深空微波测距测速现状及发展建议
2018-07-02徐茂格施为华
徐茂格,施为华
(中国西南电子技术研究所,成都 610036)
0 引 言
深空探测器通常距离地球有数亿,甚至数10亿km距离。以火星为例,火星与地球的星际距离在5 000万~5亿km之间变化,因此无法使用类似全球定位系统这样的地球轨道卫星导航。遥远的距离带来的问题同时包括微弱的接收信号,恶化了测距测速精度;以及深空探测器相对于单个地面深空站测量的几何关系变化非常微小,也就是观测几何差,不利于高精度的轨道测量。
为了获得高精度的轨道测量信息,国际上纷纷在无线电测量领域开展了一系列研究,包括将工作频率提高到Ka频段、超窄带锁相环、三相测速和测距、星上伪码再生测距等[1-2],以及开发了双差分单向测距(Delta Differential One way Ranging,△DOR)来提供探测器精确的角位置。
以探月工程为牵引,兼顾火星、小行星等深空探测任务的需求,我国建立了深空测控网,在20 dBHz条件下,X频段测速随机误差为0.1 mm/s,测距随机误差为1 m,极大地提升了我国远距离测控通信能力。根据我国深空探测后续任务规划,在载人登月、火星和小行星等深空探测任务中,探测器一般需要多次远距离变轨才能到达目的地,变轨精度要求很高;此外深空探测的科学任务,比如行星重力场研究等对轨道本身的测量精度要求也在提高。深空微波测量相关误差控制技术待完善攻关,以满足未来深空载人探测等任务对高精度测量技术的需求。
本文首先研究了国外深空测控无线电测量最新研究进展,归纳总结了国内深空微波测量现状,深入分析了测距、测速的主要误差源,在此基础上给出了深空微波测距测速发展建议。
1 国外深空测控无线电测量研究进展
目前国外深空高精度测量的直接任务需求是欧空局水星探测任务——BepiColombo,计划2022年到达水星,该任务将对水星进行全面观测,寻找水星上的撞击坑,研究水星的起源和内部物质构成,探测水星的稀薄大气和水星磁场,并且验证爱因斯坦提出的广义相对论。这个探测任务对测量精度提出了较高的要求,为此,2010年欧空局制定了提高无线电测量精度的路线图,具体来说就是将多谱勒测量精度提升到X频段0.01 mm/s(60 s积分时间),双向测距精度提高到20 cm,△DOR测量精度提升到1 nard,如表 1所示。
该项研究由罗马第一大学、ALMA空间公司、BAE系统公司以及意大利泰雷斯阿莱尼亚宇航公司组成的项目组开展具体工作[3]。拟采取的措施主要有:
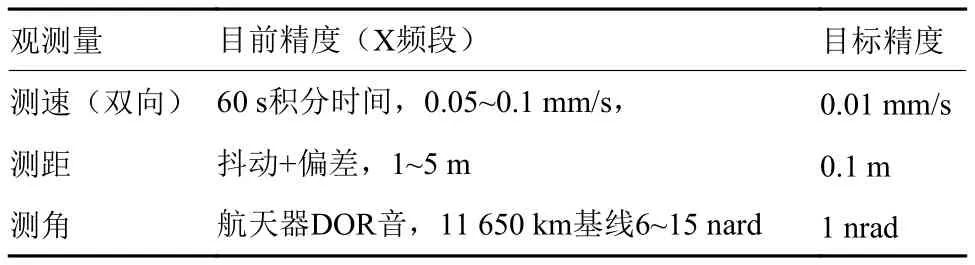
表1 ESA 深空测控精度提升目标Table 1 ESA deep space measurement accuracy improvement goal
1)采用X、Ka双频测量,差分抵消等离子体等的影响。
2)星上采用国际空间数据系统咨询委员会(Consultative Committee for Space Data System,CCSDS)的再生伪码测距;再生伪码测距提高了测距信号的功率利用率,有望将白噪声带来的测距随机误差降低到10 cm以内。
3)在线实时校正,地面站测距系统误差校准精度在15 cm以内。
NASA也计划通过采用多频链路、将测距音提高到4 MHz以及地面零值实时校正等措施将X频段的测距精度提高一个数量级[3],如图 1所示。
图1中的现在系统指的是目前深空站上/下行工作频段X频段,测距音频率1 MHz,站零值校正方式为跟踪前或后零值校正;试验目标指的是基于现有深空站和应答机能力,地面零值采用实时校正方式;未来改进指的是频率提升到Ka频段,测距音提升到4 MHz,地面零值实时校正。
