电动舵机舵片组件设计与运动仿真分析
2018-06-24吴国新王贵程徐小力
江 波,吴国新,王贵程,徐小力
(1.北京信息科技大学现代测控技术教育部重点实验室,北京 100192)
0 引言
舵机,又称伺服马达,是一种具有闭环控制系统的机电结构,是控制系统不可或缺的重要组成部分。伴随着对飞行器速度的需求逐渐增高,控制系统的精度、灵敏度以及可靠性越高,越受到人们的追捧和喜爱。舵机一般分为气动舵机、液压舵机和电动舵机等。3种舵机典型性能指标比较,如表1所示。
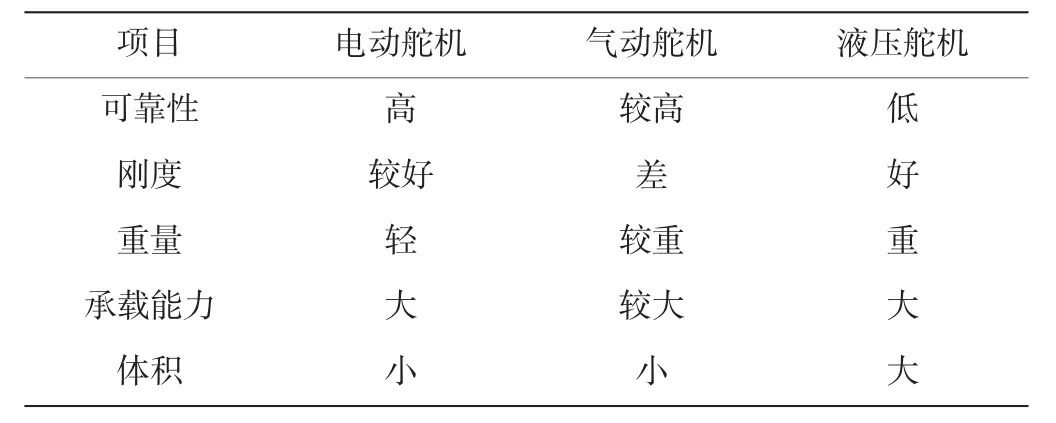
表1 3种舵机性能比较
和其他类型舵机相比,电动舵机具有更新换代迅速、体积小质量轻、承载能力突出、控制精度高等优势。随着社会生产力的不断发展和科学技术水平的不断提高,电动舵机技术得到了进一步的发展,已成为各种飞行器上普遍使用的舵机结构之一。电动舵机传动机构中,舵片组件是实现最终精确控制的核心执行机构,是体现电机负载轨迹、操纵力矩、舵片转角、响应速度、集成化程度等重要技术指标的关键部件,对其开展结构设计与运动仿真分析具有重要意义。
1 电动舵机工作原理与特性分析
电动舵机主要由外壳、电路板、驱动马达、执行舵片摆臂、位置检测器等所构成。工作原理是由控制器发出脉冲宽度调制信号给舵机,经电路板上IC处理计算出得到转动方向与转角,驱动马达转动并经减速齿轮将动力传至舵片摆臂,同时位置检测器进行位置信息判断与反馈。工作原理如图1,舵机控制器多采用 PID(Proportion,比例;Integral,积分;Derivative,微分)控制,以满足舵机动静态指标要求;伺服功率放大器一般由脉冲宽度调制器和开关控制电路组成;直流伺服电机是电动舵机的执行元件,可采用有刷或无刷直流电机;减速机构一般采用蜗轮蜗杆或丝缸减速机构。
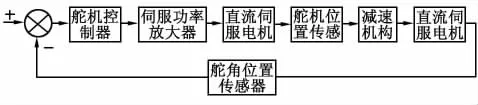
图1 电动舵机工作原理
作为高精度的伺服系统,电动舵机将接收到的控制指令信息转变为机械运动,舵机系统的动态和静态特性将直接影响到控制系统的操纵性能。电动舵机必须具备的基本技术设计要求,主要包括:最大舵偏角、空载时最大偏转角速度、控制稳定性、舵体体积等。在实际设计应用中,需要重考虑舵机的稳定性、舵面负载特性、使用时间与价值等。
在进行电动舵机舵片组件设计中,对舵面的负载特性分析是实现舵机可靠运动的前提条件。结合线性化方法,对舵机平衡状态附件的增量运动进行动特性分析,将电动舵机负载情况下动特性描述为一个二阶无阻尼振荡环节与一个惯性环节的串联结构。有负载时,舵机转体输出转角正比于输入电压,且与动压成正比。其稳态输出会随飞行状态的变化而变化,在动压增大时稳态偏转角会相应减小。另外,随着运动状态的不同,往往产生的影响也会有不同,尤其是舵片组件执行运动过程中,随着舵面动压的增大,铰链力矩会急剧增大,从而设计中需要把舵面偏转位置控制在压力中心变化范围中间,以达到减小铰链力矩目的。
2 结构设计与建模
2.1 舵转体结构设计及三维建模
根据以上工作原理与特性分析,结合实际功能要求,对舵转体结构进行设计,在舵转体平面图基础上,采用solidworks软件生成舵转体三维图形,如图2所示。
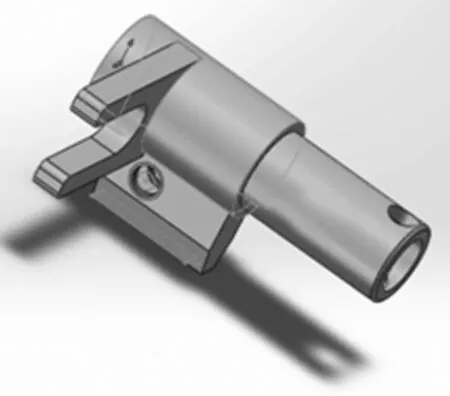
图2 舵转体三维结构图
2.2 舵轴组件结构设计及三维建模
根据功能要求进行舵轴组件整体结构进行功能设计。在solidworks中生成的舵轴组件装配三维结构图如图3所示。
舵轴组件是由舵片、锁紧钢珠、舵转体、锁紧弹簧、弹簧堵头、连接销、连接杆、舵片转轴、开槽平端紧定螺钉等组成。在进行舵片组件的结构设计时,必须充分考虑舵面偏转位置范围,以达到减小铰链力矩的设计要求。设计开发的舵片三维结构,如图4所示。此外,锁紧钢珠和锁紧弹簧的作用是使舵片展开,并防止舵片收回,该部分组件构成的连接杆三维图形,如图5所示。
图3 舵轴组件装配体
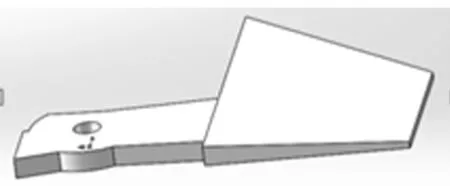
图4 舵片结构三维图

