一种基于高度差异的点云数据分类方法
2018-07-03马东岭王晓坤李广云信息工程大学导航与空天目标工程学院河南郑州45000山东建筑大学测绘地理信息学院山东济南500
马东岭,王晓坤,李广云(. 信息工程大学导航与空天目标工程学院,河南 郑州 45000; . 山东建筑大学测绘地理信息学院,山东 济南 500)
机载LiDAR测量技术是一种有广阔前景的地表信息获取技术,它融合了激光测量、飞行器姿态控制、高速GPS定位等多种前沿技术[1],具有作业安全、速度快、主动式测量等优势。基于上述优势,该技术在森林调查、环境监测、地形测绘等方面被广泛应用[2]。但是现阶段,点云的数据处理仍存在相应的问题需要解决,如激光点云数据含有目标对象表面丰富的三维信息,但是这些信息是通过大量扫描点的点位信息体现的,进而导致点云信息储存量大、调用困难,并且无法作为矢量信息被直接利用。为了解决这个问题,需要LiDAR点云数据处理中的一项重要的技术——点云分类技术[3]。点云分类是将获取到的机载LiDAR点云数据分离为不同种类,如地面点类、建筑点类等。
对于激光点云分类问题,目前已有众多学者进行过诸多研究。主要集中在从LiDAR获取的激光点云数据分类单一地物的研究,大多数研究集中在对于道路、植被、建筑分类等方面。如关于地面点云分类,文献[4]提出了一种通过继承的方式使用多分辨率的小格网分类算法, 从机载LiDAR点云中获取高大植被覆盖地区的DEM。关于植被点云分类,文献[5]将高差作为SVM特征变量输入,使用SVM方法结合径向基函数,完成植被点云分类;文献[6]使用了Axelsson改进的加密TIN的方法对地面点和非地面点云分类,并通过使用高清航摄影像进一步分类出玉米叶面点云。关于建筑物与构筑物点云分类,文献[7]采用一种估计轮廓密度的方法,根据原始LiDAR数据通过计算机求得所需网格密度的阈值,进而通过该值提取建筑物外表层格网,进而利用该格网分类整个建筑物外形和建筑物棱角;文献[8]通过利用点云的相邻点关系和点密度估计,从点云数据直接生成的DSM数据中,直接分类出建筑表面点云;文献[9]用激光点云特征和点云构成的法向量来判断植被和墙面点并利用连通成分分析分类建筑点,结合DTM获取建筑屋顶点云。关于水体的分类,文献[10]除了利用LiDAR回波强度信息计算OAI,还采取了选取对象面积和OAI构建特征空间提取水体的方法;文献[11]提出了采用双层格网法分类狭长水体的方法。关于道路的分类,文献[12]使用基于边长和面积阈值的约束 Delaunay 不规则三角网方法精化初始道路点云的方法。
以上算法大都分类手段简单,处理复杂,细节处理不细致,因此寻找一种更为理想的方法迫在眉睫。本文基于现有的激光点云数据处理手段,提出基于高度差值的二次导数的建筑物、植被分类点云的方法。该方法在建筑物、植被点云分类中有分类清晰、界线合理的优势。
1 点云分类原理