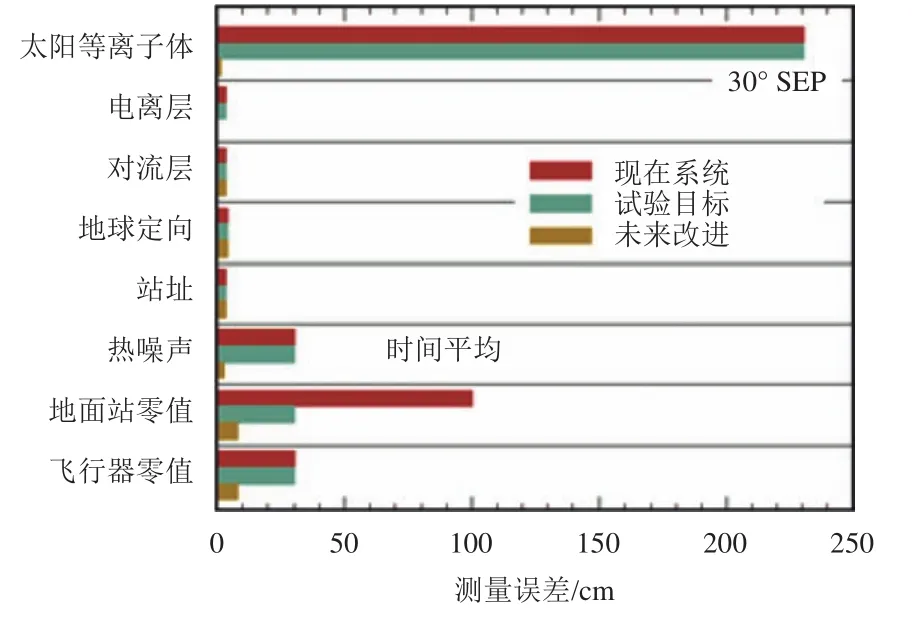
图1 NASA深空测距精度提升目标Fig.1 NASA deep space ranging accuracy improvement goal
此外,在其他涉及高精度测量的领域,比如高精度双向时间比对,在多频测量和提高测距伪码频率的基础上,正在进一步研究利用载波相位测量实现皮秒量级测量精度,如图2所示的ESA EGE(Einstein Gravity Explorer)项目。
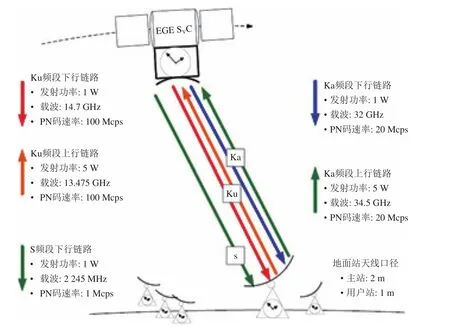
图2 ESA EGE项目高精度频率传递链路Fig.2 ESA EGE high accuracy time and frequency link
该任务将冷原子钟组搭载于倾斜轨道卫星上,利用微波链路来实现卫星和地面之间的时间频率传递,其中微波链路利用载波相位测量实现时间频率比对精度皮秒量级[4-5],主要由德国Timetech公司开展,目前已开展了两代设备的研制,最新研制的原理样机实现测量精度达到码测距1 cm(30 ps),载波测距0.1 mm(0.3 ps)[6]。
2 我国深空测控无线电测量现状
目前地球轨道航天测控任务多由我国随着载人航天工程建立起来的S频段航天测控网支持。S频段测控网具有精密跟踪、测距、测速、对飞行器遥控、遥测、双向话音及下行图像传输的功能,和国外同类网相比,具有测量元素多、精度高、实用性强等特点。探月工程启动后,我国建立了深空测控网,在布局上由分布在我国东部、西部以及南美洲的3个深空站提供全球90%以上的测控覆盖,主用的频段是X频段。提高工作频率可以有效地提高深空测控测量精度和远距离通信性能。在“嫦娥2号”工程中对X频段测控技术进行了研究和试验验证,结果表明[7]:
1)在测速方面,随着工作频率的提高,测速随机误差减小。在下行链路同等接收信噪比情况下,X 频段测速精度由S频段的厘米量级提高到了毫米量级。
2)在测距方面,我国S频段测距最高的主音频率是100 kHz,在指标预算中测距随机误差一般为10 m;在此次X频段测控试验中,采用了500 kHz测距主音,测距精度小于1 m。
2.1 测距误差源分析
由于收/发信号的时延很大,接收到的信号十分微弱,这就使深空测距具有下述特点:长时延的距离捕获、超远距离的解模糊、低C/N0测距信号的捕获和跟踪。因此在距离测量体制方面,为兼顾我国目前测距体制,同时满足深空探测多种测距体制和国际合作的需要,采用了侧音测距、音码混合测距和伪码测距3种测距体制[8-9]。
测量距离是通过测量收发信号时延来实现的,原始时延测量值ρ可表示为

其中:表示地面站/星上设备零值;表示对流层的附加延迟;R表示视线几何时延;表示等离子体的附加延迟;分别表示上下行工作频率;分别表示上下行电子含量;n表示热噪声等引入的随机波动。
从式(1)可以看出,星地双向闭环测距误差可以从以下3个方面开展分析。
1)空间附加延迟
空间传输附加延迟包括地球轨道电离层、对流层、行星等离子体以及日冕等。目前深空测控采用的是单频测量,大气传输延迟的修正是通过大气测量设备结合延迟模型进行估计,也就是修正采用的是外校正方式。
对流层传播延迟可以表示为

其中:表示“干”分量;表示“湿”分量;P 表示气压;T表示温度;表示水蒸气气压;M 和N是常数。
“干”分量引起的传播路径的延迟较大在米量级,但比较容易处理,只要简单地测出干大气压即可。“湿”分量引入的路径延迟在数10 cm量级,但变化较大,需要水蒸气微波辐射计进行精确标定。结合微波水汽辐射计精确测量与大气修正模型,可以将对流层延迟修正误差控制在1 cm以内。
