AOD炉炉衬风口侵蚀识别方法的研究
2018-06-20郭红涛刘明硕
邱 东,郭红涛,刘明硕
(长春工业大学 电气与电子工程学院,吉林 长春 130012)
0 引 言
AOD炉铁合金冶炼是一个非常复杂的多元、多相、高温的物理化学反应过程,多种反应过程形成了对炉衬寿命影响的因素,其中主要因素有[1-2]:高温铁水对炉衬的冲刷(铁水冶炼温度达到1 500~1 800摄氏度);炉气、炉渣对炉衬的冲刷;炉渣、炉气与炉衬材质反应形成的化学腐蚀;骤冷骤热对炉衬的影响;高压氧、氮气流对炉衬的冲刷。冶炼过程中产生的无法再次利用的废铁、废气会对环境造成较大的污染。因此,建立AOD炉炉衬检测系统对延长炉役,增加炉衬寿命,减少环境污染,提高冶金工艺,节约炼钢成本,提高企业生产竞争力具有重大意义。
AOD炉炉衬侵蚀严重部分主要有顶枪风口区域、渣线区域、底枪供气区域这3大部分,文中取顶枪风口区域部分作为研究对象,对该区域侵蚀面积进行检测。
1 系统方案
为了研究基于图像识别技术的炉衬面积侵蚀(由于AOD炉冶炼钢铁的特性,整个炉衬的各个部分都存在侵蚀问题,文中研究的内容是炉衬的风口部分)识别技术的可行性,搭建了炉衬侵蚀面积检测实验系统。系统结构如图1所示。首先,将待检测的炉衬样品材料置于检测位置,采用高精度相机对材料进行拍摄,完成图像采集,将采集到的图像传输到处理器。
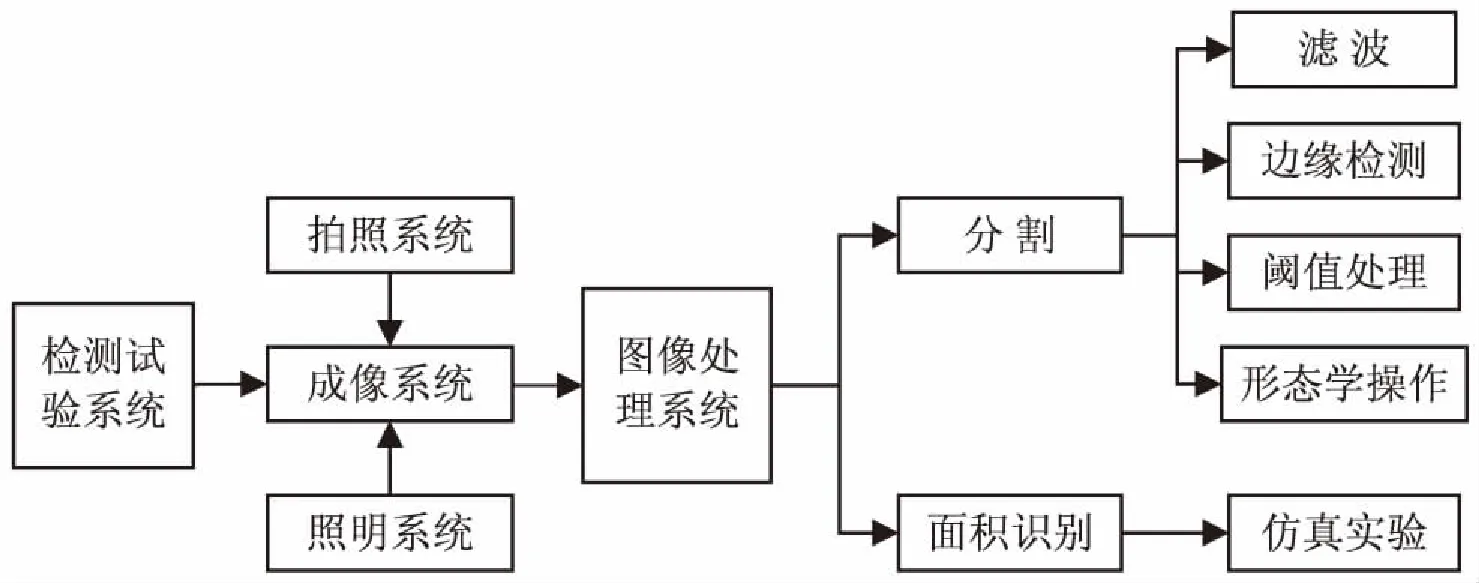
图1 系统框图
2 图像预处理及分析
在实际应用中,由于拍摄条件及环境方面的限制,炉衬侵蚀图像会存在对比度低、照明不均匀等问题,对侵蚀面积的检测具有较大影响。因此,需要对图像进行预处理。炉衬面积图像处理过程:首先,将相机中的图像读入到系统中并且对图像进行预处理;其次,针对图像进行阈值分割和缺陷提取,对于不同类型的缺陷,设计相应的阈值分割和提取算法;最后,根据提取的图形计算缺陷区域的面积。具体流程如图2所示。
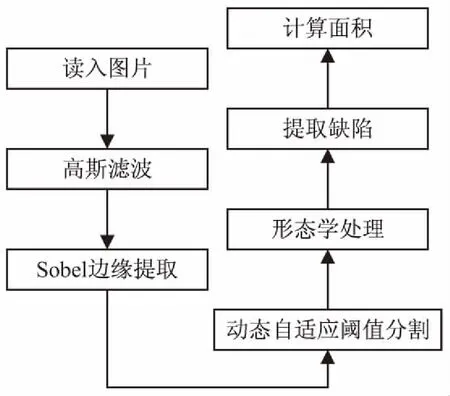
图2 图像处理流程
2.1 图像滤波
图像滤波是常用的数字图像处理技术之一,其应用的主要目的是消除或减少噪声对图像的干扰,改善图像质量。图像滤波可以在空间域、频率域内进行。在空间域内,多数应用邻域平均的方法来降低噪声的影响,而在频率域中,噪声频谱一般多在高频段,故可以用低通滤波器来实现噪声的滤除。与其他线性滤波方法相比,高斯滤波具有五个非常重要的性质[3-4],滤波器在各个方向上滤波的平滑程度是相同的,采用像素邻域的加权均值来替代该点的像素值。而在图像拍摄采集中噪声源产生的干扰多是高斯分布形式的噪声,故选用高斯滤波进行图像的滤波处理。
2.2 Sobel边缘提取
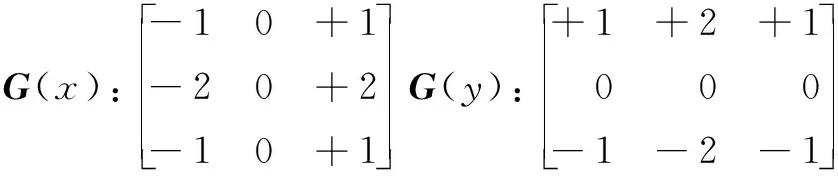
