电驱动拖拉机功率平衡控制策略设计与仿真
2018-06-28武峥
武 峥
(西山煤电集团公司 发电分公司,山西 太原 030053)
目前各国都在大力投入清洁能源车辆的研发与生产,有些已经取得了显著的效果。在农业机械方面越来越多地利用电驱动作为动力,最突出的便是电驱动拖拉机,拖拉机在田地里工作的特点是:阻力大、工作负荷不稳定、容易受到不可控制功率的影响,在这种情况下传统的拖拉机相对于电驱动拖拉机便突显了其缺点。电驱动系统能够在一定程度上减少负载变化时对发动机的冲击,主要是由于系统中提供主要动力的发动机、发电机组和驱动系统在结构上是相互分离的,它们之间都是通过电能来耦合的。这种耦合关系使它们之间没有直接的扭矩和转速关系,只是单纯的能量之间的耦合,所以电机以及电机控制系统便对拖拉机的动力性能起到了决定性的作用。为了提高效率可以将电机控制在最佳状态。最为关键的技术便是合理的控制系统,而控制系统的核心便是功率平衡。目前我国对此研究还处于起步阶段,本文基于此选择以电驱动拖拉机的功率平衡为研究对象,提出合理的控制策略[1].
1 电驱动拖拉机整机构架
电驱动拖拉机整机构架图见图1. 从图1可以看出,发动机、电动机和发电机是组成整个拖拉机动力系统的主要部分。该系统是利用交-直-交策略来控制功率平衡的,主要研究和设计通过母线电压来反应能源利用情况的方法,筛选出最为科学合理的控制方案以便达到理想的节能效果。

图1 电驱动拖拉机整机构架图
电驱动拖拉机的动力传递为:首先是发电机利用化石能源将化学能转化为电能输出,由于输出的是三相交流电所以需要对其进行整流,将电能变为直流电,再利用逆变器将直流电转化为交流电,但是在转化的过程中电能的频率是可以调节的。将可调交流电输出到电动机,通过电动机将电能转化为机械能驱动车轮运动。这便是整个动力系统的转化过程[2].
为了减少拖拉机在农田里作业时对土壤的压力同时增加拖拉机的稳定性,一般将其设计为四驱,即用于驱动拖拉机轮子的4个电机还有用于转向的电机等都是相互独立的。其中直流母线的电压是整个电驱动系统中极其重要的一个参数,其大小直接决定了发电机、马达、逆变器等关键设备的电压等级。整个系统的稳定性、安全性与母线电压的稳定有直接关系,母线电压的轻微波动都能够影响系统的稳定性。电驱动拖拉机的能量供应与需求能否在一定程度上达到协调与直流母线电压是否平衡有直接关系。如果电压降低表明供过于求,相反表明供小于求。
该系统将供电的直流母线电压按照约翰迪尔7030E系列标准设置为230 V,根据标准要求在电源提供的电压超出标准电压120%时驱动电机以及相关器件都能够稳定运行,同时当电源电压为标准电压的75%时电动机等驱动部件也能够在一定时间内处在最大电流下运行。综上所述,本文中直流母线稳定电压的额定值需要保持在80%~120%.为了使该系统获得更好的变频调速效果,要求直流母线上的电压必须稳定,发电机输出电流和电压是根据电动机的转速需求来调节的。
2 电驱动拖拉机功率平衡控制
母线电压是根据发动机转速和工作状况来调节的。整个系统的功率输入都是由发动机提供的,所以其工作状态是否节能直接关系到整个驱动系统的节能情况。
在控制电动机转速时需要考虑3个方面的需求:1) 在一定转速下电动机的输出功率能够满足系统驱动的需要,具体的要求是要保证拖拉机不能发生熄火或者是高速飞车,这需要通过两个方面来判断:a) 需要将需求功率与电动机能够提供的最大功率进行对比。b) 通过将需求的扭矩与电动机能够提供的扭矩前后对比。2) 电动机能够提供稳定的转速还需要一定的时间。3) 在能够满足需求的条件下将发电机的燃烧率控制在比较经济的区域。
因为电动机在接收到提速指令后需要经过一定的时间才能够将转速提升到设定值,这个提升的时间便是稳定时间。在这个时间段内电动机需要对其转速进行调节。如果电动机不能在稳定时间内提供系统所需求的功率则会导致电动机熄火。
通过分析得出需要设计一条新的转速-功率关系曲线参考电动机已有的速度曲线,将这条曲线作为调速的基准参考[3].