在深空测控通信中,行星等离子体引入的路径延迟需要重点考虑,其典型特点是取决于平均电子密度(随距角而变化),SEP(Sun-Earth-Probe)角越小,行星间等离子体引入的路径延迟越大,极端情况可能高达数米。传统的地球轨道卫星定位系统比如GPS,采用的是单向测距,在大气传输波动修正中只需要修正单向波动,而在测控通信系统中采用了双向测量,且考虑到收发隔离,上下行频点相距较远,因此在传输延迟波动修正宏中需要同时考虑上行和下行延迟[10]。
2)设备距离零值
设备距离零值包含应答机零值和地面设备零值。应答机的距离两种一般是上天前通过仪器精密标定,并折算到应答机的天线相位中心位置。地面测距的参考点选在天线方位轴和俯仰轴的交点并通过精密测控得到其坐标,地面设备的零值通过在系统工作前的距离校零得到。可以看出,目前的设备零值是在某一典型状态参数(比如电平、温度、多谱勒)下的标校得到,而应答机和地面测控设备通常包含了大量的有源电路以及模拟器件,其电路的非线性和群时延特性,易受环境温度变化以及老化等带来测距零值变化。传统地面测控通信的系统设计中,由于工作状态的变化带来的距离零值变化可以通过距离校零(每次任务前或者任务后)来修正[4]。在目前深空测控通信工程指标分配中,校零残差预估为3 m。
3)热噪声等引入的随机波动n
纯侧音、音码混合测距随机误差主要由主音环的相位抖动决定,伪码测距随机误差主要由码环相位抖动决定。以主音环的相位抖动为例,地面热噪声对主音环相位抖动影响引入的误差为
由式(3)可以看出,测距随机误差主要取决于接收信噪比,环路带宽以及测音主音频率。测距主音频率越高,热噪声引起的测距随机误差越小。我国“嫦娥任务”中, 综合考虑测距转发带宽和噪声的影响,X频段测控采用了500 kHz 测距主音。在主音环相位抖动影响引入的误差约为0.3 m。ESA地面深空站的音码混合测距系统的主音频率最高可达1.5 MHz。
2.2 测速误差源分析
测控通信系统通过测量无线电链路多谱勒频率来测速。由于深空探测器距离地球很远,致收/发时延很大(例如,火星与地球间的收/发时延约45 min),而且接收到的信号已十分微弱。为了减小测速随机误差,深空测控通信中测速采用长时间积分(目前最长可到60 s)。在双向测速模式下,发射机和接收机使用同一个频率源,而且深空站一般使用氢脉泽这样的高稳定频标,在电报往返传输的时间间隔以及60 s积分时间内,氢脉泽的稳定度在10–15量级,故它的影响相对于系统中的其他误差可以忽略。
测速误差分析重点考虑行星等离子体及热噪声,原始多谱勒测量量可由式(4)表示。

其中:K表示转发比。
1)行星间等离子体
在太阳–地球–探测器夹角较小时,载波信号穿过日冕时会有相位闪烁,从而带来测速误差,这个影响的程度在很大范围内是变化的,它取决于太阳的活动情况,经分析S频段可能达到近10 mm/s,这是导致多谱勒测速误差加大的一个重要原因。
2)热噪声n
载波环信噪比直接影响测距随机误差,与积分时间成反比。采用极窄带锁相环可以提高测速精度,但同时需要考虑环路的动态跟踪能力。

其中:T表示的是测量积分时间,单位为s;c表示的是空中的光速,单位为mm/s;表示的是下行链路载波频率,单位为Hz;BL表示的是下行链路载波环单边带宽,单位为Hz;G表示的是应答机转发比;表示的是下行链路载波环路信号噪声比,单位为dBHz;表示的是上行链路载波功率与噪声频谱密度比率,单位为dBHz,应答机接收端载噪比为
经估算,X频段,积分时间T=60 s,

则热噪声引入的测速误差约0.05 mm/s。
3 后续发展建议及初步分析