高程差值信息是人造建筑和绿色植物的重要区分特征,可以用这个特征来区分人造建筑和绿色植物点云。建筑表面比较规则,除了边缘地区变化比较剧烈外,其他地方基本没有剧烈变化,比较连续;相反,由于植被生长不规则,因而植被点云没有连续性,变化剧烈。因此利用高差信息和扫描线方向的二次导数可以用来区分相邻点云是否连续,进而区分出建筑物、植被。
1.1 建筑物点云分类原理
假定建筑模型是平面连接构成,在同一噪声水平上的、同一平面上相邻的TIN面片有相同的方向。因此,在相邻扫描线上的点在高度差的二阶导数为零的情况下,这些点在一条直线上。屋脊线在其他方向的高度变化会导致二阶导数为零。因此,建筑物的几何模型沿着扫描线形成。
点在直线上为

(1)
点为断点为
(2)
式中,x为扫描线的方向变化的值;z为高差。这个公式可以作为点云分类的主要区分标准。由于点云由密集的点组成,这些点除了大面积的高差相似点,还包括不规则屋顶和高斯偏差估计点及离散点云。通过给后两者点云附加阈值来分离相应的点云。因此建筑物模型的描述长度DLbuildings包含3个部分:
(1) 参数模型中的二阶导数为零的扫描线DLpar。这个模型是固定的,即Cconstant。
(2) 从参数模型的高斯偏差的统计模型DLgauss和近似房屋边线模型DLroof。
(3) 断点的统计模型DLbreak(类似于植被) 。
后两者需要相应判别标准nroof和nbreak来判读是否为建筑物模型。则有
DLbuildings=DLpar+(DLroof+DLgauss)nroof+DLbreaknbreak
(3)
其中
DLpar=Cconstant
(4)
(5)
(6)
(7)
nroof+nbreak=ntot
(8)
式中,L为建筑物的长度;Rxy、Rz为定义构建的搜索空间的平面尺寸和高度;σ2为方差;ε为数据的分辨率;lb为以2为底的对数;ntot为辨别标准的集合。通过该描述长度可以获得建筑物内部点云、边缘点云和离散破碎点云,通过这些点云来共同构成建筑物点云。
1.2 植被点云分类原理
首先,植被为天然生长形成,与人造的建筑物有明显区别。其中植被生长存在随机性,形状不像建筑物一样整齐、规律,因此,植被点云在边缘部分存在高差突变。其次,由于建筑物多为实体堆砌而成,而植被枝叶之间会有大大小小的空隙且激光可以穿过植被表层,因此在内部也存在高差上的不连续性。根据植被与人造建筑的不同,采用类似分类人造建筑断裂线的方式。植被点的模型为随机分布的二阶导数
(9)
式中,x为扫描线的方向;z为高差。点为随机的植被点。由于植被不存在大区域的高差相似和形状规律区域,只需要寻找高差不规则变化区域,因此利用植被点云不连续性特性,植被的描述长度DLveget被假定类似于破裂线的随机统计模型
DLveget=DLrandntot
(10)
(11)
其中,建筑模型和植被模型中存在平衡高斯偏差估计和最优断点数的最小值,将该最小值作为区分建筑和植被的阈值。
2 试验与结果分析
试验数据采用Autzen_Stadium地区的点云数据。首先利用TerraSolid软件,对试验地区的机载LiDAR点云数据进行滤波、分类地表点云等前期处理工作[13-15]。然后,利用本文提出的基于高度差值的二次导数的建筑物、植被点云分类方法对TerraSolid软件初步预处理的点云结果进行分类,得到完整的人造建筑、植被点云。流程如图1所示。
