基于T-S模糊神经网络的烟道气驱建模
2018-06-23范利军刘佳佳李宪腾赵东亚李兆敏杨建平
范利军,刘佳佳,李宪腾,赵东亚,李兆敏,鹿 腾,杨建平
1.中国石油大学(华东)化学工程学院,山东青岛 266580
2.中国石油大学(华东)石油工程学院,山东青岛 266580
3.国家能源稠(重)油开采研发中心辽河油田公司,辽宁盘锦 124000
烟道气驱分为混相驱和非混相驱,本文考虑的是混相驱情况。烟道气、溶剂与稠油作用后,原油黏度减小,表面张力降低,邦德数增大,从而降低采出井中非油相组分的含量,进一步提高了原油采收率。
对于油藏注采的优化,通常采用指标对比法。即通常基于油藏数值模拟软件(CMG、VIP和Eclipse),在建立常规油藏驱油模型后,对分别给定的不同开采方案进行油藏数值模拟,然后根据定义的指标选择相对较好的开发方案。但是所有油藏数值模拟软件的本质是数学模型的集成,是大型商业公司封装好的商业产品,只能单方面进行模拟,无法结合一般的优化方法进行开源优化。而混相烟道气驱的数学模型涉及一系列的耦合偏微分方程和许多物理化学代数方程,问题复杂度高,计算复杂,难以操作。因此,本文基于CMG软件的采样数据,采用模糊神经网络的建模方法对混相烟道气驱进行数据建模,以便基于该模型进行开采方案优化,给出具体的最优开采策略。
1 模糊神经网络的建模方法
神经网络技术是一种被广泛用于非线性系统建模中的基于数据的学习训练方法。然而,在神经网络系统建模中,建模的精度和模型的泛化能力是一对广泛存在的矛盾体[1]。出现上述问题的一个重要原因是神经网络是仅仅基于数据的,缺乏经验知识的结合。而在模糊系统中,模糊集、隶属度函数、模糊规则的设计是建立在经验知识基础上的,能够避免纯客观因素带来的泛化性不足的问题[2-7]。大量文献表明,Takagi-Sugeno(T-S)模型具有诸多优异性能,比如计算简单,易于优化等[8-12]。
本文基于T-S模型的模糊神经网络,采用混合螺旋优化算法(HSO)训练网络权值以及隶属度函数的相关参数。
1.1 模糊系统的T-S模型
由于多输入多输出(MIMO)的模糊规则可分解为多个多输入单输出(MISO)模糊规则,因此下面只讨论MISO模糊系统的模型[13]。
设输入向量,x=[x1,x2,…,xn]T,式中每个分量 xi均为模糊语言变量[6,13-16]。Takagi-Sugeno 所提出的模糊规则后件是输入变量的线性组合,模糊系统的输出量为每条规则的输出量的加权平均,即[14-16]:

式中:y为模糊系统的输出量;αi为权重;yj为各规则后件的输出量;为权重平均值;m为整数。
1.2 系统结构
该网络是由前件网络和后件网络两部分组成的,前件网络用来匹配模糊规则,后件网络用来产生模糊规则[15-19]。
(1)前件网络。前件网络由四层组成。第一层为输入层,它的每一个节点直接与输入向量的各分量xi连接,其作用为将输入值x=[x1,x2,…,xn]T传送到下次层[13-19];第二层的每个节点代表一个语言变量值,如NM、PS等,其作用是计算各输入分量属于各语言变量值模糊集合的隶属函数[13-19];第三层的每个节点代表一条模糊规则,其作用是匹配模糊规则的前件,并计算出每一条规则的适应度;第四层所实现的是归一化计算。
(2)后件网络。后件网络由各结构相同的并列子网络组成,每个子网络产生一个输出量[18-19]。第一层为子网络的输入层,它将输入变量传送到第二层,其作用是提供模糊规则后件中的常数项[14-19];子网络的第二层共有m个节点,每个节点代表一条规则,该层的作用是计算每一条规则的后件;子网络的第三层是计算系统的输出。
1.3 参数学习
上述过程即为T-S模糊系统模型。本文采用混合螺旋优化算法训练模糊神经网络的权值,以及隶属度函数的参数[18-20]。
假设T-S模型中前件第二层的隶属度函数为采用高斯函数表示的铃型函数,即:

式中:cij和σij分别表示隶属函数的中心和宽度[15-19]。
对于本文中的基于T-S模型的模糊神经网络,需要学习的参数包括前件网络第二层中高斯函数的中心cij和宽度σij,后件网络第二层中的权重。
2 基于模糊神经网络的烟道气驱建模
2.1 油藏描述
油藏采用四注一采方式,即模型中包含4口注入井和1口生产井,其井位分布情况如图1所示。

图1四注一采井位示意
油藏厚5 m,长421.02 m,宽443.8 m,按x、y、z三个方向对油藏划分网格,x方向网格边长46.78 m,y方向网格边长44.38 m,总供划分为9×10网格。油藏上表面距离地表的深度为1 200 m,上层孔隙度为0.31,下层孔隙度为0.32,孔隙体积为5.9 m3。油藏初始含油饱和度为0.65,初始含水饱和度0.35,原油密度为0.95 g/cm3,地质中原油储量为3.634×105t,油藏原始压力为12 MPa,非均匀渗透。渗透率如图2所示。
440C为美国牌号,近似于我国的102Cr17Mo,是一种高碳高铬的马氏体不锈钢,其碳含量(质量分数)达到1%左右。该钢适用于制造在腐蚀环境和无润滑强氧化气氛中工作的轴承、轴套,燃油附件中的活门衬套和其他既耐磨又耐蚀的零件。由于其高碳高铬的特性,热处理后碳化物数量多,耐磨性好,耐蚀性好。在大气、水、海水中以及某些酸类和盐类的水溶液中有优良的耐蚀性。该钢由于含碳量高,生产时易出现脱碳、淬裂和残留奥氏体等问题,是较难进行热处理的钢种。

图2 绝对渗透率分布/mD
当采出井液中非油驱替相质量分数fa达到97%时,开始从4口注入井中注入烟道气,初始含水饱和度如图3所示,初始压力如图4所示。油藏中烟道气的初始体积分数为0。油藏数据及流体数据分别见表1和表2。注入方式采用三段塞,4口注入井的注入量Qin均为15 m3/d,生产井产液量Qout为60 m3/d[20]。采用CMG软件(2010版本)进行数值模拟,得到样本数据。

图3 初始含水饱和度分布
2.2 段塞注入策略
对烟道气驱模型,系统输入为注入井的烟道气注入速度,这里只考虑注入速度变化,假设注入压力、段塞固定,驱替时间固定;系统的输出为采出井的非油相组分质量分数fa,为了方便,由非油相组分求得采油量。烟道气的注入采用段塞形式,注入速度可按下式表示:


图4 初始压力分布/MPa

表1 油藏参数

表2 流体数据
式中:v(t)为注入速度,m3/d;v(wk)为第w口注入井在第k个段塞长度内注入驱替液中烟道气的注入速度,m3/d;t为段塞时长,月;k为段塞数;P为最大段塞数;tp、tf分别表示注入速度为零的段塞上、下限。
为了建立烟道气驱的辨识模型,基于油藏数值模拟软件CMG进行了油藏数值模拟,得到注入井烟道气注入速度v与采出井非油相组分质量分数fa间的曲线关系样本数据,而后用于基于HSO和T-S模型的模糊神经网络的建模。
2.3 建模过程
采用三段塞注入策略,注采方案为先水驱后烟道气驱。在2005年12月31日至2013年12月31日时间段内,按月采样数据,共取97个时间点,烟道气和溶剂的注入时间为2006年10月1日至2010年9月1日。注入烟道气段塞的时间节点分别为10~21月、22~50月、51~56月,具体注入方式如图5所示。
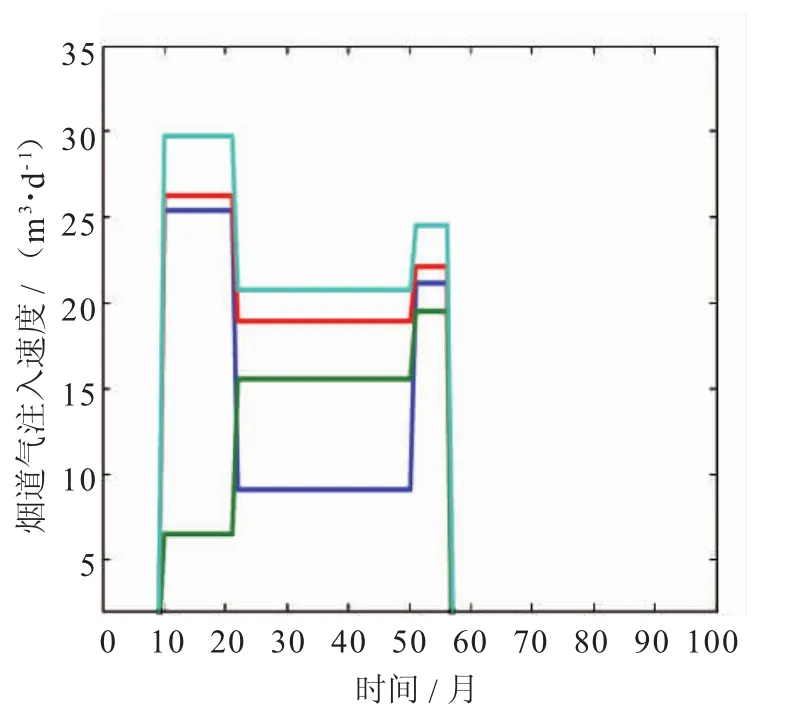
图5 三段塞划分
为了使建模更具说服力,在烟道气注入速度v∈[5,30](m3/d) 范围内随机生成100组注入策略,分别运用到CMG建模的上述的油藏区块进行数值模拟,得到与100组注入策略相应的采出井非油相组分质量分数fa,即得到了100组输入、输出样本数据。

采用基于HSO和T-S模型的模糊神经网络进行训练建模,从而建立了烟道气驱油藏的辨识模型,得到注入井烟道气注入速度和采出井非油组分质量分数之间的关系,其数学描述如下:

式中:Ψ(v)为复杂的非线性函数,代表模糊神经网络训练的结果。
由于把100组建模数据画在一个图中无法清晰显示,因此,从100组非油相组分质量分数fa中选取9组,对建模的效果进行测试。选取的9组输入(注入井的烟道气注入速度v)如表3所示。
注采策略的建模输出(模糊神经网络模型的计算结果)与实际输出(CMG模型的模拟计算结果)都十分接近,对于整个驱油时间段,建模误差均小于2.2%,且绝大部分误差都小于1%,见图6~7。因此,本文提出的基于HSO和T-S模型的模糊神经网络,可建立准确的烟道气驱模型。
为了测试模型的泛化能力,在[5,30](m3/d)范围内随机选取一组注入策略,分别代入CMG软件和建立的模型中,得到模型输出。若选取4口注入井的烟道气注入速度为{(30,20,12),(25,15,10),(25,15,10),(20,10,6),(10,12,19)}m3/d,则其相应的测试输出曲线如图8所示,测试输出误差曲线如图9所示。
从图8~9中可以发现,模型的输出基本和实际值相吻合。定义如下指标为模型输出与实际值的相对误差的均值st:

表3 烟道气注入策略/(m3·d-1)

