可倾斜式贝类预煮装置结构设计及流场分析
2018-06-19张鹏,张旭,王慧慧,陶学恒
张 鹏, 张 旭, 王 慧 慧, 陶 学 恒
( 大连工业大学 机械工程与自动化学院, 辽宁 大连 116034 )
0 引 言
我国贝类产品加工大多数是以人工为主,加工水平处于比较初级的阶段。贝类海产品加工方式以资源开发型和劳动密集型为主,加工技术、机械化生产水平较低[1]。
在贝类加工过程,尤其是在预处理过程中,设备的普及率还比较低,主要靠人工或简单的辅助工具,设备主要应用于单机设备,成套设备比较少,并且很多都是应用食品加工通用装备,贝类海产品加工专用设备缺乏。由于贝类的种类繁多,形状和大小各不相同,加工特性存在较大差异,这导致设备的通用性差,加工精度无法保证。
针对贝类预煮加工存在的问题,本实验设计了新型贝类海产品预煮加工装置,加工贝类海产品罐头类的预煮工艺,集上料、预煮与下料于一体,实现了装置的自动化,有效地减少了人力的使用,提高了生产效率。
1 贝类预煮装置整体结构设计
1.1 预煮装置基本结构
可倾斜式贝类海产品预煮加工装置的整体的总布局如图1所示。可倾斜式贝类海产品预煮加工装置包括三部分,分别是预煮装置、上料装置和下料装置。其中,预煮装置是此方案中的核心部分。图2为预煮装置的三维建模图,预煮装置包括升降装置、搅拌装置、翻转装置和底座。
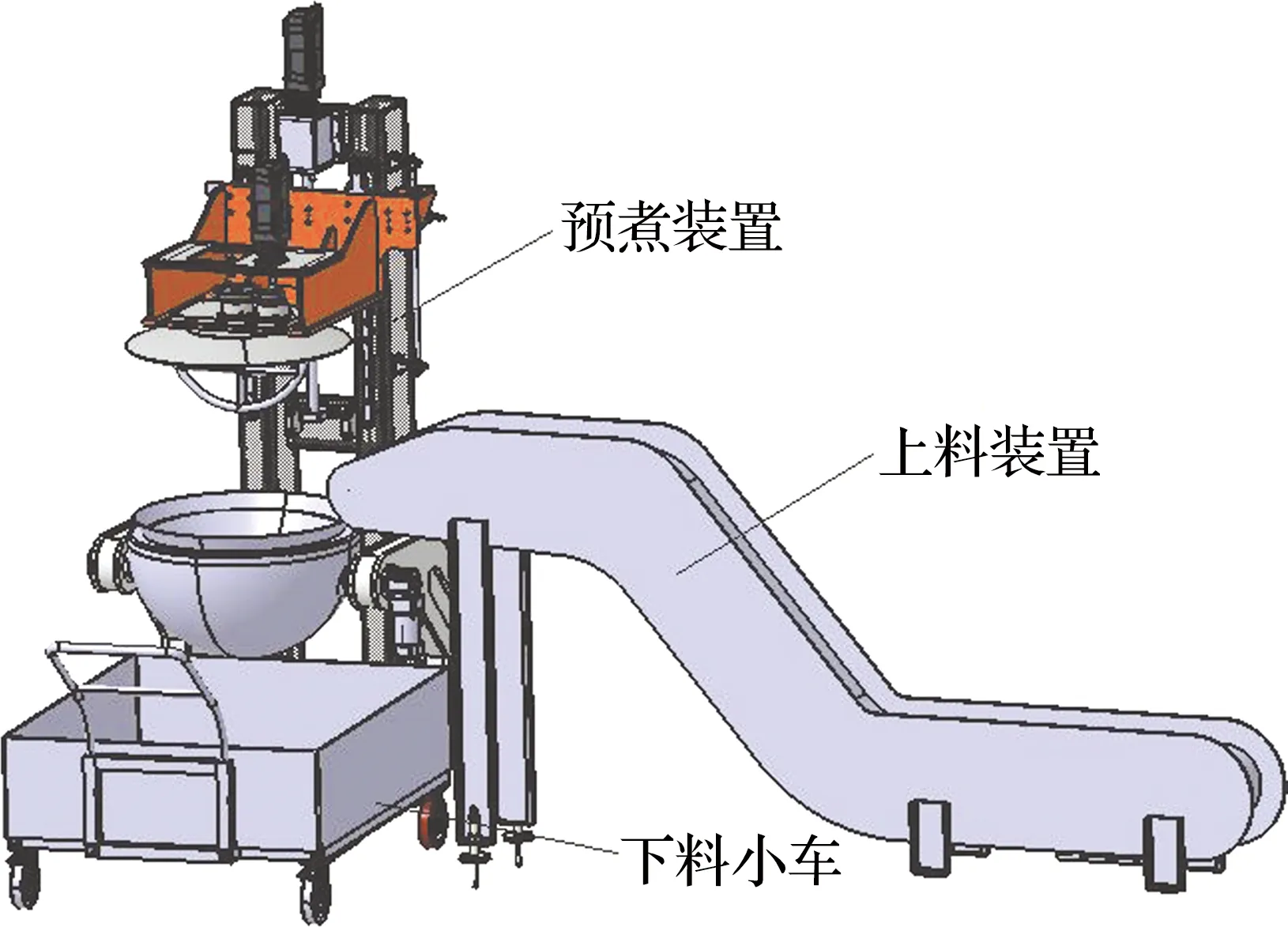
图1 可倾斜式贝类海产品预煮加工装置整体布局图
Fig.1 Layout of the tiltable shellfish precooking processing machine

