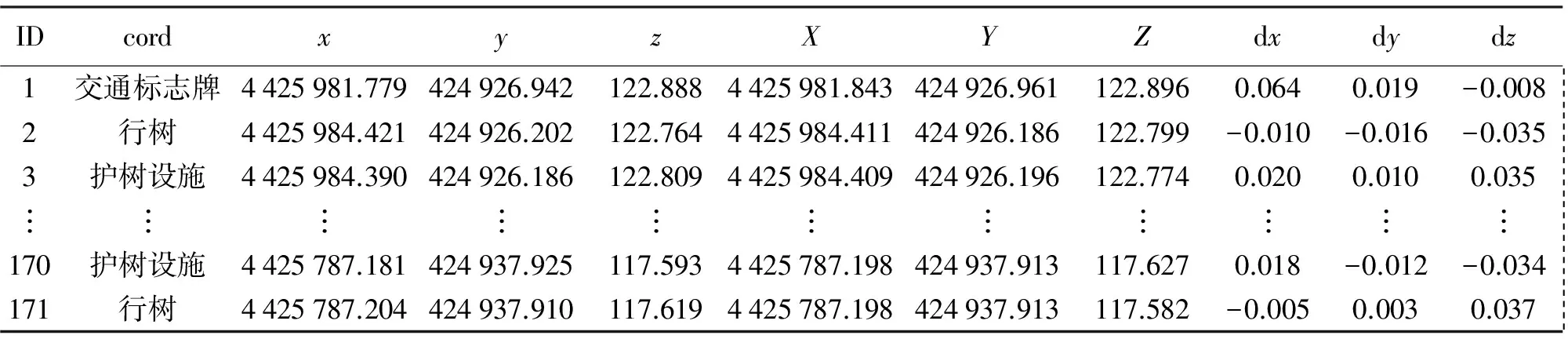
表4 数据点精度对比 m
根据表4的数据,通过式(5)得出,在试验路段,x方向中误差为0.081 m,y方向中误差为0.032 m,z方向中误差为0.059 m,其平面误差分布散点图如图8所示。由图可知,车载LiDAR扫描点与传统CORS测量点差值均未超过0.15 m,除个别点外,其余点差值均在0.1 m以内,精度远远高于数字城管部件采集的A类精度要求,将两种数据导入ArcGIS中进行对比管理,也取得了很好的效果(如图9所示)。综上所述,使用车载LiDAR获取城市部件的精度完全符合要求,便于管理。
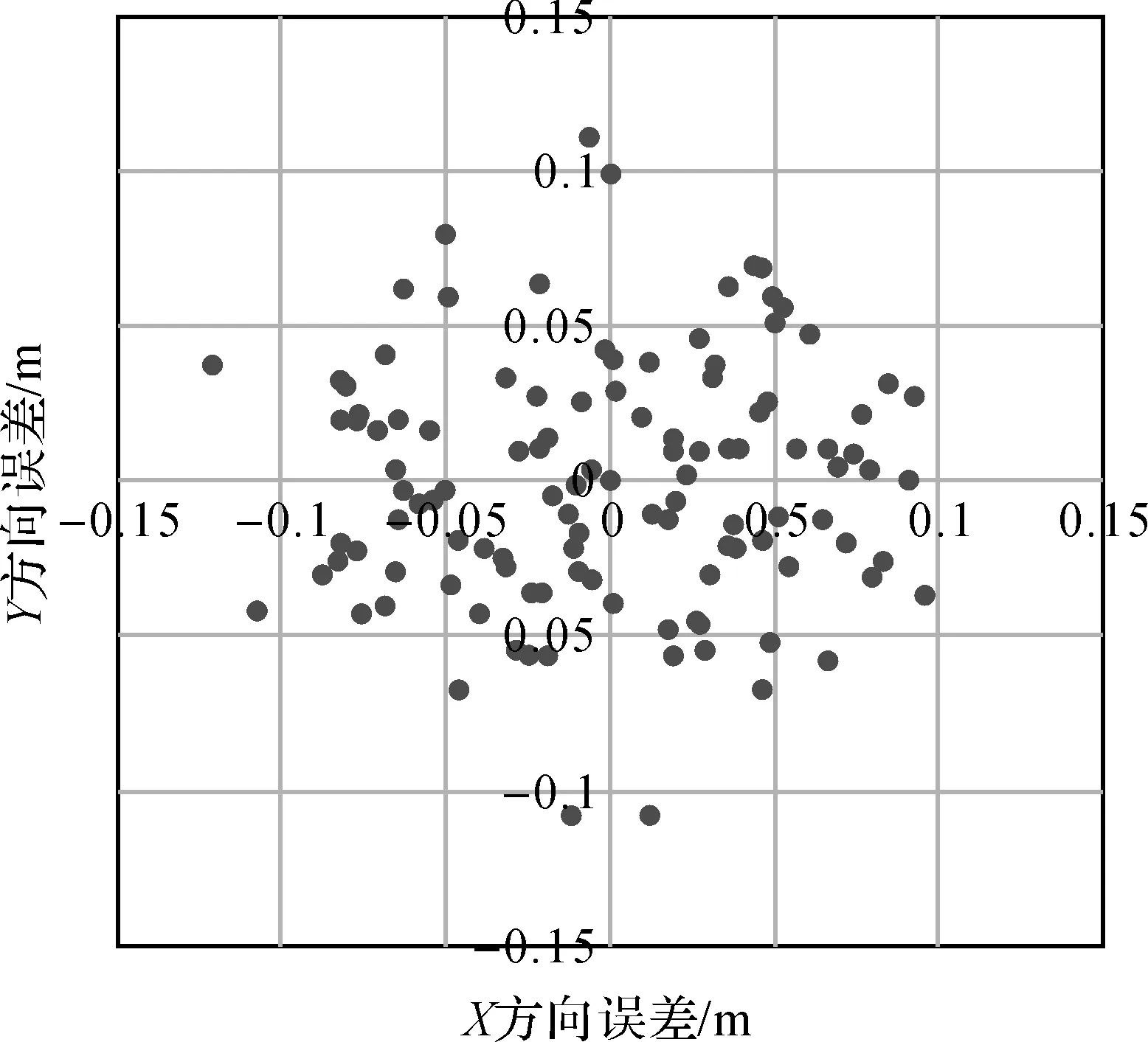
图8 平面误差散点分布
图9 ArcGIS数据管理
3 结 语
综上所述,将车载LiDAR应用在城市部件采集中可以使部件获取速度大大提高,改变了传统部件采集时需要测量员在公路上实地观测的方式, 大大提高了测量员的安全性,同时所获取到的部件位置也较传统的获取方法更为精确。虽然其优势突出,但该方法仍然存在许多不足,如采集数据时对道路进行无差别扫描记录,造成了大量冗余数据,增加了内业的工作量。因此,如何高效地对城市部件信息进行选择性采集,减少无部件区域的扫描频率,快速提取所需部件,同时与现在的城市管理系统进行对接等,是未来需要进一步研究的问题。
参考文献:
[1] 赵云峰,张彭.数字化城市管理系统的扩展应用研究[J].价值工程,2015(30):18-19.
