基于无穷单应阵的动态天基弱小目标检测
2018-07-02刘乙君
张 琦,许 东,刘乙君
(北京航空航天大学仪器科学与光电工程学院,北京 100191)
1 引 言
天基红外系统在对重要空间目标(包括卫星、飞行器、导弹)捕获、定位和跟踪中得到广泛应用[1],而弱小目标检测方法是其中关键技术之一。在天基红外系统中,由于目标成像距离远和搭载相机的卫星的运动,目标成像为点目标且图像信噪比低。此时图像主要由三部分组成[2]:低频部分的地球或背景、高频部分恒星背景及弱小运动目标(但因为卫星的运动,目标相对于背景的运动被隐藏)、随机噪声。
常见的弱小目标跟踪前检测方法有Top-hat[3]、TDLMS[4]、空域及频域滤波[5]、帧差法[6]、局部对比度[7]等。其中Top-hat算子依赖于结构元素的选取和构造方法,检测效果不稳定。TDLMS方法虽然鲁棒性较强,但运算量大、实时性差。空域和频域滤波对抑制低频背景很有效,但恒星背景与目标均为高频,很难做到有效去除,而帧差只适用于静止或者缓慢运动的背景。对于这一问题,国内外学者们也进行了大量研究和尝试。王东[8]等提出一种多滤波融合的小目标检测方法,相比经典Top-hat等方法准确率有了提高,但不适用于有大量恒星点的星空背景图像。吴涛[9]等提出一种基于局部特征的单帧红外小目标检测算法,在频率上滤除低频背景,并利用能量与灰度阈值完成分割,采用拉普拉斯算子完成小目标轮廓的检测弱小目标。但该方法并不适用于只占一两个像素的小目标。Wang[10]等提出一种基于灰度分布和核函数的检测方法,分析目标灰度分布并联合核函数提高了检测精度,但只利用了灰度信息,导致虚警率略高。
