斜拉桥下塔柱大倾角位移的观测方法
2018-06-29周华欣
王 安,周华欣
(中交隧道局第二工程有限公司,陕西 西安 710100)
0 引 言
禹门口黄河公路大桥位于晋陕黄河大峡谷出口处,为1座主跨565 m的双塔双索面钢混结合梁斜拉桥。大桥主塔为“H”型索塔,塔高171.3 m,下塔柱高25.75 m,中塔柱高71 m,上塔柱高71.55 m。上中下塔柱由上横梁及下横梁连接,横梁施工完成后进行预应力张拉[1-3],以消除斜塔柱本身由于自重而产生的应力。由于主塔采用爬架法施工,下塔柱施工完成后无法及时进行下横梁施工,下塔柱此时为自然伸臂大倾角状态,受自身重力影响易产生位移。本文主要研究如何测量大倾角时下塔柱位移的变化情况。
1 工程概况
禹门口黄河公路大桥位于旧桥下游420 m处,跨径组成为245 m+565 m+245 m,桥面宽30.25 m。主塔11#墩位于黄河主河上方,基础采用钻孔灌注桩群桩基础方案,单桩直径为2.0 m,桩长65 m,承台尺寸为49 m×29 m(横桥向×顺桥向),桩基沿顺桥向布设6排[4],每排10根桩,共60根。西塔12#墩位于黄河漫滩之上,基础共设50根桩,桩长58 m,承台尺寸为49 m×24 m(横桥向×顺桥向),桩基沿顺桥向布设5排,每排10根桩。主塔由塔座、下塔柱、中塔柱、上塔柱、下横梁、上横梁组成,下塔柱为向外伸壁、变截面、圆倒角薄壁空心墩,中塔柱为向内伸壁、变截面、圆倒角薄壁空心墩,上塔柱为垂直等截面薄壁空心墩。上下横梁均为预应力箱型现浇梁。施工区域位于暖温带半干旱气候区,冬季寒冷偏短,夏季炎热较长,昼夜温差较大,年平均气温为14.2 ℃,最高温度为41 ℃,最低温度为-15 ℃,降雨偏少,年降水量为558 mm,由于地处黄河大峡谷出口处,全年不定期有大风。
2 仪器选定
考虑位移观测精度及现场环境对仪器精度影响的要求,选定带有ATR(自动照准功能)的测量仪器,仪器精度为1″ ,免棱镜测量距离为500 m。本项目使用仪器为徕卡TS16,定向棱镜为徕卡原装圆棱镜,棱镜常数为0,预埋棱镜选定L型徕卡迷你小棱镜,棱镜常数为17.5 mm[4-6]。其他物品有强光手电、对中杆、木质三脚架、防风棚架等。
3 监控点的布置
主塔11#、12#墩距离岸边最近距离分别为150 m和170 m,监控点布设时考虑后视距离应大于前视距离,以保证定位方位角时的仪器设站精度,长边控制短边以提高测量精度及数据的可靠性。考虑后期施工及人为因素的影响,选用4个监控点并沿河岸布置,保证4个监控点互相之间通视,控制点精度为GPS D级控制点和二等水准点[7-10]。由于仪器测量时受外界因素影响较多,本项目主要受风力的影响,所以在控制点位处放置直径为2 m、高度为2 m的钢护筒,并在需要的位置切割开口方便测量及后视。
4 平面控制网复测
平面复测控制网等级为GPS D级网布局,沿线路方向设点,使用西安坐标系下的平面坐标,其最弱边相对中误差应不大于1/35 000。D级GPS网的技术设计、观测、外业数据质量检核数据处理、点位精度等符合《全球定位系统(GPS)测量规范》(GB/T18314—2001)中的有关规定。在本标段共复测平面控制点17个,其中以5个(A02、A01、DQ03、DQ02、DQ01)设计院交桩控制点作为已知数据,计算另外12个(JM4-JM26)加密控制点。测量过程中采用边连接式组成GPS网,以保证网的几何强度,提高平面控制网的可靠性。