2.1 通过TerraSolid软件分离地面点云
对于原始点云数据,本文利用TerraSolid软件进行降噪等点云预处理工作。点云通过降噪,将其中的云、鸟等点云剔除出去。然后,将经过降噪后的点云通过最低点迭代法[16]将地面点云初步提取出来并手动修正将地面点云分类出来,剩下以建筑、植被为主体的目标点云数据。
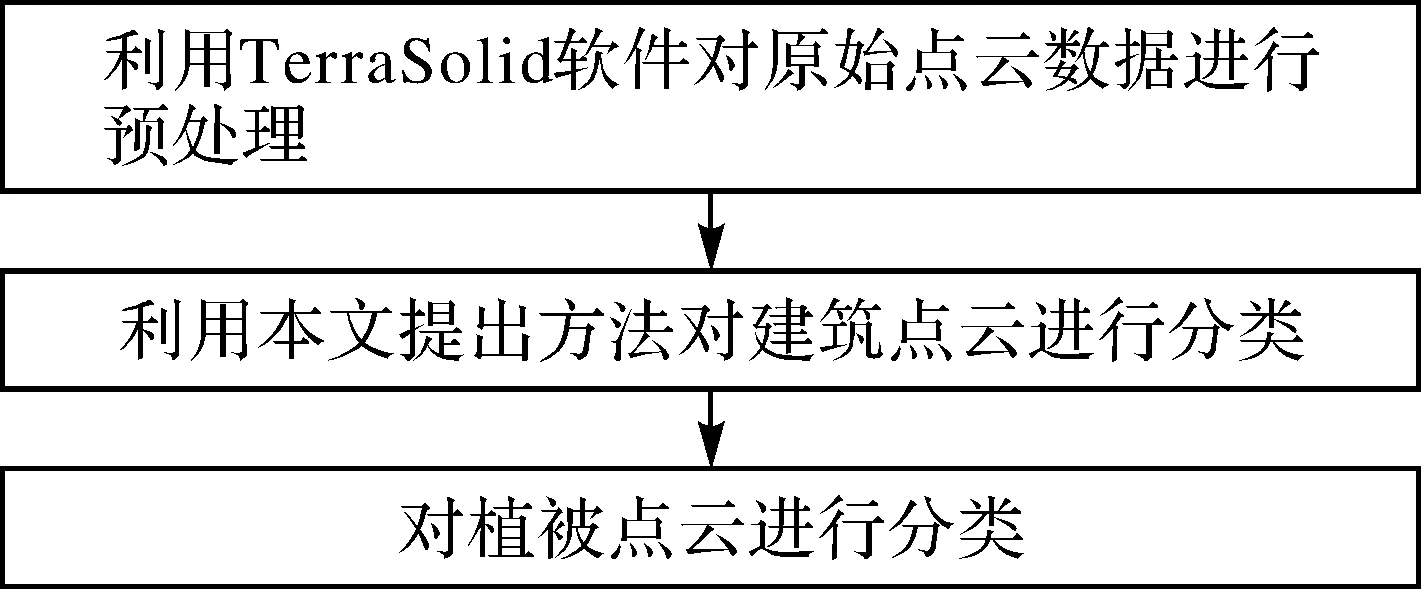
图1 数据处理流程
2.2 建筑物点云分类
首先,根据地面点云数据求得目标点云数据的相对高程信息。将目标点云进行编码并建立点云搜索空间,通过高度差值二次导数的分类模型将点云分为规则点云和不规则点云,进而对不规则点云进行分离,进一步分离为可能的屋顶点云、可能满足高斯偏差估计的点云、其他杂乱点云(主要是植被点云)。然后,给可能的屋顶点云和可能满足高斯偏差估计的点云一个阈值,利用阈值将上述点云中属于建筑物的点云分离出来。最后,将离散点中符合高差二次导数条件的点提取出来,并且利用离散点阈值条件筛选目标点。通过所有筛选出的点建立DSM,并进行光滑得到建筑点云。
2.3 植被点云分类
将建筑点云和地面点云分离后,剩余点云以植物点云为主体。由于激光可以穿透高大植物树冠,造成树冠点云内部分布散乱。利用与离散点识别相似的手段,在点云搜索空间中搜索各方向上高差二阶导数值散乱的点。将这些点云定义为树木或灌木和草丛。将剩余点云与DEM对比,高于地面且有相应二阶导数值的部分为地面植被点云。由于高度的差异,将低于2 m的植物定义为低矮灌木、草丛,反之,将高于2 m的植物定义为高大树木。
通过上述方法分类效果如图2所示。
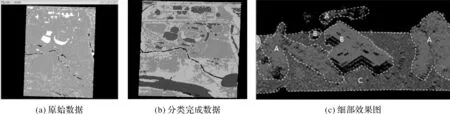
图2 分类效果
图2中的A区域为高大树木点云,B区域为建筑点云,C区域为地面点云和低矮灌木、草丛点云,其中灌木、草丛点云颜色较深。
部分研究区域的试验结果见表1。

表1 部分研究区域试验结果
从点云分类效果可以看出,建筑点云提取完整性好,正确性高,能够合理地反映出建筑的结构,基本没有缺失、多余的部分,保证了建筑的完整。尤其是在小型建筑点云分类方面,该算法的分类效果尤其突出,可以将小型建筑从周围的点云中分类出来。对于植被点云分类,能够保证树冠等细节的完整。
通过试验发现,本文提出的LiDAR点云数据分类效果理想,能够正确将建筑物、高大植被、低矮灌木及地面点云分类。通过该算法分类出的建筑、植被点云界限清晰、分类合理,证明该方法可行性高、有效性强。由于该算法需要的人为干预少,计算机可以自主完成分类工作,因此克服了点云数据分类中遇到的分类自动化程度低、分类效果差等难题,大大缩减了LiDAR后处理过程中的时间和人力成本。
3 结 语