天基红外系统获取的图像中,目标点小且相对于背景的运动由于成像卫星的运动被隐藏。另一方面,卫星运动造成背景恒星同时运动,已有方法并没有很好地解决这个问题。针对此现状,本文提出一种基于无穷单应阵的恒星背景补偿方法,在消除运动恒星背景的同时能恢复目标相对于背景的真实运动,有利于后续目标检测。地球背景则采用改进的中值滤波方法进行抑制,最后利用三维时空域方向滤波消除随机噪声并结合卡尔曼滤波实现对目标的检测和稳定跟踪。整体流程图见图1。
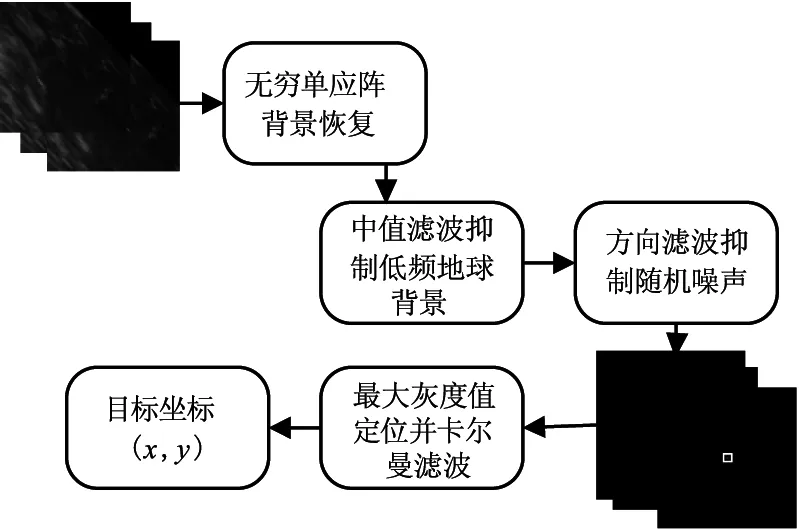
图1 本文提出算法流程图
2 基于无穷单应矩阵的恒星背景补偿
首先分析卫星机在惯性坐标系下的姿态和位置变化,结合成像模型,计算序列图像与采样初始时刻图像之间的单应矩阵,利用此单应阵对序列图像进行仿射变换来补偿恒星背景的运动。
2.1 天基卫星成像模型
一般相机的成像模型可写作:
x:PXw
(1)
式中,Xw为世界坐标系中的一点;x为该点的像在图像坐标系中的坐标;P为投影矩阵,一般可写作:
P=KR[I|-C]
(2)
式中,R为相机标系相对于世界坐标系下的旋转矩阵;C为相机坐标系原点在世界坐标系下的位置坐标;R和C构成了相机的外参数。K为相机内参矩阵:
(3)
式中,(px,py)为相机主点在像素平面坐标系上的坐标;τ为相机纵横坐标比例系数;s为畸变系数。
为了描述天基卫星所搭载的成像相机的位置和姿态,引入地心惯性坐标系XwYwZw作为参考世界坐标系。坐标原点Ow为地心,Xw轴指向春分点,Zw轴与地球瞬时自转轴平行,Yw轴与Xw,Zw构成右手坐标系。
其中卫星相机的位置可以根据轨道六根数和当前图像采样时间来确定。轨道六根数包括:轨道长半径a,均角速度ω,近地点时间t,偏心率e,升交点赤经Ω,轨道平面倾角i,近升交距u[11],记为Xs。
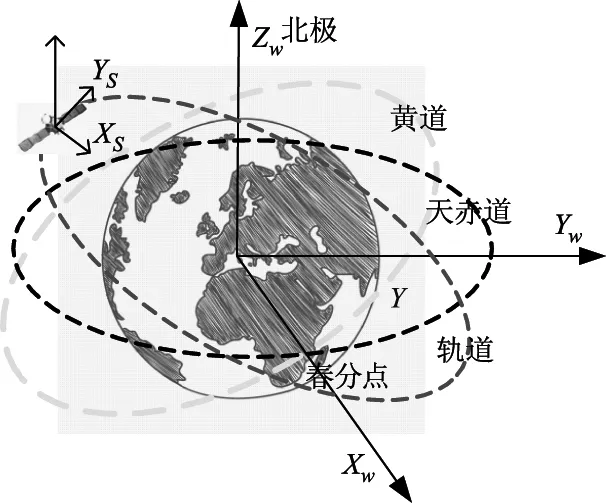
图2 卫星坐标系与赤道惯性坐标系
