基于滑模速度控制器的永磁同步电机矢量控制系统性能研究
2018-06-28张苏英王跃龙刘慧贤李明召
张苏英 孟 月 王跃龙 刘慧贤 李明召
(河北科技大学,河北石家庄050000)
0 引言
永磁同步电机(PMSM)具有动态性能好、尺寸小、效率高等优点,因而被广泛应用于国防、农业和日常生活中[1-2]。PMSM又是一个多变量、非线性和高耦合系统,如何对其速度进行更好的控制,就成为一个关键问题。
传统的速度环PI控制存在速度超调且抗扰动性能差的缺陷,对此很多学者提出了自己的研究方法:第一种方法是应用FOC控制技术建立PMSM速度、电流双闭环解耦控制,能够降低系统的超调量,缩短响应时间[1];第二种方法是变速积分PID控制,但响应速度较慢,抗干扰能力较弱[2];第三种方法是基于RBF神经网络的速度PI-IP控制,能够减小速度超调、抑制扰动,但优化时间过长[3]。所以,研究如何更好地解决PMSM速度超调、抗扰动性能差等问题非常必要。
本文提出基于滑模变结构的速度环控制器,设计滑模面及切换函数。对系统进行建模和仿真分析,分析速度响应曲线,验证此控制策略的可行性。
1 永磁同步电机数学模型
为了便于分析,常做如下假设:(1)定子绕组三相对称,气隙均匀,忽略末端效应;(2)忽略磁饱和和铁损,磁路呈线性;(3)转换器提供理想的三相电源,忽略高次谐波;(4)忽略转子轴的摩擦。
在运动d-q坐标系下,定子电压方程为:
电磁转矩方程为:

电机运动方程为:

式中,ud,uq为定子电压的d-q轴分量;id,iq为定子电流的d-q轴分量;Rs为三相绕组电阻;ωr为电角速度;Ld,Lq为电感的d-q轴分量;Ψfr为永磁体在定子上产生的耦合磁链;Te为电磁转矩;Tl为负载转矩;Pn,J,B分别为电机极对数、转子惯量、粘滞摩擦系数。
2 滑模速度控制器设计
滑模变结构控制具有不连续性,即系统结构随时间变化的开关特性。滑模面一般是固定的,且与系统的参数和扰动关系较小,鲁棒性较好[4]。
令状态量x1表示速度误差,x2=x˙1表示调节器输入,u=iqref表示调节器输出,综合上述方程,可得系统数学模型:
得到系统状态空间方程:

在考虑系统转速受限的情况下,取滑模切换函数为:s=kx1+x2。令滑模变结构调节器的输出为:

根据滑模运动的可达性条件ss˙<0,可以得到滑模变结构调节器参数为:
3 永磁同步电机仿真
3.1 PMSM滑模速度控制系统框图
用滑模速度控制器代替传统的PI控制器,来满足电机控制性能的需要。PMSM滑模速度控制系统框图如图1所示。
3.2 基于滑模速度控制器的永磁同步电机矢量控制仿真模型
永磁同步电机和逆变器模型直接用Simulink里面SimPowerSystems的零件库模型。使用id=0控制方法,通过滑模速度控制器控制dq轴转速。基于滑模速度控制器的永磁同步电机矢量控制仿真模型如图2所示。
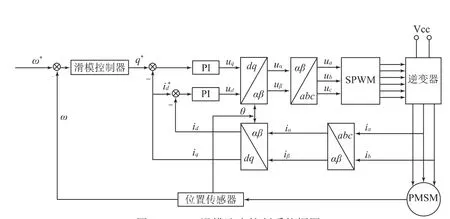
图1 PMSM滑模速度控制系统框图

图2 基于滑模速度控制器的永磁同步电机矢量控制仿真模型
4 仿真结果
根据上面提出的滑模速度控制器仿真框图,建立滑模速度控制器仿真模型,运行于Matlab。总模拟时间为t=0.4 s,参考转速为正反向600 r/min,初始时刻负载转矩为Tl=0 N·m,0.2 s时负载转矩Tl=10 N·m,仿真结果波形如图3、图4所示。
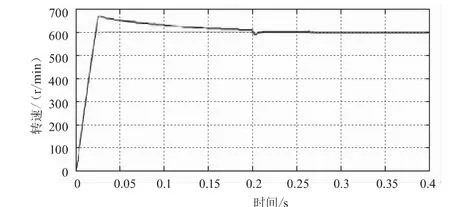
图3 滑模控制和PI控制正转对比图
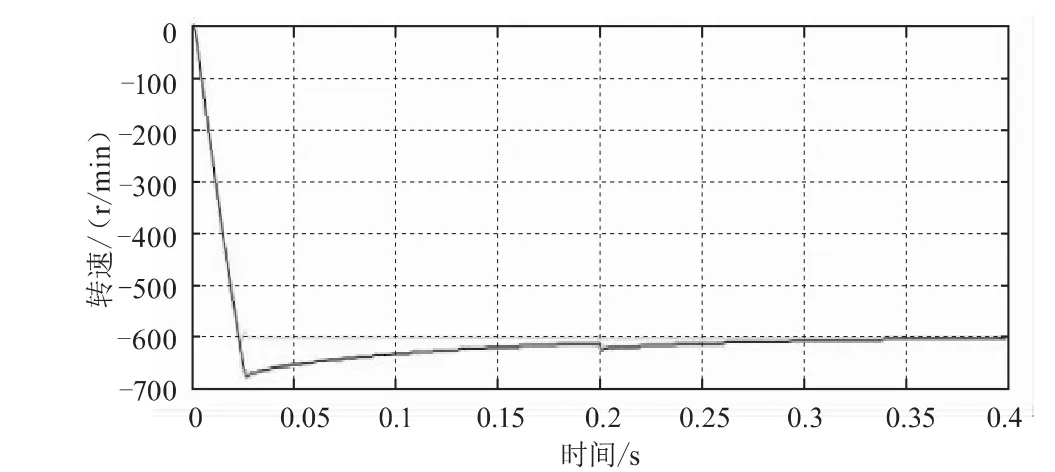
图4 滑模控制和PI控制反转对比图
由仿真结果可以看出,电机无论正转还是反转,转矩突然增加时,滑模变结构速度控制器明显比普通的PI控制超调量要小,且具有较快的动态速度响应;在突加负载转矩时,滑模变结构速度控制器速度波动较小。
5 结语
本文针对基于滑模速度控制器的永磁同步电机控制,对PMSM的正反转特性进行了仿真研究。结果表明,采用滑模变结构速度控制器时,系统速度超调较小,且抗扰动性能较强,证明滑模速度控制器是一个很好的控制算法,为实际PMSM速度控制性能的研究奠定了基础。
[1]陈娜,冯勇,史宏宇.基于FOC的永磁同步电机速度控制器参数优化设计[J].伺服控制,2011(8):29-32.
[2]杨明亮,刘军,兖涛,等.永磁同步电机变速积分PID调速控制[J].信息技术,2015,39(4):19-22.
[3]周佳,卢少武,周凤星.基于RBF神经网络的永磁同步电机速度PI-IP控制[J].组合机床与自动化加工技术,2017(1):116-118.
[4]ZHANG B T,PI Y G.Enhanced sliding-mode control for permanent magnet synchronous motor servo drive[C]//Proceedings of the 2011 Chinese Control and Decision Conference(CCDC),2011:122-126.