图2 预煮装置的三维建模图
1.2 预煮装置工作原理
在进行物料上料前,预煮装置中升降装置上升到极限位置,此时搅拌装置即锅盖连同搅拌器在滚珠丝杠的作用下离开预煮锅体,为上料做好准备。此升降装置原理与升降式贝类海产品预煮加工装置中的升降装置相同;进行上料,在上料装置的输送下,完成贝类海产品的上料;上料完成,升降机构返回原工位,完成预煮锅体上盖。在电机的作用下,搅拌器开始工作,进行预煮加工;预煮完成后,在翻转装置的作用下,预煮锅体自动倾斜倒料至下料小车中,完成预煮;根据加工工艺,实现梯式升温自动控制,升温速度≤1 ℃/min,保温温度(-2~2) ℃,处理批量100 kg/h。
可倾斜式贝类海产品预煮加工装置具体的工艺流程:(1)预煮装置完成预煮锅体下盖,即升降装置通过电机带动滚珠丝杠将锅盖连同搅拌器上升到指定位置。(2)上料装置准备好的物料输送到预煮锅内。待上料完成后,升降装置下降到初始位置,返回原工位,即预煮锅体上盖,搅拌器在电机的带动下正反转进行预煮搅拌。根据贝类预煮温控特性曲线,按规定时间内完成预煮。(3)预煮结束,升降装置继续上升到指定工位。此时,预煮锅自动倾斜下料至小车中。
以此类推,预煮结束后,继续上料,重复相同的工位。
2 预煮装置主要部件结构设计
2.1 升降装置
该升降装置的基本结构如图3所示。电机通过联轴器连接滚珠丝杠,连同直线导轨安装在立柱上。搅拌装置通过滚珠丝杠和直线导轨安装在支柱上,滚珠丝杠的旋转运动转化成搅拌机构的上下垂直直线运动,完成预煮锅体的上下盖。
2.2 搅拌装置
搅拌装置的三维模型如图4所示。其工作原理与升降式贝类海产品预煮加工装置原理相同。整个搅拌装置通过支架固定在升降机构上,电动机固定在支架上,通过齿轮传动连接搅拌器。锅盖通过盖板与支架等连接在一起。上料前和预煮后,搅拌装置在滚珠丝杠的带动下,实现垂直方向工位的转换。
由于预煮搅拌对象是食用贝类去壳海产品,需要尽量保持预煮对象的完整、美观,所以搅拌器不同于常用的搅拌器形状,搅拌装置中的搅拌器形状为圆形十字交叉,属于新型搅拌器,其形状与预煮锅形相匹配,以保证预煮物料的均匀搅拌及同时熟化,避免糊化现象的产生。

