特殊作业现场及人员状态监测指挥系统
2018-06-24乔文生徐小力谷玉海吴国新艾士娟
乔文生,徐小力,谷玉海,吴国新,艾士娟
(1.北京航天拓扑高科技有限责任公司,北京 100176;2.北京信息科技大学现代测控技术教育部重点实验室,北京 100192)
0 引言
长期以来,火灾一直是全球面临的共同灾难性问题,造成了大量生命、财产的严重损失。城市中大型公共建筑和高层建筑火灾不断发生,不少火灾造成了消防人员的伤亡。针对火灾,消防部队是灭火救援的主体力量,现场指挥工作在整个灭火过程中发挥着核心作用,直接关系到火灾扑救和抢险救援的成败,以及现场人员的生命安全。目前消防救援现场指挥装备方面存在的主要短板是火场状态信息缺失,指挥人员对现场情况掌握不够充分。对于消防救援现场人员(包括消防人员、现场被困人员等)的基本状态信息,如人员位置和生命体征状态等信息,以及现场环境的易燃易爆有毒有害气体浓度、温度等状态的感知严重缺失。需要通过实现对救援现场人员的精准定位,及其所处环境和自身生命体征信息的全面检测,并传输到后场指挥部,使得指挥员实时、准确地掌握现场救援人员的状态和周边环境状态,有效提升对消防人员、装备、环境信息的采集能力,提高救援指挥系统的效能。
1 系统总体目标
1.1 现场状态采集
火灾现场的状态直接影响救援的效果,如果对现场救援对象的性状不了解就有可能造成救援任务的拖沓甚至失败。需要对救援现场是否存在易燃易爆气体、其浓度多少;救援人员的生命体征,如心率、血压等参数,救援人员的运动轨迹、位置信息,救援人员所用空气呼吸器的剩余气量等信息进行实时采集,并传输到后场指挥部。
由于易燃易爆气体种类很多,不可能实现全部易燃易爆气体的监测,选择CO,CO2,CH4和可燃气体作为检测对象。需要一款多功能气体报警仪采集并传输心率、体温是现场救援人员生命体征的关键指标。通过手环的方式将现场救援人员的这两个指标采集并传输。
1.2 数据无线传输
针对消防人员在灭火救援和现场指挥中,通过覆盖全场的一体化通信指挥网络,对火场进行全面的信息采集和准确状态评估,智能化的指挥应用。设计单兵数据采集器采集气瓶压力并与人员定位装置、气体分析仪、生命体征手环等采集部件之间采用蓝牙无线通信,同时,该采集器作为单兵电台与后场主站电台之间通过1.4 GHz载波无线电通信。系统的拓扑结构及通信关系如图1所示。系统无线通信信号的选择见表1。
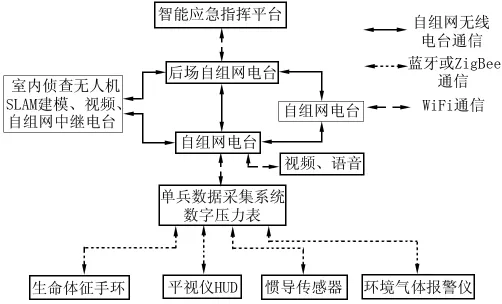
图1 系统拓扑结构及通信关系
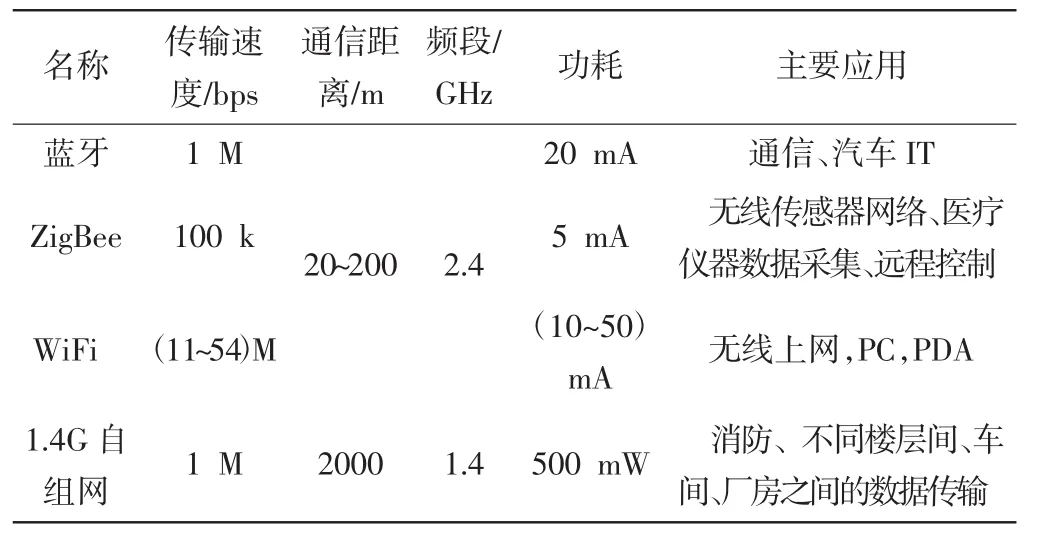