卫星某一时刻在惯性坐标系下的姿态可以用从地心惯性坐标系到卫星坐标系的旋转矩阵Rps描述,此矩阵可由星敏感器提供。为了简化问题,考虑相机坐标系与卫星坐标系完全重合。则参考世界坐标系到图像坐标系的相机投影矩阵可写作:
P=KRps[I|-Xs]
(4)
2.2 无穷单应矩阵
假设相机运动前后的P矩阵分别为P1=K[I|0]和P2=KR[I|-C],如图3所示。
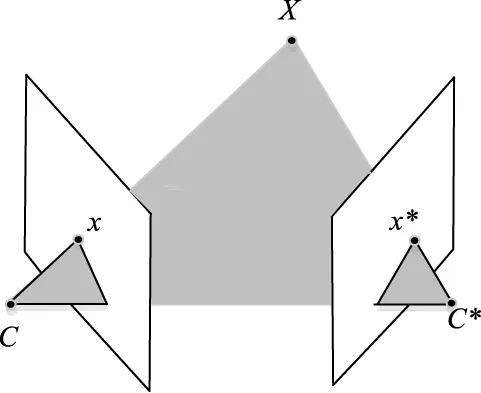
图3 相机运动前后空间点在像平面上投影
空间某一点(X,Y,Z),在两个像平面上成像点之间满足关系:
x′=KRK-1x+KT/Z
(5)
式中,x′和x分别为t时刻图像和(t+1)时刻图像上对应点坐标;R为两相机之间姿态旋转矩阵;T为两个时刻间相机位置平移矢量。
假设初始时刻和t时刻相机的姿态矩阵分别为Rps0和Rpst,如图4所示。参考惯性坐标系中某点Xw在两个时刻的相机下坐标分别为:
(6)
所以t时刻的相机相对于初始时刻相机姿态的旋转关系,即式(5)中R为:
R=RpstRps0-1
(7)
当成像目标点为无穷远点时,式(5)中第二项可以忽略不计,则相机运动前后两幅图像实际上存在一个单应关系:
Hπ=KRpstRps0-1K-1
(8)
将单应阵Hπ作用到t时刻图像上,即对图像进行仿射变换:
[x,y,1]T=Hπ×[x′,y′,1]T
(9)
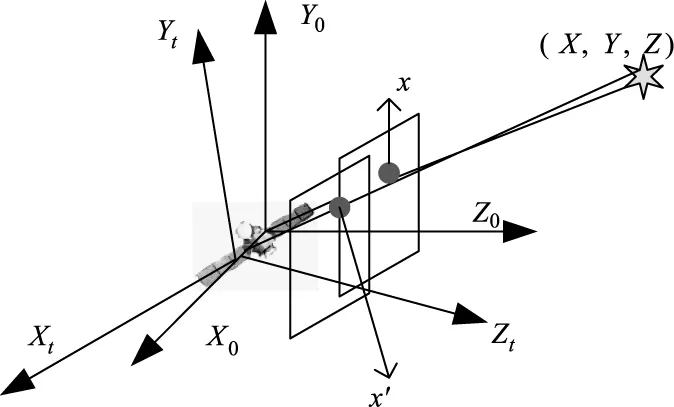
图4 在轨卫星对星空背景点成像模型
图5给出恒星背景补偿示意图(只考虑恒星背景以简化问题)。图5中第一幅图代表采样初始时刻卫星获取的图像,第二幅为t时刻图像,由于卫星运动,恒星背景向右偏移若干像素。利用Hπ对t时刻图像进行仿射变换得最后一幅图像,t时刻图像上每个恒星点x′被映射到点x,此时再与初始时刻图像作差,差分图上所有恒星点响应值近似为零,而目标相对于背景运动被恢复,响应值保持不变。
