基于改进人工势场的采摘仿生机械手设计
2018-06-28赖辉平
赖辉平
(集美大学机械与能源工程学院,福建 厦门 361021)
现有的机械手进行采摘时,果实的识别率和采摘率较低,并且果实的损伤面积较大。为此专业人员对成本低廉、实用性强的采摘机械手进行了专门的研究。对采摘机械仿生手的手指关节进行电子控制设计引起了很多专家和学者的重视。
1 采摘仿真机械手指结构概述
在进行水果采摘的过程中,由于机械手指灵活度较低的原因,使其很容易损伤水果的表面,并且损伤面积大,损伤率较高,需要将人类手指作为仿造依据,设计一种类人仿生机械手。该机械手将人类手指作为设计参照,设计的手指要具有一定的柔软接触面,使其具有人类手指的真实触感,其关节要具有高度的灵活性和敏锐性,采用开环控制对其关节进行操作,利用微电机进行操控手指,将苹果采摘作为例子。
为了降低成本,要对其中的3个主要手指进行重点研究,在设计过程中,利用微电机控制对3个手指进行控制,使其相互作用,其设计整个效果如图2所述。
将微电机和电子虚拟总轴来相互结合,对仿生机械手的关节和手指关节进行同时控制。电子虚拟总轴在接到信号以后,总轴对其信号进行作用,在此基础上得到各台电机的输入信号,并且交由总轴进行共同协调,使各个手指关节电机同时跟随运动,实现了机械手整体的有效控制。
2 采摘仿生机械手优化设计
2.1 果成熟度的识别阈值的设定
在对仿生机械手的设计过程中,将机械手作业水果图像的特点作为依据,融合于色彩空间理论设计其水果成熟度辨别阈值,具体的步骤如下。

图2 仿生机械手结构示意图
借鉴色彩空间理论对水果的色彩分布区域进行标准,假设,由{x, y} 代表其水果色彩模型的分量值,将值为1的元素连接成的范围定义为水果色彩的分布区域,该区域由ed′f来表述,利用式(1)对水果的颜色空间进行转化:

在上式中,gd′ (d )代表二维色彩分布密度图,Ss′wdg代表样本图的噪声向量。
在水果的目标区域,噪声的含量较小,且水果目标区域只是含有少量的非零元素,从而很好的抑制了噪声的干扰,水果目标区域内部点膨胀后,会使得水果稀疏区域格外紧凑,在获取水果表面颜色色彩空间参考表后,可以判别任意一个像素点是否为目标像素点,假设由χl′po代表水果目标像素点的数量,利用式(2)得到果成熟度的识别阈值:

在上式中,df′代表水果目标范围外部,re代表水果图像的各个区域。
2.2 机械手动刀片剪切力与手柄扳动力比值的计算
传统的机械手设计方法没有衡量电机间的协同作用,因此,先计算距离最相近的电机间引力势场,采用电机同步控制驱动人工势场,利用PID对其控制阈值进行计算,得到机械手的剪切和剪力间的比值,由此实现采摘仿生机械手优化设计。具体的步骤如下。
假设由ud′f代表驱动采摘机械手指的电机的电压,As′ed代表设计系统的回路中的总电阻,利用式(3)计算距离最相近的电机间引力势场:

在上式中,Xs′de代表绕组的电感,η代表机械手的直流电机的转速。假设由v′swe代表最大的回路电流,代表其相应的感应电动势,S′zxdf代表电机的同步控制,利用式(4)控制阈值:

3 实验及仿真证明
为了更好地验证基于改进人工势场设计方法进行采摘仿生机械手设计可行性,需要进行一次实验。在Mat Lab /Simulink 平台下搭建采摘仿生机械手设计的实验仿真平台。实验数据来源于苹果采摘为研究对象的数据样本,由此进行仿生机械手的实验测试。
3.1 评价指标的设定
将实验分为两个阶段,在实验的第一个阶段,将果实的损伤度作为评价指标来定义基于改进人工势场进行采摘仿生机械手设计的精度。在实验的第二个阶段,为了彰显实验的全面性和公正性,将传统方法作为对比方法进行共同的分析和对比,从对采摘仿生机械手控制的误差这方面来定义不同方法进行采摘仿生机械手设计的有效性。
3.2 基于改进人工势场的果实采摘损伤度
基于改进人工势场设计方法进行采摘仿生机械手设计,对比本文方法进行行采摘仿生机械手设计的果实采摘损伤度,对比结果见图3。
从图3的仿真实验中可以分析得出,利用改进人工势场设计方法进行采摘仿生机械手设计,可以促使机械手的距离最近的两个电机间互相协作,给出各个电机间的协同关联性,从而保障基于改进人工势场设计方法进行采摘仿生机械手设计的整体优越性。
3.3 不同方法控制误差的对比
分别采用本文方法和传统方法进行采摘仿生机械手设计实验,对比不同方法进行采摘仿生机械手设计控制误差,对比结果见图4。
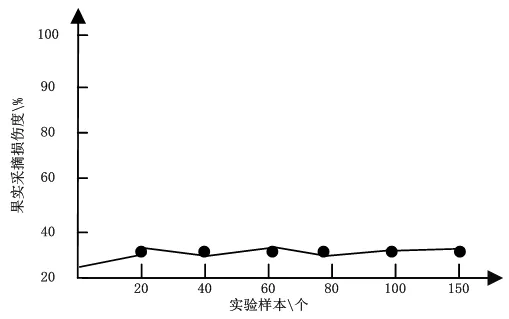
图3 基于改进人工势场的果实采摘损伤度
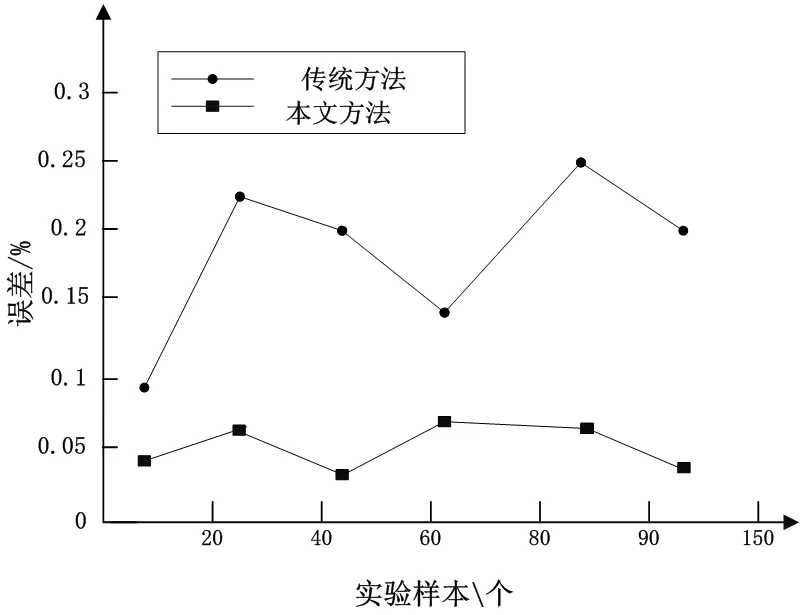
图4 不同方法进行采摘仿生机械手设计控制误差
从图4的实验仿真结果可以看出,利用本文方法进行采摘仿生机械手设计的整体优越性要高于传统方法,这主要是因为利用本文方法进行采摘仿生机械手设计可以抵御了电机负载扰动因素对机械手的手指动作不灵活的干扰,通过计算出其机械手的剪切和剪力间的比值,来完成对采摘仿生机械手设计,保障了本文方法进行采摘仿生机械手设计的整体优越性。
4 结语
利用改进的人工势场模型,利用微电技术和多关节微电机的协同控制虚拟系统的优势,对采摘机器人仿生机械手进行设计,提升了采摘机器人手指关节的灵敏性,给出各个电机间的协同关联性,抵御了电机负载扰动因素对机械手的手指动作不灵活的干扰,通过计算出其机械手的剪切和剪力间的比值,来完成对采摘仿生机械手设计。实验仿真证明,该方法设计精度较高,极大降低了机械手手指间的速度差异,能够满足机械手协同控制的设计需求。
[1] 吕继东,赵德安,姬伟.苹果采摘机器人目标果实快速跟踪识别方法[J].农业机械学报,2014,45(1):65-72.
[2] 赵德安,刘晓洋,陈玉等.苹果采摘机器人夜间识别方法[J].农业机械学报,2015,46(3):15-22.