正铲挖掘机运动学分析新思路
2018-06-24钟伟周陈谊超
钟伟周,陈谊超
(1.广西南南铝加工有限公司,广西南宁 530031;2.耐世特汽车系统(柳州)有限公司,广西柳州 545006)
0 引言
大型正铲挖掘广泛应用于煤炭开采,目前世界上著名的正铲液压挖掘机构是由德国O&K公司推出的[1](图1)。该装置在水平直线挖掘时,只需要推动斗杆即可;在动臂提升时,可保证铲斗与水平面所成的角度在运动过程中不变,保障满足了平稳提升;此外,在机构整个运动过程中,提升力矩和提升力始终保持不变,因此不需要在提升过程中加大油缸的压力或直径。对于正铲液压挖掘装置的研究,国内外专家学者也做了大量工作。以特雷克斯公司的正铲挖掘机为研究对象的例子较多,如Andrew Hall[2]对公司的RH200在不同挖掘形式下系统地研究了挖掘效率及其使用寿命。Hall,A.S.和 McAree,P.R[3]则提出了一种控制算法,对铲斗的移动位置进行了有效跟踪。而Kecskemethy,A.[4]和他的学生则对该公司的RH-340利用环路转换的方法完成了运动学研究和挖掘力分析。机构的运动学分析是判断机构好坏的关键[5-6],而对该工作装置的运动学分析还没有统一的分析方法。利用数学矢量方程,对该大型液压挖掘机进行了运动学正反解的分析,给出了该装置运动学分析的一种指导方法。

图1 正铲液压挖掘机
1 工作装置机构图及自由度分析
首先绘制出该工作装置的机构运动简图(图2)。该工作装置由大臂、上转台、动臂液压缸组件、强力三角、铲斗液压缸组件、铲斗、斗杆组成、斗杆液压缸组件和过渡连杆组成,各部件之间通过转动副连接。
依据计算自由度的公式[7]见式(1)。

式中n——活动构件数目
pL——低副数目
pH——高副数目
将 n=12,pL=15,pH=0 代入式(1),可得该装置的自由度为3。即铲斗能实现一个转动和2个方向的移动自由度,可以满足挖掘机日常工况需求。
2 运动学正反解分析
实现机构控制主要基于机构的运动学分析。由图3可知,该工作装置由12组连杆组成的封闭运动链机构,用传统的解析方法分析比较有难度,因此,利用数学矢量方程按照模块进行分析,然后针对它们之间的几何关系实现对该工作装置的运动学分析。为便于机构的正反解分析,建立如图4所示的坐标系。
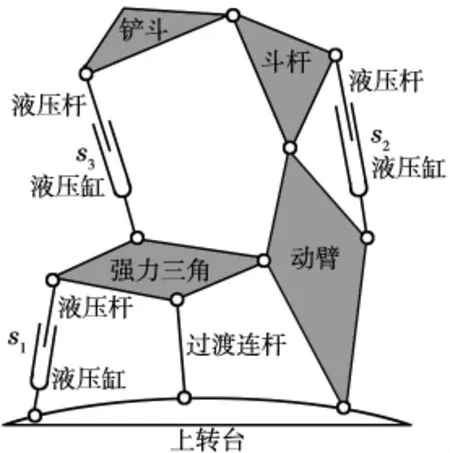
图2 工作装置
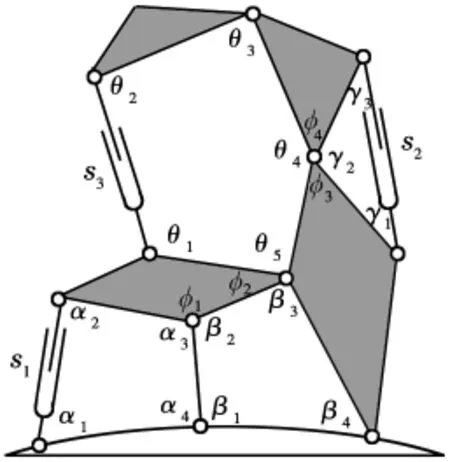
图3 工作装置的机构示意
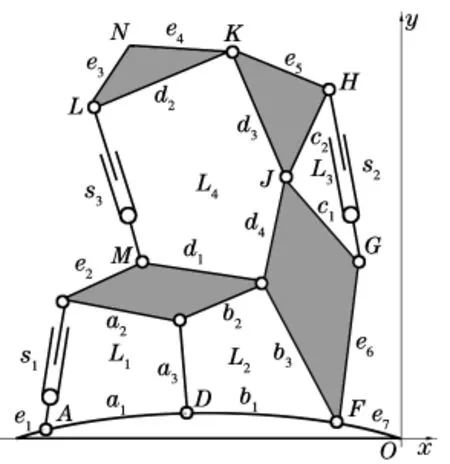
图4 工作装置的结构参数
2.1 运动学正解分析
运动学正解,即在已知机构的液压缸的驱动尺寸的情况下,对末端执行器的位置和姿态完成求解。该机构主要由4个几何平面模块构成,首先对4个几何平面模块的正解进行分析,然后根据几何矢量关系,分析整个工作装置的正解。
2.1.1 几何模块L1和L2
已知L1和L2构成了1个平面5杆2自由度的基础几何模块,液压缸s1提供驱动输入,因该机构为2自由度机构,所以需要2个输入。首先假定α1为虚输入,由余弦定理可得,见式(2)~(9)。
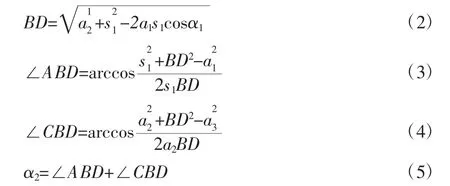
同理求得 α3,α4。在 L2的几何模块中,β1=360°-α4-φ5,β2=360°-α3-φ1,则