图5 连接杆三维结构图
3 电机动态特性校核
在以上结构设计的基础上,进一步开展电机动态特性的校核实验。电机动态特性校核的主要目的就是考察舵机组件在电机负载突变时其设计性能指标的准确性。一般电机动态特性校核考虑的主要指标有电机的速降、恢复时间,超调量等。
定义电机力矩平衡方程,见式(1)。

式(1)中:Jd为电机转动惯量;Jz为传动机构转动惯量,η为传动效率,Z为传动比,KD为转动阻尼系数,θ为电机轴转角,ML为负载力矩(N·m),Me为电磁力矩(N·m)。
校核实验时舵机采用正弦控制,定义舵片转角为:φ=φmaxsin(ωt),φmax=10°,ω 为角速度(°/s)。舵机传动比设定为:Z=80。通过传动比计算公式得出电机的运动方程,见式(2)。

舵机负载力矩为弹性负载力矩,见式(3)。

将式(2)和(3)代入式(1)整理后得到式(4)。

由此可得电机负载轨迹最大功率点的力矩和转角,见式(5)。

根据功能设计要求的参数值:额定负载力矩8 N·m,额定负载角速度≥100°/s,在额定负载力矩条件下,施加峰值为10°的正弦指令信号,舵摆角动态要求为10 Hz频率下,幅值达到-3 dB。
由上述要求得到式(6)。
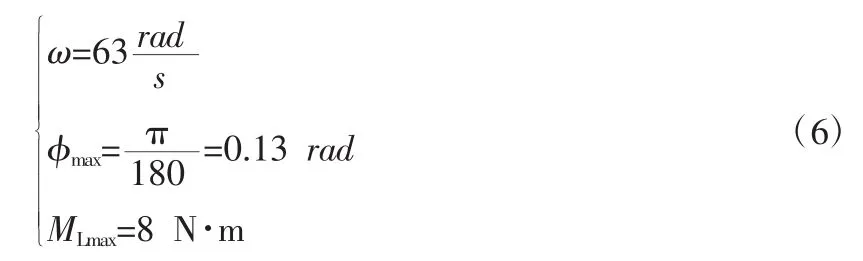
将式(6)数据代入式(4),则动态负载轨迹方程为式(7)。
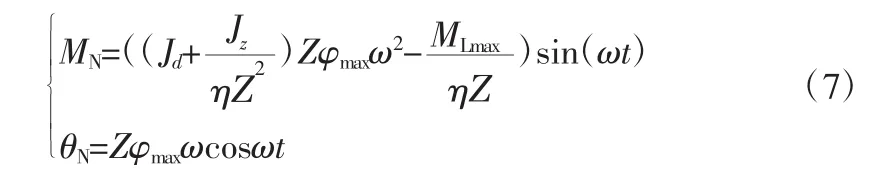
经过上述对电机动态的校核,校核结果正确,电机负载轨迹最大功率点的力矩和转角与理论结果一致,校核实验完成。
4 结论
随着现代信息技术的快速发展,电动舵机在各个领域的应用已十分广泛,对电动舵机的整体性能也要求越来越高,舵机的整体性能也朝着体积小、质量轻、承载力强、控制性高的方向发展。结合实际需求对电动舵机的工作原理与特性进行分析研究,开发设计了满足功能指标的电动舵机舵片组件。在建立三维仿真图形基础上对舵机进行运动仿真和特性校核实验,保障了电动舵机舵片组件设计指标的准确性,提供了进一步开展实物研制的理论支持。