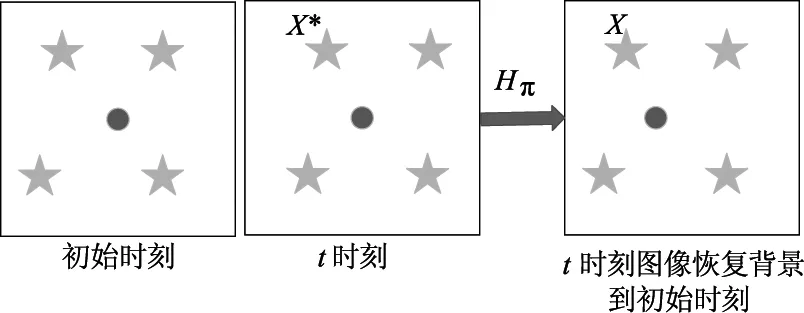
图5 恒星背景补偿方法示意图
3 地球背景和随机噪声抑制
3.1 中值滤波抑制低频地球背景
中值滤波方法是一种经典的图像非线性空域滤波方法,最大中值(均值)滤波方法是其一个改进算法。具体做法为:用一个固定大小窗口去遍历图像,取窗口内中位值(均值)作为该点的预测值,在处理边缘时,预测值为景象边缘的平均强度值。对于图像中缓慢变化的低频地球背景,预测值与该像素点的灰度值非常接近,而目标作为一个亮点会被滤除,因此进行差分运算后背景响应值小,目标响应值大,有利于突出目标,提高图像信噪比。
3.2 方向滤波滤除随机噪声
对于弱小目标,经过背景抑制和背景差运算后,图像中还剩下大量随机噪声,但目标相对于背景的连续运动被恢复。三维时空域方向滤波不仅可以消除随机分布的噪声点,还能对连续运动的目标信号能量进行积累,有利于弱小目标的检测。
方向滤波算法通过定义每个像素点在时域上的位移矢量,并利用每个像素点在八个方向的连续位移值来判断其是连续移动的目标点或者随机噪声[11]。图6为该算法流程图。
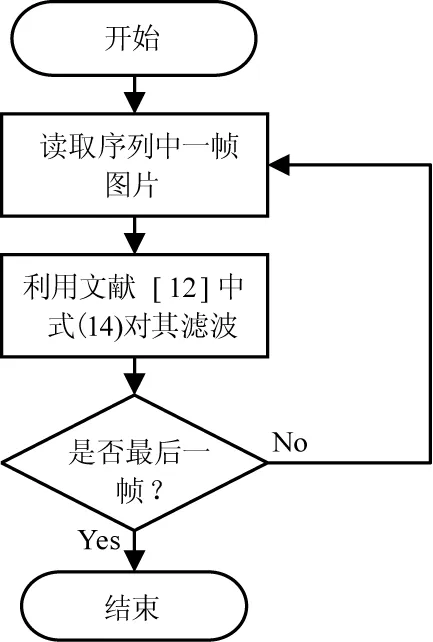
图6 方向滤波在实验图像上处理流程
4 基于卡尔曼滤波的目标轨迹预测
经过上述处理,恒星背景与地球背景以及大部分随机噪声已经被去除,但由于成像采样量化的影响,利用最大灰度值对目标进行定位的方法,难以获得目标的准确位置。Kalman滤波是一种对动态系统的状态序列进行线性最小方差估计的算法,通过状态方程和观测方程来描述一个动态系统并能实时给出观测系统状态量的最优估计值。
考虑目标的运动速度不会突变,在短时间内可以近似为匀加速直线运动。建立状态方程和量测方程:
(10)
(11)