首先将4台华测T8接收机分别架设在A02、A01、DQ02、JM09上,观测1个时段,然后保持A02、DQ02点上接收机不动,将其他2台接收机分别架设在JM10、JM04控制点上观测1个时段;然后保持DQ02、JM10点上接收机不动,将其他2台接受机分别架设在DQ01、JM11控制点上观测1个时段,由此循环最后分别把4台接收机架设在JM23、JM24、JM25、JM26上观测1个时段,每时段测量时间应大于2 h[11-13]。每台接收机在控制点上观测时的仪器高度、开关机时间、仪器编号、天气情况、操作人员等信息应按照规范要求进行记录,以备后期数据处理。
5 数据分析
本项目静态数据平差采用华测CGO静态处理软件进行处理及平差,评查结果应满足《全球定位系统(GPS)测量规范》(GB/T18314—2009)要求。
5.1 基线解算分析
基线解算采用广播星历,GPS网基线解算采用华测商业软件CGO进行,以双差固定解求解基线向量。外业观测结束后,以三角形为基本构网图形对观测基线进行处理和质量分析,检查基线质量是否符合相关规范的要求。
5.2 基线向量异步环闭合差
闭合环应符合下列各式。

5.3 首级控制网复测异步环闭合差统计
异步环闭合差W统计如表1所示。

表1 异步环闭合差W统计结果
复测异步环闭合差最大为环JM20-JM24-JM23,闭合差29.762 860 mm,限差50.788 015 mm,满足限差要求,异步环闭合差检验合格。
5.4 重复基线较差

复测重复基线较差最大为IV05-IV07,较差为2.911 281 mm,限差40 mm。
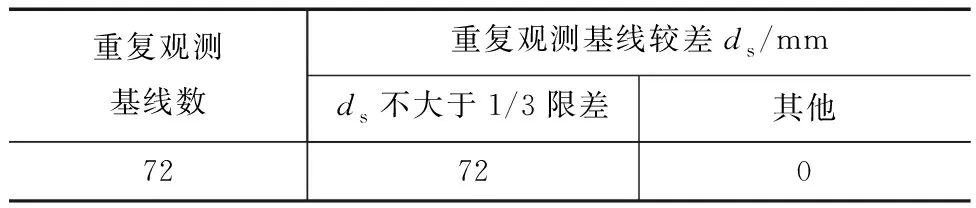
表2 重复基线较差ds统计结果
5.5 自由网平差
约束观测时间最长点的WGS-84空间直角坐标,进行GPS基线向量网的空间三维自由网平差,判定基线改正数及其他精度信息是否符合规范要求。
约束DQ01点的北京84空间直角坐标,进行基线向量网空间三维自由网平差,统计结果见表3。

表3 基线向量网空间三维自由网平差精度统计结果
6 高程控制网复测
高程控制网采用1台Trimble DiNi03电子水准仪按往返线路进行测量,水准铟瓦尺与仪器应配套。水准仪与水准尺在使用前均进行检校,附有鉴定报告,并符合下列规定:水准仪视准轴与水准管轴在竖直面上的夹角不超过规范要求,水准铟瓦尺应垂直。
高程复测从标尾A02开测,沿线路方向依次往返测量控制点,结束点为JM24。前后视视线长度小于50 m,单站前后视距差小于2 m,每站前后视距积累差小于5 m,视线高度三丝能准确读数。
本项目高程控制网的数据平差均采用科差软件按严密平差方法进行水准网数据处理,数据处理成果应符合规范的要求,并与设计院交桩成果中高程值进行分析比较。
7 主塔预埋棱镜的位置及安装
11#、12#主塔为H型索塔,下塔柱为向外伸壁,中塔柱为向内伸壁,上塔柱垂直向上,塔柱角为圆倒角。预埋棱镜选定为1对主塔埋设1对L型徕卡迷你小棱镜(棱镜常数为+17.5),埋设位置为下塔柱外倾圆倒角处,埋设时应使棱镜面面朝控制点位置,以便于后期测量时照准。棱镜使用膨胀螺栓进行预埋,并检查是否牢固,防止因外界因素使棱镜发生变化,预埋位置如图1、2所示。
图1 索塔俯视图
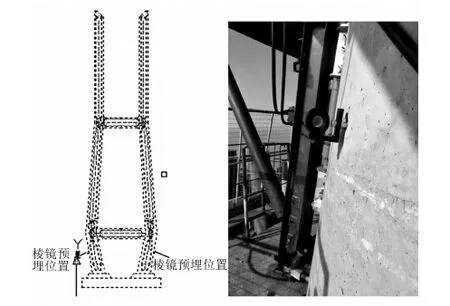
图2 棱镜预埋位置
8 测量时间的选定
本项目位于晋陕峡谷出口处,测量受风的影响比较大,尽量选在风力小于3级时进行。下塔柱施工时正值夏季高温天气,考虑光照、温度、湿度、大气折光对全站仪测量精度的影响,测量时间选定傍晚或清晨,以保证测量数据的准确性。