1.电机; 2.联轴器; 3.滚珠丝杠; 4.直线导轨; 5.立柱

1.电机; 2.支架; 3.齿轮; 4.轴承; 5.盖板; 6.锅盖; 7.搅拌器
2.3 翻转装置
翻转装置的三维模型如图5所示。预煮锅体通过轴承、转轴安装在支架上。该机构中的电机选用的是减速电动机。减速电机具有节省空间和能量、耐用性强、性能优越、振动小、噪音低、节能高的特点,并且经过精密加工,可以保证轴平行度和定位精度[2-3]。
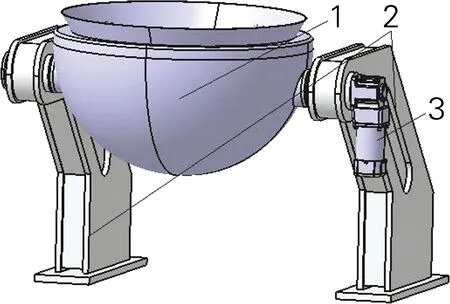
1.预煮锅体; 2.支架; 3.减速电机
预煮锅体采用的是不规则夹层锅,该夹层锅可以用蒸汽加热。蒸汽夹层锅具备受热面积大、热效率高、加热均匀、液料沸腾时间短、加热温度容易控制、安全可靠等优点[4]。
夹层锅形状为不规则球形,单从结构上来看,夹层锅分为内胆和外胆。传统的夹层锅内胆和外胆都是采用半球形状,整个锅体是双层结构形式。本方案中的内胆并非是规则的半球体,而是锅口与竖直方向成一定的角度,这样的设计有利用预煮锅体翻转时,能够较为快速地进行下料。
3 搅拌装置流场数值模拟
3.1 数值模拟分析的计算对象
研究对象是去掉贝壳的鲍鱼产品,即鲍鱼-水两相,设置第一相为水,第二相为鲍鱼。固-液两相悬浮搅拌时,根据固相颗粒的几何特性,当固相颗粒形状不规则时,通常定义一个等容颗粒作为颗粒大小的度量,固体颗粒的直径取与体积相等的球体直径[5]。根据该原理,固相颗粒鲍鱼的平均直径是36 mm,体积是25 mm3,固相密度是1.188 g/cm3。由工艺要点可知,预煮时加水量为鲍鱼肉的2倍[6],所以固相的体积分数比是33%。
3.2 分析求解参数的设定
搅拌器数值计算软件是ANSYS Workbench 15.0,混合器内混合物流体流动模型,采用Euler-Eulerian模型。考虑到两种液体密度差的情况,在模拟时要考虑重力的作用,建立封闭流场[7]。由于流场的计算方法采用的是滑移网格法,所以在动区域和静区域,即相邻两区域的重合面分别设置interface,以便节点信息通过插值函数传递。模型中的静态固体壁被定义为一个非滑移壁边界,这意味着在固壁附近的黏性流体速度为0。设置动子域为Moving,并且对角速度进行定义,并设置旋转面与所在子域共同转动,即相对速度设为0。采用湍流模型(修正RNGk-ε模型)。选用三维单精度模型,在求解器方面选择分离式;压力与速度场之间选用SIMPLEC算法处理[8];计算体积分数方程选用QUICK格式;压力计算时,选用标准格式;差分格式的设置,选用二阶迎风格式。
3.3 固-液两相流场体积分数的分析
搅拌器的旋转速度分别设置15、25、35 r/min[9],对预煮锅体进行搅拌流场分析。获得搅拌器在搅拌过程当中的固、液两相体积分数分布规律以及速度场,以物料同时熟化和避免糊化现象为前提,选择最佳搅拌器旋转速度。
从固相体积分数曲线变化可以看出,搅拌器的旋转速度为15 r/min时,预煮锅底固相体积分数较大,产生了颗粒堆积,分布不均匀,不能够进行均匀受热,容易产生糊化现象,不利于预煮搅拌。搅拌器的旋转速度过高,达到25和35 r/min时,预煮锅体底部固相体积分数都很小,改善了之前的固体颗粒体积堆积的情况;搅拌速度过高时,预煮锅体的内壁与搅拌器外侧之间固相颗粒的体积分数较大,不利于预煮过程中物料的均匀受热。所以,从相的分布角度看来,搅拌速度为25 r/min最佳。

图6 不同旋转速度下固相的体积分数
图7为距离预煮锅体底部不同高度的水平面的固相颗粒的流场分布图。当搅拌器旋转速度设置25 r/min时,随着模拟时间逐渐增大,固-液两相搅拌流场更趋于均匀化。从图中呈现的云图来看,整个预煮锅体内的搅拌很均匀,预煮锅体底部没有产生固体颗粒的堆积,能达到稳态。

图7 不同高度的水平面固相颗粒的流场分布
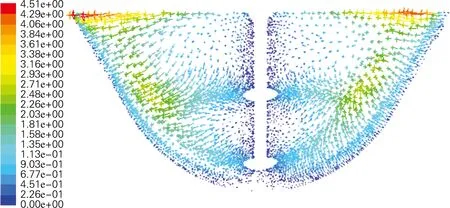
3.4 固-液两相流场速度场的分析
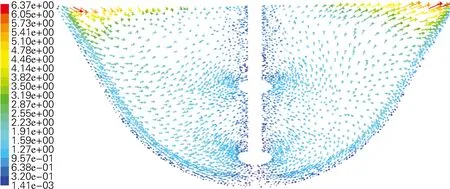
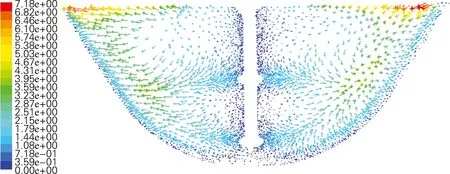
通过观察速度矢量图,可以得到速度的方向、大小和分布规律等,便于对流场进行分析[10]。图8和图9中分别给出了搅拌桨在15、25和35 r/min不同转速下,固体颗粒在径向截面Y=-0.2和轴向截面X=0的速度矢量图。