式中, (xk,yk)是第k帧图像目标的坐标; (Δxk,Δyk),(Δvxk,Δvyk)分别是是第k帧图像目标运动的速度和加速度;Wk-1是系统方差阵;(Zxk,Zyk),(vxk,vyk)为k时刻目标位置和速度的观测值,同时转移矩阵为单位阵;Vk为观测误差阵。在每个图像采样时刻定位目标量测值,再结合卡尔曼滤波方程给出的观测值,得到当前目标坐标的最优估计值。
5 实验结果与分析
设定卫星的初始轨道高度约为36000km,轨道六根数分别为e=0.0004455,ω=0.5834,i=1.45×10-3,Ω=5.3027,a=42158.5 km,通过近地点的时刻为2000-01-01 00:05:00。目标初始高度为赤道平面内100 km,惯性系下初始坐标为[6471, 0, 0]T,亮度为七等星,运动轨迹为赤道平面沿着y轴方向,速度为5 km/s。背景恒星点由IRAS星表中的数据生成,图像的峰值信噪比PSNR为5.16 dB。连续采样20帧图像,图7(a)、7(b)、7(c)给出了第一帧和第十帧为代表的仿真原图像及相应的 背景差图。其中7(c)图中目标因帧差被消除;7(d)、7(e)、7(f)分别给出了消除背景后的处理结果,其中地球背景用改进中值滤波后与原图差分去除,随机噪声由方向滤波消除。由图7(c)和图7(f)的对比可知,利用本文方法进行恒星背景消除后,可以有效去除恒星背景的影响。图8(a)、8(b)、8(c) 是Top-hat法对应处理结果,图7(f)和8(c)对比可以看出,本文算法效果优于Top-hat法。另外,表1还给出了本文算法与Top-hat法,TDLMS法在背景抑制因子(BSF)和图像信噪比增益(SNRG)两个方面的对比,由表1知,本文算法在SNRG和BSF两方面相比传统算法占绝对优势。
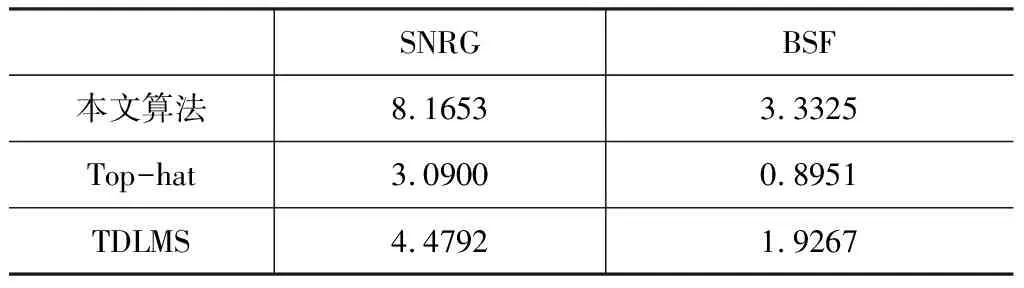