表1 系统无线通信信号的选择
2 系统的实现
2.1 应急指挥系统软件
应急指挥系统软件选用JAVA语言开发,三维建模是软件编程的难点之一,应急现场需要快速建立建筑物的三维模型。比较简便的方法是直接从百度地图、高德地图等引擎中找到该建筑物的位置,用线段勾勒出建筑物的外轮廓线,再根据现场估计每一层的高度。如果有建筑物的CAD(Computer Aided Design,计算机辅助设计)图,应可以导入各层平面图,快速构建建筑物简易3D模型,如楼梯、楼道、墙体、门等关键信息的景象。在3D模型中应可以展示应急点(如火灾)的位置、应急资源如消防栓的位置。
2.2 人员定位信息及轨迹
在消防灭火、应急救援、反恐等突发事件中各参战人员的位置及人员状态信息十分重要。应急情况发生时,如果在空旷的室外,如果有卫星信号可以用GPS(Global Positioning System,全球定位系统)或北斗信号进行定位和导航,如果预先布置有电信基站、AP(Access Point,无线访问节点)节点、Wi-Fi基站,则可以通过电信蜂窝或节点定位技术实现人员定位。但在实际生活中,发生火灾或应急事件的场所更多的是内部空间,比如地下空间、隧道、大型楼宇构筑物等内部空间。而这些场所安装有AP节点、WiFi基站等可用于定位设施的概率很小。并且,部分场所虽然有,但在火灾等情况出现时原有设施能有效工作的概率也较低。因此需要通过一种传感器将参战人员的位置信息及时传回到后场指挥部,指挥人员看到根据人员位置坐标绘制的运动轨迹,从而知道参战单兵所处位置,并可以依靠单兵在一定时间内的运动情况,判断该单兵状态是否正常,是否需要对该单兵予以支援或支援的具体位置及路径。
采用具有自主定位功能的无线传感器的目的在于解决现有预置节点定位技术的不足,满足在无预先布置定位节点的条件下,测量人员运动轨迹及定位信息。该自主定位无线传感器自身包含有电源系统,可测量携带该传感器的人员的位置坐标和人员运动姿态,并可以通过蓝牙或ZigBee协议将数据传输至配对的无线数据采集器。
无线定位传感器可以判定人员运动姿态。所述微型惯导传感组件可以测量运动载体的轨迹和姿态参数即:横滚角、俯仰角、偏转角、角速度、加速度偏差经过具有适当增益的6态卡尔曼滤波而得到最优估计,适用于运动或振动状态下的姿态测量。不管惯性器件的精度多高,惯性单元(加速度计、陀螺仪)有其固定的时变静态误差——随着工作时间的增长,测量数据会产生不可避免的误差(这也是纯惯导系统的主要误差源之一,它对位置误差增长的影响是时间的三次方函数)。