1) 调速曲线设计。
(1)
式中:
Pn_adj—当转速达到n时的输出功率,kW;
Pe—发动机现有的功率输出,kW;
Pspa—电动机的备用功率,kW;
Te—电动机能够提供的转矩;
ne—电动机的转速,r/min.
所有的参数中最为重要的是Pspa,如果取值太小,当负载突然增加时难以达到需求,电动机可能会发生熄火的现象;如果取值偏大则过于激进,会造成能源的不必要浪费。该系统中除了拖拉机需要电驱动外还涉及到喷雾泵以及地面阻力的不确定性,所以将参数Pspa预设为4 kW,后续根据实际应用情况实时调整参数值,直到达到理想状况为止。转速与功率关系曲线图见图2.

图2 转速与功率关系曲线图
2) 调速方法。当负载所需的扭矩增大,而电动机当前转速无法提供所需扭矩时便会发生电动机被拖死的状况。电动机转速和扭矩关系曲线图见图3. 由图3可知,转速在600~1 400 r/min时扭矩增加比较快,当转速达到1 800 r/min时扭矩达到了最大,然后随着转速的增加扭矩开始逐渐减小。所以可以推断出当转速大于1 400 r/min时发生拖死现象的可能性更大。
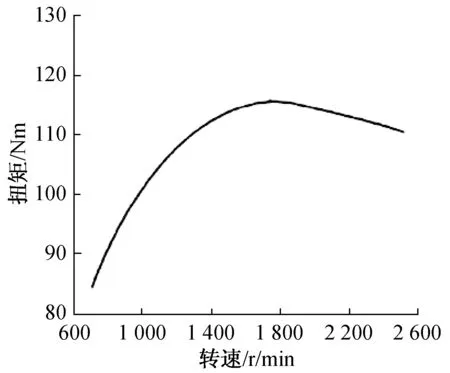
图3 电动机转速和扭矩关系曲线图
通过前面的分析可以得出另一种控制策略,即按照转速来划分备用功率。通过分析图3中的关系曲线选择以1 400 r/min的转速为划分分界点,利用式(2)来计算[4]:
(2)
式中:
Pspa_1、Pspa_2—备用功率,kW.
3 仿真试验及分析
利用Matlab中的仿真模块Simulink来建立两种控制策略的模型,然后进行仿真对比。在测试中输入负载功率[5].