本文根据机载LiDAR点云数据的数据特性,提出了一种基于高度差值的二次导数的人造建筑物、植被的点云分类方法。首先使用TerraSolid进行点云分类预处理,然后对预处理结果使用基于高度差的二次导数的分类方法进行完整的点云分类最后利用该方法对一个比较复杂的场景点云数据进行试验,精确地分离出了建筑物、植被等目标点云。试验结果表明,该方法分类效果好、分类速度快,分类的建筑物、植被点云效果理想。尤其在细节部分,分类建筑物细节分类清晰。由于该方法搜索尺寸大,对于人造小型设施识别度不高,因此,如何改变搜索范围并精细分类地面设施将是下一步研究的内容。
参考文献:
[1] 杨必胜,梁福逊,黄荣刚.三维激光扫描点云数据处理研究进展、挑战与趋势[J].测绘学报,2017,46(10):1509-1516.
[2] 张蕊,李广云,李明磊,等.利用PCA-BP算法进行激光点云分类方法研究[J].测绘通报,2014(7):23-26.
[3] 张利明.机载激光雷达点云数据分类方法研究[D].成都:西南交通大学,2013.
[4] 唐菲菲,刘经南,张小红,等.基于机载LiDAR数据获取森林地区DTM新方法[J].武汉大学学报(信息科学版),2009,34(4):459-462.
[5] 刘峰,龚健雅.基于3D LiDAR数据的城区植被识别研究[J].地理与地理信息科学,2009(6):5-8.
[6] 刘婷,苏伟,王成,等.基于机载LiDAR数据的玉米叶面积指数反演[J].中国农业大学学报,2016,21(3):104-111.
[7] 童礼华,程亮,李满春,等.地面LiDAR数据中建筑轮廓和角点提取[J].中国图象图形学报,2013,18(7):876-883.
[8] 王刃,徐青,朱新慧.用多种策略从机载Lidar数据中提取建筑脚点[J].武汉大学学报(信息科学版),2008,33(7):688-691.
[9] 李亮,王成,李世华,等.基于机载LiDAR数据的建筑屋顶点云提取方法[J].中国科学院大学学报,2016,33(4):537-541.
[10] 陈性义,黄迟,倪标.融合LiDAR数据与航空影像的面向对象水体提取[J].测绘科学,2017,42(3):114-119.
[11] 王宗跃,马洪超,徐宏根,等.基于LiDAR点云数据的水体轮廓线提取方法研究[J].武汉大学学报(信息科学版),2010,35(4):432-435.
[12] 彭检贵,马洪超,高广,等.利用机载LiDAR点云数据提取城区道路[J].测绘通报,2012(9):16-19.
[13] 陈云,丁思磊,王铁军.基于TerraSolid软件的Lidar数据处理初探[J].测绘与空间地理信息,2009(4):40-42.
[14] 李莲芳,邵秋铭.基于Terrasolid软件的激光雷达点云数据处理[J].城市勘测,2013(5):67-70.
[15] 刘沛,李英成,薛艳丽,等.基于TerraSolid与Inpho的LiDAR数据处理方法分析与研究[J].遥感信息,2010(1):17-21.
[16] 羌云娟,吴侃,秦臻.基于三维TIN的非地面点云剔除方法研究[J].测绘工程,2011,20(2):43-45.