[2] 李淦,鲁雪松,陈建伟.城市部件数据建库研究[J].价值工程,2014(8):227-228.
[3] 邹小兵.施工测量中测绘新技术的合理应用[J].科技与企业,2012(19):214-214.
[4] 张传帅.基于车载LiDAR系统的高精度路面高程测量应用研究[D].焦作:河南理工大学,2013:5-8.
[5] LIU J,CHENG S,OUYANG H,et al.The Institute of Geographic Sciences and Natural Resources Research,CAS[J].Journal of Geographical Sciences,2004,14(S1):97.
[6] 范况生.城市网格化管理研究与实践[D].上海:华东师范大学,2006:8-12.
[7] 傅瑜,陈阳,李延军,等.升力式再入飞行器全程三维自主制导方法[J].哈尔滨工业大学学报,2016,48(4):97-103.
[8] 徐逢亮,李树楷.机载激光影像制图系统中的3维定位技术[J].测绘学报,2000,29(2):137-141.
[9] 邹晓亮,韩涛,赵桂华,等.机载LIDAR测量原理与数据滤波分类处理[J].电子测量与仪器学报,2008,22(Z2).
[10] 俞涛.散乱点云精简与自动拼接技术研究[D].南昌:南昌大学,2015:20-22.
[11] 史杰.城市综合管理系统的设计与实现[D].天津:南开大学,2011:28-33.