图6 9种策略的模糊神经网络建模输出结果和实际值

图7 9种策略的建模计算误差

式中:fai表示模型输出采出井非油组分质量分数,%;表示实际采出井非油组分质量分数,%;i表示模型计算次数;N表示模型计算最大次数。
通过计算可知,平均相对误差st=0.011 3%,其中含水率的单位为%,相对误差绝对值的最大值为1.14%,模型输出与真实值的差值的方差为0.125。从上述数据可知,该模型的泛化能力较好,与实际值十分接近。
综上所述,基于HSO和T-S模型的模糊神经网络建模方法可有效地用于烟道气驱油藏的建模,它具有较高的精度和可靠性。
3 结束语

图8 模型测试输出结果

图9 模型的测试误差
本文结合神经网络、模糊系统和智能算法提出了一种基于HSO和T-S模型的模糊神经网络建模方法。本方法绕过了烟道气驱的机理模型,避免了复杂的渗流方程和能量方程的计算,避免了带耦合的高阶偏微分方程组的计算,简化了烟道气驱的模型,减小了对于先验知识的依赖性。数值仿真计算验证了该建模方法在建立烟道气驱模型上的准确性和可靠性。
[1]刘毅娟,雷鸣,何旸,等.人工神经网络概述[J].电子测试,2015(6):74-75.
[2]RAO S S,CHEN L.Numericalsolution of fuzzy linear equations in engineering analysis[J].International Journal for Numerical Methods in Engineering,2015,43(3):391-408.
[3]TALAEI M,MOGHADDAM B F,PISHVAEE M S,et al.A robust fuzzy optimization model for carbon-efficient closed-loop supply chain network design problem:a numerical illustration in electronics industry [J].Journal of Cleaner Production,2015,113:662-673.
[4]YAGHOOBI A,BAKHSHI-JOOYBARI M,GORJI A,et al.Application of adaptive neuro fuzzy inference system and genetic algorithm for pressure path optimization in sheet hydroforming process[J].International Journal of Advanced Manufacturing Technology,2016:1-11.
[5]DENG Y,REN Z,KONG Y,et al.Ahierarchicalfused fuzzy deep neural network for data classification[J].IEEE Transactions on Fuzzy Systems,2016:1-1.
[6]张芳.基于改进GA的模糊神经网络参数学习算法及其应用的研究[D].长沙:中南大学,2007.
[7]唐海燕.基于模糊神经网络的电梯群优化控制研究[D].哈尔滨:哈尔滨工业大学,2006.
[8]刘骏,殷晓明,顾幸生.一种改进的T-S模糊模型建模及优化方法[J].华东理工大学学报(自然科学版),2016,42(2):233-239.
[9]张健.模糊神经网络模型算法研究与应用[D].大庆:大庆石油学院,2002.
[10]孙海蓉.模糊神经网络的研究及其应用[D].保定:华北电力大学(河北),2006.
[11]何春梅.模糊神经网络的性能及其学习算法研究[D].南京:南京理工大学,2010.
[12]周琛晖.模糊神经网络稳定性分析及其应用[D].成都:电子科技大学,2013.
[13]张妍妍.连续搅拌反应釜的智能控制器设计[D].郑州:郑州大学,2007.
[14]李国勇.智能预测控制及其MATLAB实现 [M].第2版.北京:电子工业出版社,2010.
[15]刘坤.电液伺服系统的智能控制研究 [D].秦皇岛:燕山大学,2003.
[16]杨勇.EMD和模糊神经网络在滚动轴承故障诊断中的研究与应用[D].太原:太原理工大学,2008.
[17]秦晓娜.基于T-S模糊神经网络的CFB-FGD过程脱硫效率的预报研究[D].沈阳:东北大学,2009.
[18]毕作文.模糊神经网络在CASS工艺污水处理系统中的研究与应用[D].兰州:兰州理工大学,2011.
[19]郝敏.基于模糊聚类算法的自适应模糊神经网络研究[D].哈尔滨:哈尔滨理工大学,2007.
[20]雷阳.高温高盐油藏聚合物驱最优控制方法研究[D].青岛:中国石油大学(华东),2013.