从以上测距误差分析可以看出,相对于目前米级的测距精度,后续可以从以下3个方面开展工作:
1)减少空间传输波动,频段提高到Ka频段,进一步多频同时测量可以解算大气传输波动。
2)控制设备零值的变化,开展地面以及星上设备零值实时监测技术研究。
3)减少测距随机误差,采用星上宽带伪码再生测距或者更高频率的测距主音。
测速精度的提升瓶颈在于行星等离子体带来的测速误差恶化。工作频率的提高是一个有效途径,但是在日冕极大增强时(SEP小于15°)效果并不理想,采用X与Ka频段双频观测是有效的解决途径[11-12]。
综上所述,多频同时测量可以同时有效地提高测距和测速精度,是深空微波高精度测量体制设计中的重要内容。此外与测速不同,测距需要标校设备的绝对距离零值以及监测其变化情况。
3.1 多频链路设计
工作频率的提高,可以减轻等离子体的影响。相对于X频段,系统工作在Ka频时可以将等离子效应降低约1/18。但这种方法在日冕时(SEP小于15°)效果并不理想。
目前传统的测控系统采用的是单频测量,电离层附加误差修正采用的外校正的方式。相对于外校正,基于多频链路的系统内校正测量精度更高。由于测控系统采用的是双向测量,以双向测距为例,双向距离ρ方程为
式(7)中只有一个已知量ρ,存在3个未知量R、Iu与Id。为了求解出准确的R,需要消除上下行电离层的影响,需要3条双向测距链路。
结合后续深空频率规划,建议采用X/X、X/Ka、Ka/Ka频段的多频链路。X/X、X/Ka、Ka/Ka频段的多频链路的双向测距观测方程为
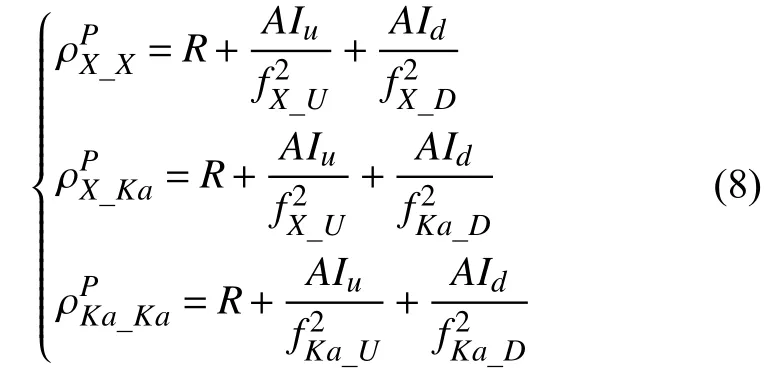
研究表明即使在大SEP角情况下,多频系统也基本能将等离子体影响消除,可以提供的测量精度即便是在探测器接近合日位置时也能达到10–2mm/s,提供能将等离子噪声完美界定出来的数据集。
多频系统的采用使得无线电观测量不受距角的影响,但是带来系统复杂度的增加,目前深空站的均是单频工作以及单品测量。为了支持多频同时测量,地面设备需支持多频同时发射以及接收,同时也包括航天器应答机需支持多频同时发射与接收。从航天方面看,因为电磁兼容性问题,设计一个单独的集成单元来支持X/X、X/Ka及Ka/Ka三个链路的同时传输同样充满挑战。图 3为深空探测器多频应答机的典型配置。
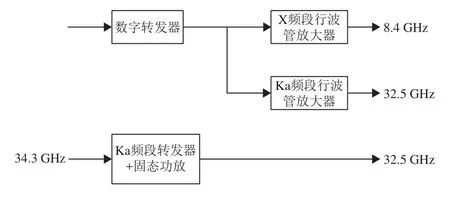
图3 深空探测器多频应答机配置Fig.3 Deep space explorer multi-link transponder configure
3.2 设备零值在线高精度监测
在传统地面测控系统中的距离校零一般采取任务前或任务后的标校,星上设备的零值在上天前通过地检设备测量得到。测距精度近一步提高在很大程度上受限于校零的准确性以及零值变化的实时监测。本文设计了一种设备零值实时监测环路如图 4所示,星上应答机也可采用类似校零环路。校零环路设计的一种重要考虑因素是零值监测信号的传输路径尽可能与工作信号一致,因此。图 4给出的校零环路设计中,在功放输出耦合部分上行信号混频道下行接收信号频段再通过场放前的耦合口耦合到下行接收链路中,形成闭环监测环路。
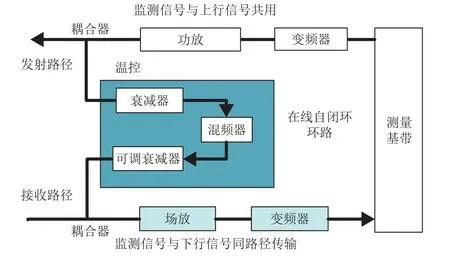
图4 地面站零值实时监测Fig.4 Ground station delay bias online monitor
图4中下行链路中同时存在航天器下发的下行链路信号和从功放耦合口环回的上行信号,因此实时监测环路的系统设计中,还需要重点考虑以下2方面问题。