同理可以求出β3和β4,由上式可以消除虚输入α4。
2.1.2 几何模块L3
已知L3模块是一个几何平面4杆机构,其自由度为1,驱动输入由液压缸s2提供。由余弦定理可得

同理可以求出γ2和γ3。
2.1.3 几何模块L4
几何模块L4是一个6杆3自由度的平面机构,已经液压缸s3提供一个输入,而通过计算几何模块L1和L2,可推得输入θ5,通过计算几何模块L3可以得到输入θ4,从而确定该模块的3个输入,参照模块L1和L2的求解方法,可以轻松求解到L4模块。
2.1.4 整机分析
利用几何矢量表示各个部件,建立机构的封闭矢量多边形方程,建立直角坐标系(图4)。液压缸的驱动尺寸s1,s2,s3及各构件的长度已知,假设 x轴与 OF,FG,GH,HK,KN,GJ和 JK 的夹角分别为 φ1,φ2,φ3,φ4,φ5,φ6和 φ7,则有式(11)~(15)。
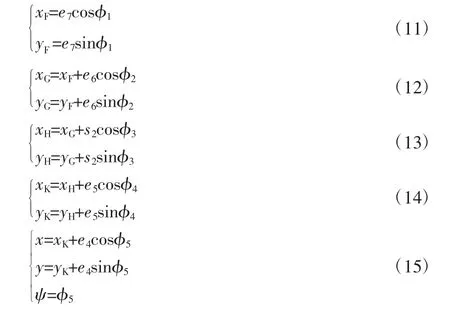
由以上各式可求得末端执行器的位置和姿态。
2.2 运动学反解分析
已知末端执行器的位置和姿态如式所示,求得该位置和姿态下的3个液压缸的驱动尺寸,即为位置反解。过程见式(16)和(17)。