(a) v=15 r/min
(b)v=25 r/min

(c)v=35 r/min
图8 不同旋转速度下平面Y=-0.2的固相速度矢量图
Fig.8 Velocity vector diagrams of solid phase whenY=-0.2 at different rotating speeds
由图8看出,预煮锅体内径向截面的流体速度方向与搅拌器的转动方向相同。流体围绕搅拌器形成环流,促进了旋涡的产生,漩涡内流体沿逆时针方向流动。因为漩涡的出现,流体之间可以传递强烈的动量和质量,从而促进了流体的搅拌混合。
流动速度的大小在整个径向截面上并不相同。搅拌叶附近的速度最大,并且随着搅拌速度的提高,流动速度也在不断变大。搅拌轴和预煮锅体壁面处的速度较小,原因有两个:一是在锅壁面,实际流体存在边界层;二是在搅拌器的推动作用下,搅拌叶附近流体获得的动能比较高,而远离叶片的流体获得的能量比较少,速度就比较小。
(a) v=15 r/min
(b)v=25 r/min
(c)v=35 r/min
图9 不同旋转速度下X=0的速度矢量图
Fig.9 Velocity vector graphs ofX=0 at different rotating speeds
由图9可以看出,轴向上的速度矢量分布是对称的。在相同的旋转速度下,分别形成了不同强度的紊流区域。搅拌器的速度为15 r/min时,整体速度都很低,产生聚集现象,说明固相颗粒有堆积现象,没有均匀混合,紊流强度很弱;搅拌器旋转速度是25 r/min时,形成的紊流环较为明显均匀,整个固体颗粒的分布也很均匀;当搅拌器的旋转速度达到35 r/min时,在搅拌器的带动下,产生速度差,搅拌叶的附近速度很高,容易发生分层的现象,导致整个混合不均匀。
从速度场模拟的结果可知,设计的搅拌器形状可形成很好的轴向的紊流循环,并且在一定的参数范围内,搅拌器的旋转速度越大,流体平均速度越大。对于预煮搅拌而言,选取适中的速度为最佳,有利于物料的均匀搅拌,可以有效地避免糊化现象的产生。
4 结 论
我国海产品资源丰富,其中贝类海产品约占85%,所以贝类海产品的加工有着广阔的发展前景。可倾斜式贝类预煮装置是结合先进加工工艺提出的新型贝类海产品预煮加工装置。通过对贝类海产品预煮加工装置进行搅拌流场分析,分析固相、液相的流场分布情况以及速度场以保证物料的均匀搅拌、同时熟化和避免糊化现象,确定25 r/min为最佳的旋转速度。在搅拌器的旋转速度达到25 r/min时,预煮加工装置在预煮过中均可以形成紊流,物料处于悬浮状态,可以被均匀搅拌,有利于物料同时熟化,避免糊化现象的产生。样机试制在相关企业应用示范,比现有产品成品率提高10%,营养素流失率减少20%。
[1] 徐文其,沈建.中国贝类前处理加工技术研究进展[J].南方水产科学,2013,9(2):76-80.
[2] 俞洪飞.一种新型齿轮减速电机的结构设计[J].工业技术创新,2016,3(5):882-884.
[3] 石建丽.减速电机模块化设计[J].电机技术,2012(5):33-34.
[4] 李本均.不锈钢夹层锅焊缝开裂原因分析及解决措施[J].应用能源技术,2006(5):33-34.
[5] 岳湘安.液-固两相流基础[M].北京:石油工业出版社,1996.
[6] 邓丽,李岩,董秀萍,等.热加工过程中鲍鱼腹足蛋白间作用力及其质构特性[J].农业工程学报,2014,30(18):307-316.
[7] 胡效东,田强,戚振,等.基于滑移网格的反应釜内部流体动力学特性研究[J].压力容器,2013,30(7):30-38.
[8] 雷晶.基于FLUENT软件搅拌器的流体模拟[J].油气田地面工程,2010,29(8):25-26.
[9] 刘晓杰,王维坚.食品加工机械与设备[M].北京:高等教育出版社,2010.
[10] 李志杰,张召,杨小光,等.KR法脱硫搅拌转速对流场影响的数值分析[J].山东冶金,2016,38(1):27-30.