简单工况下两种策略的工作状态图见图4,图5. 图4,5可以体现出:实际转速与转速指令之间的关系;负载需求扭矩与电动机当前转速下能够提供的最大功率之间的关系;负载需求功率与电动机当前转速下能够提供的最大功率之间的关系。从图4可以看出,即使整体上可以满足功率的需求,但在9~12 s这段时间内,负载的功率与电动机能够提供的最大功率基本相近,同时到达高速区域后稳定时间比较长,也就是从发出转速指令到达到特定转速需要的时间比较长,由0.5 s增加到了2.2 s. 而通过分析图5中的曲线可以看出,第二种策略调速时间短,稳定性增加,但是节能性变差也是一个不可避免的缺点。
通过前面两种策略的对比发现这两种方法都符合系统要求,但是由于策略二备用功率大,功率利用率低,经济效益差,所以从节能的方面考虑选择策略一。
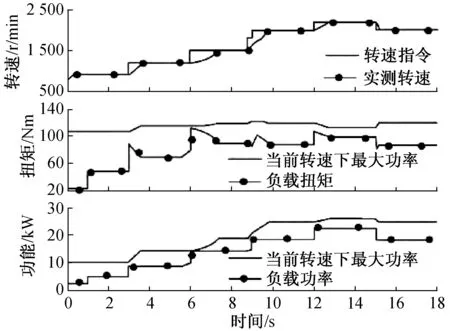
图4 策略一的发动机工作状态曲线图
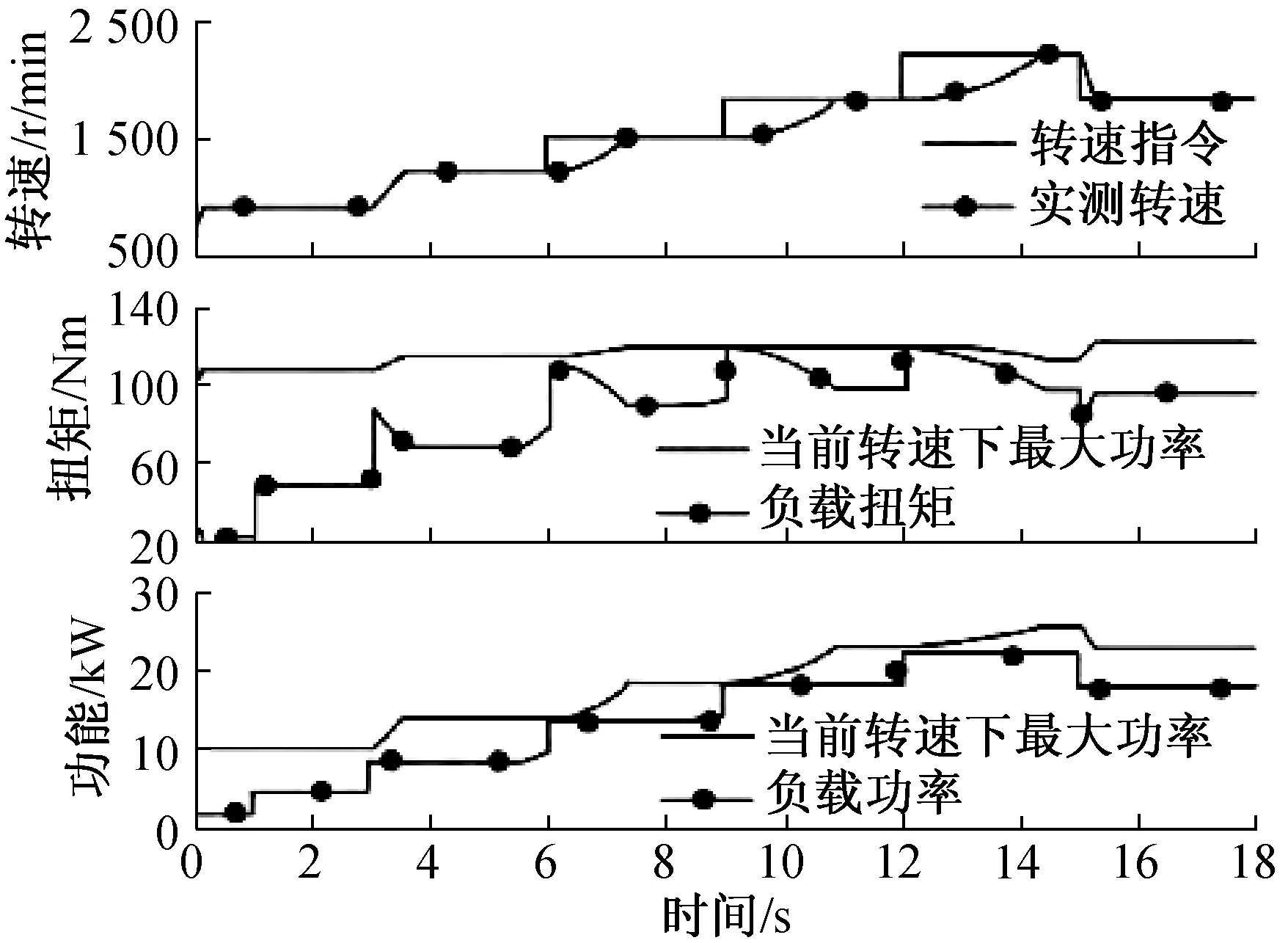
图5 策略二的发动机工作状态曲线图
4 结 论
本文对电驱动拖拉机的结构和控制策略进行了介绍,分析了两种功率控制策略的控制模型,随后在Matlab的仿真工具Simulink中建立相应的模型并进行对比。结果是两种控制策略都能够满足控制要求,但是出于节能以及经济效益的考虑,选择第一种控制策略。
参 考 文 献
[1] 陈庆樟,刘仁鑫,李晓珍. 我国电动汽车的研究现状及发展趋势[J]. 江西农业大学学报,2003, 25(51);163-167.
[2] 辛克伟,周宗祥,卢国良. 国内外电动汽车发展及前景预测[J]. 电力需求侧管理,2008, 10(1):75-77.
[3] 高辉松. 电动拖拉机驱动系统研究厂[D]. 南京:南京农业大学,2008.
[4] 黄 千,黄 英,张付军,等. 履带车辆电传动发动机一发电机组及其控制策略研究厂[J].车辆与动力技术,2006, (2):29-33.
[5] 张立伟,胡广艳,游小杰,等.混合动力电动汽车中电力电子技术应用综述[J]. 变频器世界,2006, (10):91-95.