为了获取图像的边缘信息,需要对图像进行边缘检测。检测过程中,在侵蚀图像边缘处,图像的数据具有不连续性,灰度值会突然发生较大变化,而边缘检测可以在提取出图像边缘信息的同时去掉图像的内部信息,极大地减少了图像的数据量。Sobel边缘检测是一种离散性差分检测方法,它的特点是方法简单,处理速度快,获取的边缘光滑、连续。因此,文中应用Sobel边缘检测法提取侵蚀轮廓,以显示有缺陷位置的轮廓[5-7]。Sobel检测是一种一阶导数的边缘检测算法,在应用处理过程中,选取3×3模板作为核与图像中的各个像素点做卷积和运算,在运算处理完结后选取适当的阈值提取边缘。
Sobel卷积模板如下:
G(x)=[f(i+1,j-1)+2f(i+1,j)+
f(i+1,j+1)]-[f(i-1,j-1)+
2f(i-1,j)+f(i-1,j+1)]
(1)
G(y)=[f(i-1,j+1)+2f(i,j+1)+
f(i+1,j+1)]-[f(i-1,j-1)+
2f(i,j-1)+f(i+1,j-1)]
(2)
其中,G(x)、G(y)分别是图像函数f(i,j)在点(i,j)处的梯度。
为了进一步增强图像的细节信息、边缘特征,需对垂直方向和水平方向的梯度进行融合,公式如下:
|G|=0.5|G(x)|+0.5|G(y)|
(3)
其中,|G|为融合后的梯度。
梯度图如图3所示。
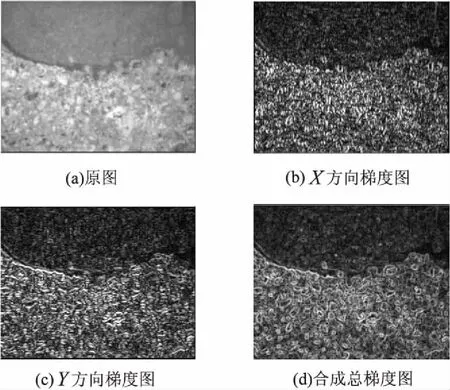
图3 梯度图
2.3 阈值分割及形态学处理
阈值分割[8]在整个图像处理过程中非常关键。适当的分割方法能够从图像中获得准确的目标区域,为后续处理带来方便。常用的阈值处理算法有直方图阈值分割[9-11]、最小错误概率阈值法[12]、最大类间方差阈值法[13-14]等。由于炉衬检测环境的复杂性,照明补偿的不平均性,及材质分布的随机性,一般常用的分割方法无法满足分割需求,因此文中采用基于中值滤波的局部动态阈值分割算法(又名局部自适应分割法)。与一些典型的阈值分割方法相比,该方法具有明显的不同。动态阈值分割不需要给定某些固定的阈值,其分割准则是相对的灰度差值。像素的灰度高于或低于其背景平均灰度一定程度,则该像素被算法选中。假设图像函数用f(i,j)表示,中值平均后得到的背景图像函数用g(i,j)表示,那么对灰度较高部分的分割算法可表示为:
s={f(i,j)-g(i,j)≥gdiff|(i,j)∈R}
(4)
同理,对于灰度较低部分的分割算法可表示为:
s={f(i,j)-g(i,j)≤-gdiff|(i,j)∈R}
(5)
在数学形态学应用处理中,结构元素是整个算法实现中最重要、最基本的概念,它的作用类似于信号处理当中的滤波窗口。
用B(x)代表结构元素,对工作空间E中的每一点x,腐蚀和膨胀的定义为:
X=E⊙B={x:B(x)⊂E}
(6)
Y=E⊕B={y:B(y)∩E≠∅}
(7)
用B(x)对E进行腐蚀,所得到的结果就是把结构元素B平移后使B包含于E的所有点构成的集合。用B(x)对E进行膨胀,获得的结果就是把结构元素B平移后使B与E的交集非空的点构成的集合。先膨胀后腐蚀的处理过程称为闭运算,具有填充物体内细小空洞,连接邻近物体和平滑边界的作用。分割处理图像如图4所示。