9 数据采集
使用全站仪进行三维坐标采集,预埋棱镜镜高选为0,后续测量棱镜高度保持不变,固定陵镜常数,后视精度满足《建筑变形测量规范》(JGJ 8—2007)的要求。测回数为4个,4个测回数据进行平均,以消除仪器自有误差。固定置仪点与后视点,并使用气压计、温度计、湿度计、对全站仪进行常规修正以保证测量精度。由于测量时间为傍晚或者清晨,可视性不是很高,全站仪采用自动照准功能并配合强光手电进行测量,每次测量之前应对仪器进行校正,以使标准差满足规范要求,消除因自动照准功能不准确而产生的测量误差。数据记录应按照规范要求进行记录并填写测量时间的天气情况。
10 数据的处理
由于采集数据为直角坐标,通过坐标无法判断棱镜位移情况,则需要判断测量点的向量变化值。计算办法为:根据主塔方位角进行方位旋转计算,判断出主塔实际位移方向,根据位移方向绘制塔柱位移变化图(图3)。角度旋转公式如下。
式中:x,y为物体相对于旋转点旋转β的角度之前的坐标;x1、y1为物体旋转β后相对于旋转点的坐标。
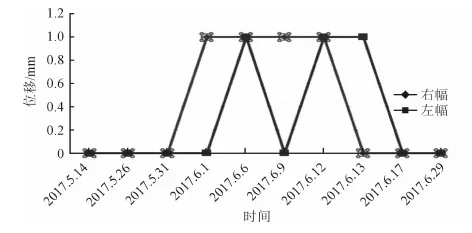
图3 塔柱位移变化
11 结 语
根据大量的数据可以得出布置合理且精确的控
制网,使用固定目标点、置仪点、后视点,使用精度为1″ 的自动照准全站仪,在选择合理天气,测量方法的情况下可以有效测出物体三维位置,通过角度旋转公式可以很直观的观察物体的位移变化,测得的数据准确具有参考性。通过准确的数据分析及现场对下塔柱与塔座接缝处的观察,塔柱在升高到50 m的时候中塔柱施工时,下塔柱自身重力产生的应力对其位移影响基本可以忽略不计也未发现接缝处有裂痕产生,测量中的塔柱位移变化量为仪器误差及测量误差。下塔柱为向外伸壁、变截面、圆倒角薄壁空心墩施工时,可不考虑位移影响的混凝土开裂,无需增加对拉措施。
参考文献:
[1] 刘校峰.桃花峪黄河大桥主塔下横梁与塔柱异步施工技术[J].西部交通科技,2013(1):41-42.
[2] 李艳青.G108河津至禹门口段改建工程路线方案研究[J].交通标准化,2013(13):23-25.
[3] 王学民.钻孔桩与护筒间缝隙漏水的堵漏技术[J].宁夏工程技术,2011(3):239-241.
[4] 张 宏.Excel在GPS基线解算精度统计中的应用[J].测绘与空间地理信息,2012(6):140-143.
[5] 黄 琛.索塔横梁设计中的关键性问题[J].广东公路交通,2013(4):35-37.
[6] 覃泽颖,黄 鹰,李 保,等.徕卡TS30全站仪测量精度测试与分析.[J].地理空间信息,2015(2):22-24.
[7] 程 都.基坑施工过程中对既有地铁隧道的自动化监测研究.[J].现代城市轨道交通,2017(8):32-33.
[8] 何有生.GPS控制在宣城市开发区水系调整规划测量综合应用的探讨[J].企业技术开发,2014(11):12-13.
[9] 杨小伟.孟加拉国PADMA大桥GPS控制网设计和测量技术[J].建筑工程技术与设计,2015(3):314-315.
[10] 郑国锋,李 磊.GPS静态测量在土地整理项目中的应用[J].黑龙江水利科技,2009(2):64-65.
[11] 吴 捷.顾北矿北一采区地表移动观测站设计[D].淮南:安徽理工大学,2014.
[12] 吴益梅.基于试验的独塔斜拉桥安全评价[D].西安:长安大学,2009.
[13] 刘 辉.基于GPS/GIS集成的滑坡外观监测系统的理论与应用研究[D].淮南:安徽理工大学,2006.