表1 本文方法与以往方法对比
在图7(f)上利用最大灰度值定位目标,结果如表2所示(给出10帧),可以看出,目标检测结果与实际坐标误差稳定在0.5个像素以内。
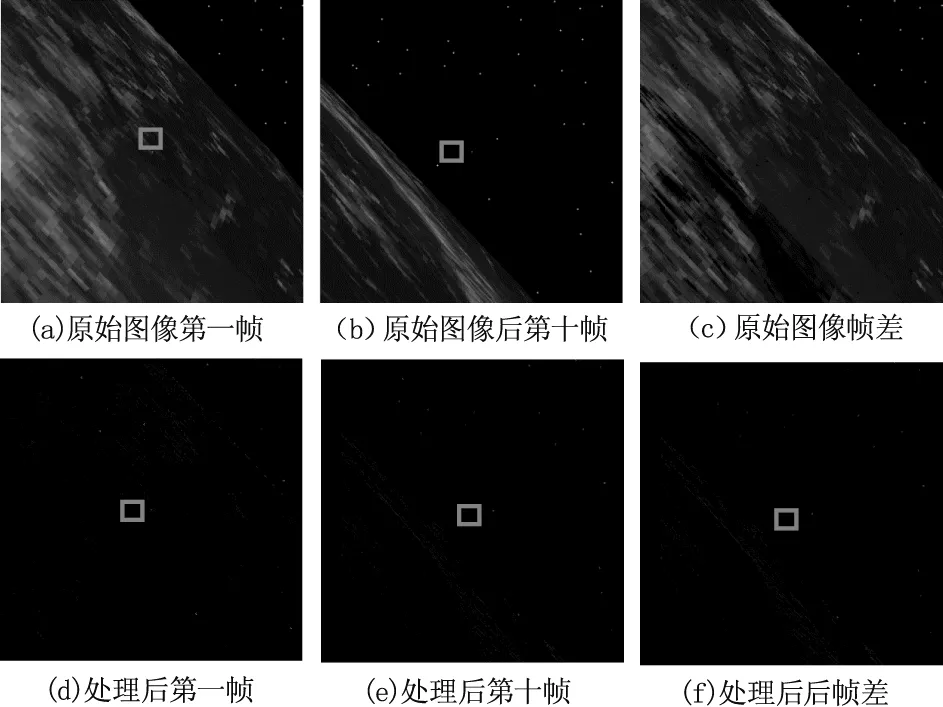
图7 背景运动未消除与消除对比图
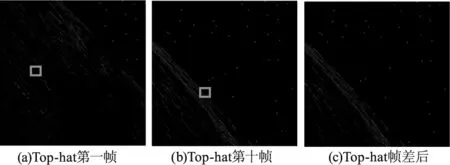
图8 Top-hat法,结构元素形状选取为矩形,大小为3×3
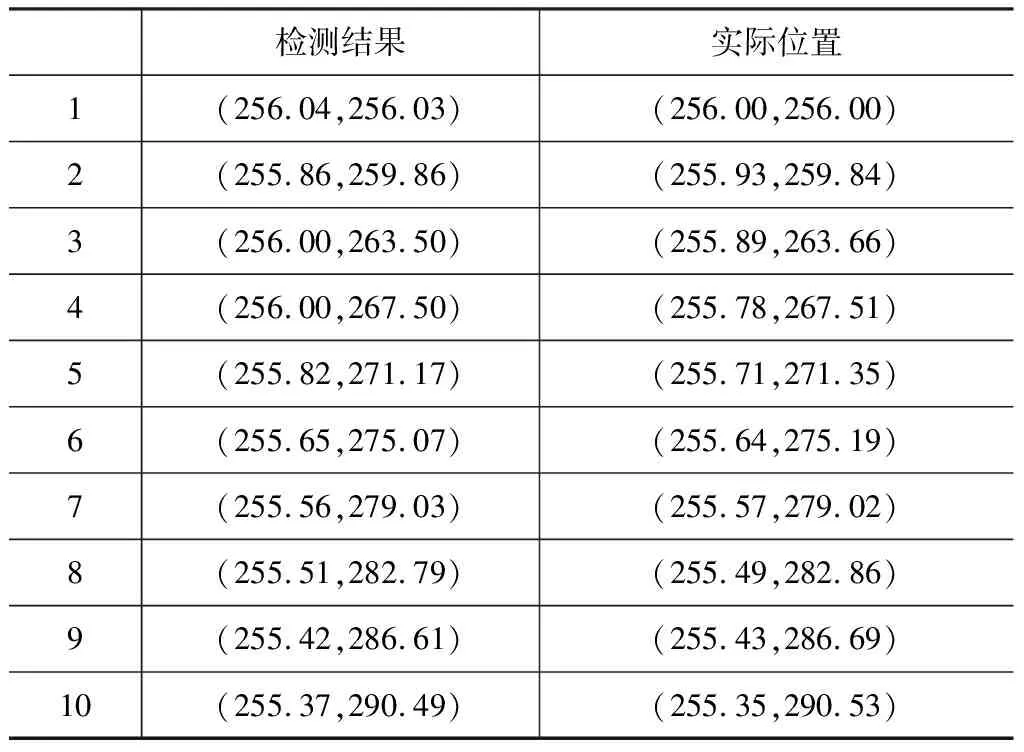
表2 提取目标坐标结果(单位:像素)
图9为卡尔曼预测目标轨迹与直接检测目标误差对比图,可以看出,建立匀加速运动模型再使用卡尔曼滤波能进一步提高定位精度,实现对目标的实时稳定跟踪。
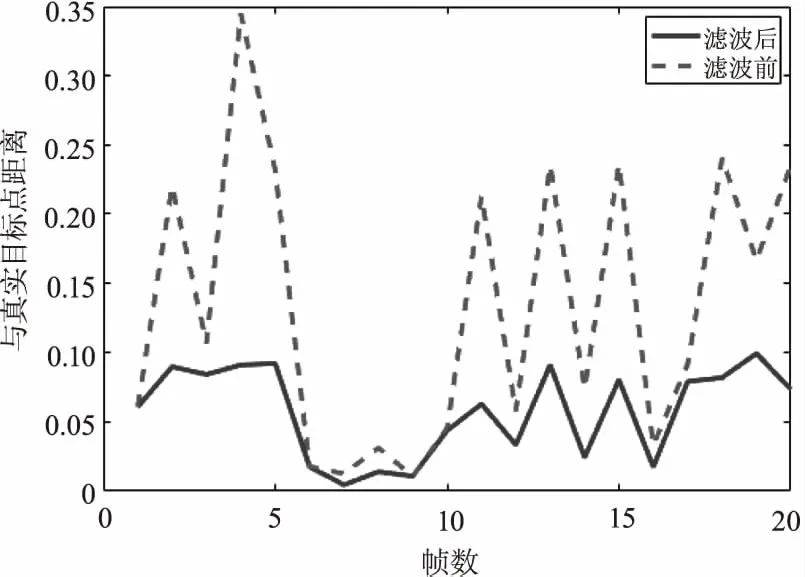
图9 卡尔曼迹滤波前后对比
6 结 论
基于卫星平台对空间弱小目标进行检测和跟踪时,会同时受到成像平台和恒星背景运动的影响。本文在对天基卫星运动情况下的恒星背景成像模型进行分析的基础上,利用相机运动信息得出图像之间的单应关系,进行恒星背景的运动消除,并采用中值滤波、方向滤波以及卡尔曼预测等抑制地球背景与随机噪声,实现对目标的有效检测与跟踪。这一方法对解决导弹预警、对空监视、空间目标探测等问题具有重要的意义。
参考文献:
[1] HANG Jiaojiao.Study on detection method of near space infrared target in space-based platform[D].Xi′an:Xidan University,2015:14-15.(in Chinese)
韩姣姣.天基平台临近空间红外目标探测方法研究[D].西安:西安电子科技大学,2015:14-15.