卡尔曼滤波是去除噪声还原真实数据的一种数据处理技术,在测量方差已知的情况下能够从一系列存在测量噪声(误差)的数据中,估计动态系统的状态。通过实验测量,建立惯导测量数据的静态误差与时间的关系模型,并将该模型与惯性单元的测量值结合,做卡尔曼滤波处理,即可得出一个过滤掉静态误差的更精确的数据结果。人员定位信息要与3D建模的数据统一坐标系,最终将人员轨迹数据在3D建模的图像中展现出来,可以看到人员在建筑物中的行走轨迹及位置(图2)。
2.3 环境气体、生命体征、抬头显示仪
环境气体主要是对救援现场常见危险气体的监测与报警,气体报警仪采集现场可燃气体,CO,H2S,O2的浓度,并通过蓝牙信号与单兵数据采集器通信,将采集数传输给单兵数据采集器,再由单兵数据采集器通过电台传输至后场指挥中心,如图3所示。

图2 3D建模及人员轨迹
救援人员生命体征中比较重要的是人员脉搏(心率)及体温,如果人员心率及体温异常就应该及时报警并上传报警信息及体征数据,同样是通过蓝牙信号与单兵数据采集器通信,由单兵数据采集器将数据传输给后场指挥中心,如图4所示。
抬头显示仪HUD(Heads Up Display)是用于救援人员头盔处的压力(气量)显示装置。HUD的主要目的是在不影响救援人员视野的条件下,向救援人员提示空气呼吸器的剩余压力,如气量≥50%时,绿灯亮,≤10%气量<50%时黄灯亮,气量<10%时红灯亮,如图5所示。
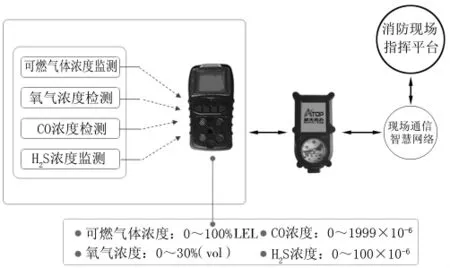
图3 环境气体监测仪及通信关系
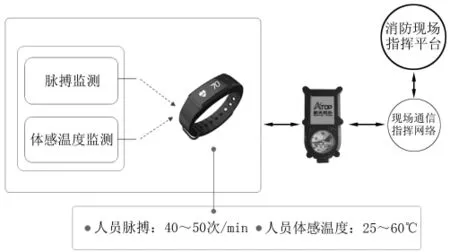
图4 生命体征监测及通信关系
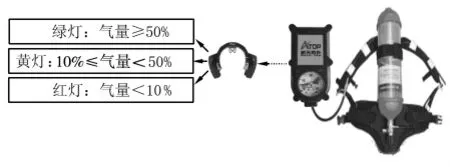
图5 气瓶压力水平显示仪及通信关系
3 结束语
通过项目研发实现一种在特殊作业现场(如应急救援现场)可以监测救援人员状态及救援现场状态的监测指挥系统,该系统由后场指挥平台、单兵数据采集系统(含空气呼吸器压力测试仪、蓝牙数据采集及WiFi数据传输功能)、具有蓝牙或ZigBee数据通信功能的单兵惯导定位传感器、具有蓝牙或ZigBee通信功能的环境气体监测仪、具有蓝牙或ZigBee通信功能的用于测量救援人员生命体征的手环、具有蓝牙或ZigBee通信功能的空气呼吸器压力水平显示仪。通过该系统可以及时反应救援人员的状态和现场环境状态,特别是能够将救援人员的位置及行动轨迹展示在后场指挥平台上,便于指挥人员了解现场情况,如救援人员出现危险状态能及时开展救助,减少救援人员在救援过程中的伤害。