1)环回信号与应答下行信号间的互干扰抑制问题。在多频链路系统设计中,下行链路不仅包含了航天器下行X频段信号、航天器下行Ka1频段信号、航天器下行Ka2信号,同时还有自校正X频段信号、自校正Ka1信号、自校正Ka2信号。对于不同的测量体制,多路信号的互干扰可以采取不同的措施,伪码测距可以通过设计上行伪码和下行伪码的正交方式来减少多址干扰,或者引入再生干扰抵消技术,侧音测距中可以通过修改实时校零本振的方式来避免环回信号和应答下行信号频谱重叠。
2)实时监测单环路附加环节的高稳定性设计。实时校正单元用于上下行链路硬件时延的实时校准,对时延稳定性要求最高。且自身的时延需要通过仪器定期标定,并采用恒温设计,确保自身的硬件时延长期稳定性。
在前期关键技术攻关过程中,搭建了地面实时校零环路测试平台,测试了干扰抑制技术和零值实时监测的实际效果,如图5所示。从图5中可以明显看出干扰对消后,信号的主瓣已基本消失,频域幅度降低最大超过10 dB。
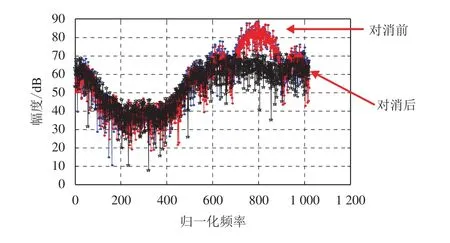
图5 干扰对消效果示意图Fig.5 Mutual interference reduction technology testing
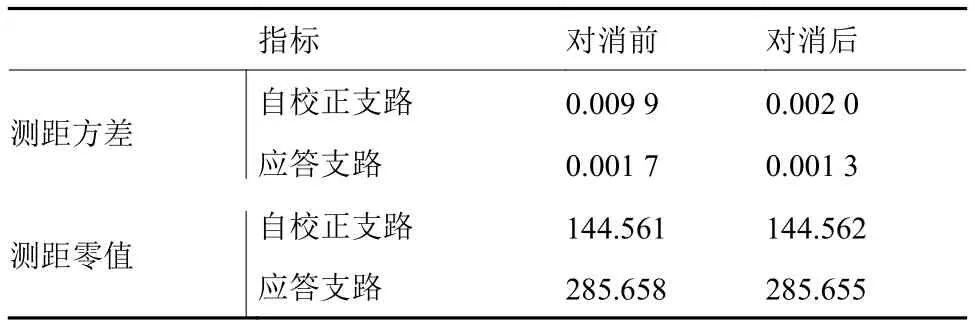
表2 干扰对消前后测距误差Table 2 Ranging error before and after mutual interference reduction m
4 结束语
深空无线电测量精度进一步提高的瓶颈主要在于空间链路传输波动。多频同时测量可以使得无线电观测量基本上不受太阳–地球–探测器角度的影响。此外,绝对距离的测量还需要重点关注系统的校零残差,对零值标定精度提出了较高的要求,同时需要引入在线校正环路实时监测设备零值的变化。
[1]BOSCAGLI G,HOLSTERS P,VASSALLO E,et al.PN regenerative ranging and its compatibility with telecommand and telemetry signals[J].Proceeding of IEEE,2007,95(11):2224-2234.
[2]董光亮.深空测控新技术研究进展[J].深空探测学报,2014,1(4):243-250.DONG G L.Development of new technology in deep space TT&C[J].Journal of Deep Space Exploration,2014,1(4):243-250.
[3]IESS L,BUDNIK F,COLAMARINO C,et al.Improving tracking systems for deep space navigation[C]// 6th ESA International Workshop on Tracking,Telemetry and Command Systems for Space Applications.Darmstadt:EAS,2013:509-513.
[4]EIDEL A,HESS M P,KEHRER J,et al.The ACES microwave link:instrument design and test results[C]//Proceedings of 2007 Joint Conference of the IEEE International Frequency Control Symposium and the 21st European Frequency and Time Forum(IFCS-EFTF2007).Geneva,Switzerland:IEEE,2007:1295-1298.