由式(16)和(17)可求得 φ6和 φ7,进而求出 γ1和 β4,从而求出3个个液压缸的驱动尺寸。
3 运动学分析数值算例
设定机构中相邻铰点之间的尺寸关系如表1所示,杆件之间的夹角关系:φ1=70°,φ2=100°,φ3=60°,φ4=50°,φ5=130°。分别设定5组液压缸的不同长度尺寸(表2)时,得出铲斗的位置坐标和姿态角如表3所示(取整数部分)。将表3得到的5组铲斗的位置和姿态角作为反解的已知条件,进行求解得到3个液压缸的5组驱动尺寸,如表4所示(取整数部分)。表3和表4只取整数部分的结果来分析,表2和表4中的液压缸的驱动尺寸完全一致,说明运动学正解和反解分析都是正确的。
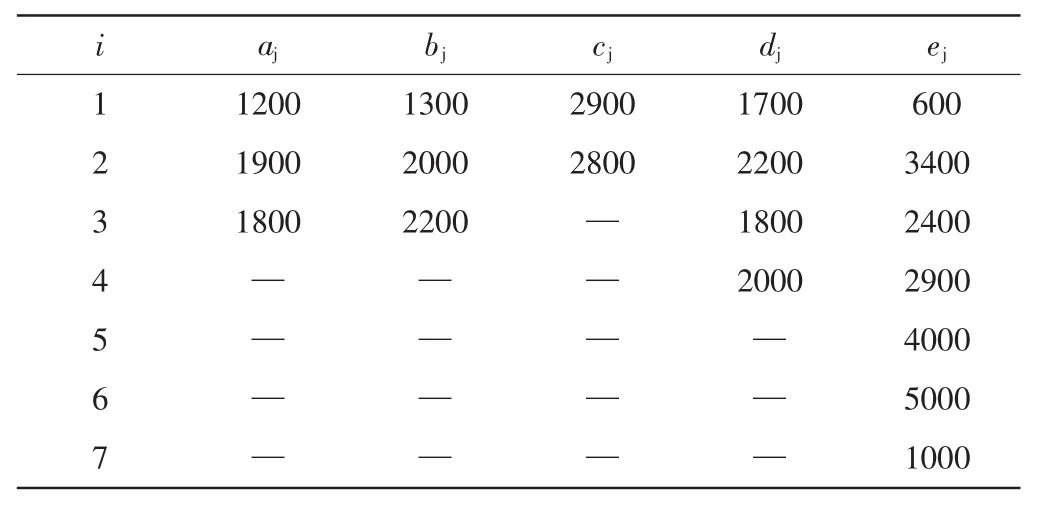
表1 相邻铰点之间的尺寸关系 mm
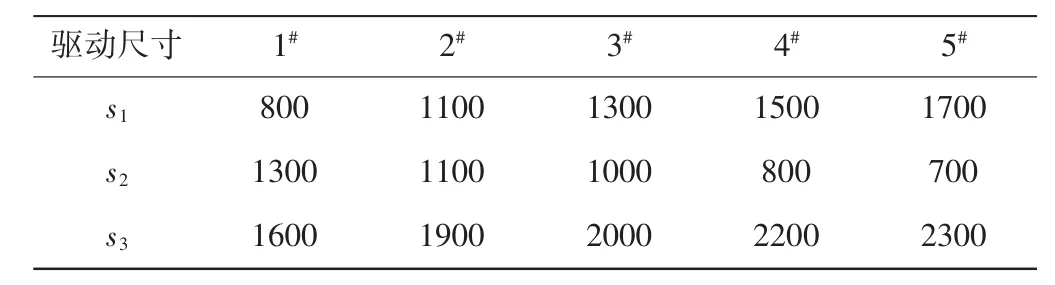
表2 5组不同的液压缸尺寸 mm

表3 铲斗的位置和姿态 mm

表4 反解液压缸的驱动尺寸 mm
4 结论
研究了著名的德国“强力三角”正铲挖掘机的运动学分析,该工作装置完全满足正铲挖掘机的2个水平自由度和1个旋转自由度。采用矢量方程的理念,分析了该工作装置的运动学正反解,并给出实例验证。该分析方法为这种复杂机构的运动学分析提供了一种新的思路。