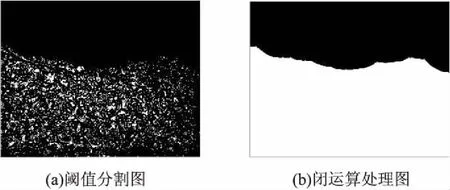
图4 分割处理图
3 面积识别
3.1 图像的矩
矩是概率与统计的一个概念,是随机变量的一种数字特征。设x,c均为随机变量,k为正整数,那么E[x-c]称为x关于c点的k阶矩。
当c=0时,ak=E(Xk)称为k阶原点矩。
当c=E(X)时,uk=E[(X-EX)k]称为x的k阶中心矩。
对于一幅图像,可以把图像的像素坐标看成为一个二维随机变量(X,Y),那么一幅灰度图像就可以用二维灰度密度函数表示,所以也就可以用矩来描述灰度图像的特征。
从一幅数字图像中计算得到的矩集,一般描述了该图像的全局特征,并且提供了大量的与该图像有关的不同类型的几何特性信息,如大小、位置及形状等。
3.2 Hu矩
一幅M×N的数字图像f(i,j),其阶几何矩mpq和中心矩μpq为:
(8)
(9)

一阶矩与形状有关,二阶矩显示曲线围绕直线平均值的扩展程度,三阶矩则是关于平均值的对称性测量。
在OpenCV中,一般由moments、contourArea函数配合求取图像的矩[15]。
(1)使用moments来计算图像所有的矩(最高到3阶)。
(2)使用contourArea来计算轮廓面积。
3.3 实验结果
AOD炉炉衬材料由高温耐火砖铺砌而成,实验仿真材料取自于现场炉衬大修废弃的耐火砖样品,砖面的损毁面积具有不规则与随机性。实验题材的大小为230 mm×150 mm,230 mm×150 mm×110 mm,直形砖和楔形砖两种规格(直形砖:3组,楔形砖:2组)。实验器材:高性能电脑一台,带支架的实验平台一个,EM1400C高清工业CCD相机一台,同轴光源一个,固定装置两个。软件开发系统:VS2013、OpenCV。由于实验平台尺寸为40 cm×30 cm,设置图像宽度为320像素,高度为240像素,所以图像分辨率为8像素/cm,每个像素代表的真实面积为1/64 cm2。
实验中,图像分割与数学形态学闭运算在图像处理中均存在误差变化,在闭运算中迭代值取值不同,得到的处理图像面积会有较小的变化,当迭代值取到一定量的数值时,图像的面积变化比较微小,基本保持不变。迭代值下限对应的像素面积是运算得到的相对完整的轮廓图形面积,迭代值上限对应的像素面积是运算得到的最佳的轮廓面积,比较获得整个运算处理过程中像素面积的误差值。实验数据如表1所示。

表1 图像面积与误差
4 结束语
提出了一种基于图像识别技术的炉衬风口侵蚀面积识别方法。利用高精度的拍摄系统对炉衬样品进行图像采集,然后采用滤波、边缘检测、图像分割等技术对拍摄到的图片进行处理,获取图像特征,最终实现对侵蚀面积的识别。由于图像检测边缘的模糊性和闭运算结构元素选择的局限性,图像处理存在一定范围内的误差,有待于进一步改善。炉衬风口侵蚀面积检测为以后研究炉衬侵蚀面积与侵蚀程度(深度)数据库研究提供了理论依据。