[5]AUGELLI M.ACES operations:an ISS external scientific payload looking for experimental confirmation sonth egeneral relativity theory[C]//Proceedings of 14th International Conference on Space Operations.Daejeon,Korea:AIAA,2016:1-5.
[6]张旭.空间站高精度时频微波链路系统体制设计及关键技术[J].电讯技术,2017,57(4):407-411.ZHANG X.System design and key technologies of high accuracy time and frequency microwave link for space station[J].Telecommunication Engineering,2017,57(4):407-411.
[7]吴伟仁,李海涛,董光亮,等.嫦娥二号工程X 频段测控技术[J].中国科学:技术科学,2013,43(1):20-27.WU W R,LI H T,DONG G L,et al.X-band TT&C technology for the project of CE-2[J].Science China Technological Sciences,2013,43(1):20-27.
[8]曹建峰,李培佳,谢剑锋,等.CE-2小行星探测试验轨道快速重建研究[J].飞行器测控学报,2013,32(3):251-256.CAO J F,LI P J,XIE J F,et al.Fast orbit reconstruction for asteroid exploration experiment of CE-2[J].Journal of Spacecraft TT&C Technology,2013,32(3):251-256.
[9]唐歌实.嫦娥探测器轨道测定中的科学与技术问题[J].飞行器测控学报.2013,1(4):243-250.TANG G S.Science and technology problems in tracking and orbit determination for Chang’e probes[J].Journal of Spacecraft TT&C Technology,2013,32(3):189-195.
[10]BORDER S,MEEGYEONG P.Station delay calibration for ranging measurements[J].Proceeding of IEEE,2007,95(11):2224-2234.
[11]MARIOTTI G,TORTORA P.Experimental validation of a dual uplink multifrequency dispersive noisecalibration scheme for deep Space tracking[J].Radio Science,2013(48):111-117.
[12]ZANNONI M,TORTORA P.Numerical error in interplanetary orbit determination software[J].Journal of Guidance,Control,and Dynamics,2013,36(4):1008-1018.