[2] HOU Wang,SUN Xiaoliang,SHANG Yang,et al.Present state and perspectives of small infrared targets detection technology[J].Infrared Technology,2015,37(1):1-10.(in Chinese)
侯旺,孙晓亮,尚洋,等.红外弱小目标检测技术研究现状与发展趋势[J].红外技术,2015,37(1):1-10.
[3] X Bai,F Zhou.Analysis of new top-hat transformation and the application for infrared dim small target detection[J].Pattern Recognition,2010,43:2145-2156.
[4] M M Hadhoud,D W Thomas.The two-dimensional adaptive LMS(TDLMS) algorithm[J].IEEE Transactions On Circuits And Systems,1988,35(5):485-494.
[5] R C Gonzalez,R E Woods.Digital image processing[M].Beijing:Publishing House of Electronics Industry,2010.(in Chinese)
R C 冈萨雷斯,R E伍德.数字图像处理[M].北京:电子工业出版社,2010.
[6] HE Yingfei.Moving target detection based on improved frame difference method and background subtraction method[D].Qinhuangdao:Yanshan University,2016:11-12.(in Chinese)
何银飞.基于改进的帧差法和背景差分法实现运动目标检测[D].秦皇岛:燕山大学,2016:11-12.
[7] WANG Gang,CHEN Yongguang,YANG Suochang,et al.Detection of infrared dim target based on image patch contrast[J].Optics and Precision Engineering,2015,23(5):1424-1433.(in Chinese)
王刚,陈永光,杨锁昌,等.采用图像块对比特性的红外弱小目标检测[J].光学 精密工程,2015,23(5):1424-1433.
[8] WANG Dong,WANG Min.De3tection of infrared small target based on fusion of multi-filters[J].Journal of Applied Optics,2017(1):106-113.(in Chinese)
王东,王敏.基于多滤波算法融合的红外小目标检测[J].应用光学,2017(1):106-113.
[9] WU Tao,HE Wenzhong,CHEN Xiaolu.Detection algorithm of single frame infrared small target based on local features[J].Laser & Infrared,2016,46(3):368-371.(in Chinese)
吴涛,何文忠,陈晓露.基于局部特征的单帧红外小目标检测算法[J].激光与红外,2016,46(3):368-371.
[10] Wang Luping,Zhang Luping,Zhao Ming.An algorithm for moving target detection in IR image based on grayscale distribution and kernel function[J].Journal of Central South University,2014,21(11):4270-4278.
[11] Shiomi K,et .al.GPS Satellite position calculate method and apparatus:JP2012047496[P].2012.
[12] PU Jingsong,XU Dong,LIU Yijun.Rapid detection of infrared dim targets under starry sky background[J].Laser & Infrared,2017,47(4):513-518.(in Chinese)
蒲静松,许东,刘乙君.星空背景下红外弱小目标的快速检测[J].激光与红外,2017,47(4):513-518.