参考文献:
[1] 张 毅,伍从应,王琳松,等.100t转炉炉衬侵蚀因素的分析和长寿炉龄的工艺实践[J].特殊钢,2015,36(4):23-27.
[2] 史江涛,蒋仁全,马跃庆.延长高碳铬铁电炉炉衬寿命的实践[J].铁合金,2003,34(4):28-31.
[3] GONZALEZ R C,WOODS R E.Digital image processing[M].3rd ed.Beijing:Electronic Industry Press,2011.
[4] 包晓敏,张云华,汪亚明,等.基于离散高斯滤波器的纺织品图像增强[J].纺织学报,2005,26(4):121-123.
[5] 魏伟波,芮筱亭.图像边缘检测方法研究[J].计算机工程与应用,2006,42(30):88-91.
[6] 周心明,兰 赛,徐 燕.图像处理中几种边缘检测算法的比较[J].现代电力,2000,17(3):65-69.
[7] 靳鹏飞.一种改进的Sobel图像边缘检测算法[J].应用光学,2008,29(4):625-628.
[8] NIXON M,AGUADO A S.Feature extraction and image processing[M].[s.l.]:Academic Press,2008.
[9] 陈 亮,丁国辉,郭 雷.基于直方图互确认的图像阈值化分割[J].红外与毫米波学报,2011,30(1):80-84.
[10] KAPUR J N,SAHOO P K,WONG A K C.A new method for gray-level picture thresholding using the entropy of the histogram[J].Computer Vision,Graphics & Image Processing,1985,29(3):273-285.
[11] WANG Qing,CHI Zheru,ZHAO Rongchun.Image thresholding by maximizing the index of nonfuzziness of the 2-D grayscale histogram[J].Computer Vision & Image Understanding,2002,85(2):100-116.
[12] 朱齐丹,荆丽秋,毕荣生,等.最小误差阈值分割法的改进算法[J].光电工程,2010,37(7):107-113.
[13] 贺建峰,符 增,相 艳,等.基于灰度空间相关性最大类间方差的图像分割[J].计算机工程,2015,41(11):280-286.
[14] 景晓军,李剑峰,刘郁林.一种基于三维最大类间方差的图像分割算法[J].电子学报,2003,31(9):1281-1285.
[15] 毛星云,冷雪飞.OpenCV3编程入门[M].北京:电子工业出版社,2015:327-333.
