机器学习辅助IMU人体跌倒状态识别
2018-06-15,
,
(上海海事大学 信息工程学院 电子系,上海 201306)
引 言
当今社会人口的老龄化越来越明显,根据调查研究显示,老年人有着较高的摔倒率,摔倒后很多老人由于没有及时求救,错过最佳救治时期导致的瘫痪甚至死亡的案例不在少数,识别摔倒状态成为新的研究热点,通过科学的手段及时检测出摔倒并及时求救,对老年人的健康有着至关重要的作用。
目前,研究开发跌倒检测系统方面的技术有很多种,主要可分为3类[1]:①基于视频图像分析的跌倒检测系统[2]。通过利用图像处理对监控视频中的前景目标进行识别判断人体跌倒情况。但是监控只能针对有安装摄像头的地方,并且有可能会牵扯到个人隐私问题。②基于声学的跌倒检测系统[3-5],利用跌倒时突然造成的加速度产生一定的频率而进行检测,这类方法无法获得很好的精度,同时资金投入较大,一般为其它识别方法的辅助手段。③基于加速度传感器的跌倒检测系统。该类系统通过佩戴加速度传感器模块,当人体跌倒时产生的加速度达到一定阈值,就将其判定为摔倒,此系统不受环境和运动状态的限制,更适合对人体跌倒状态的识别和检测。从诸多参考文献上看,该系统采用单一或多个传感模块或者复杂的算法以达到准确判断的目的,导致实时性较差[6-7]。
本文着力于老年人跌倒的识别研究,从日常活动中识别出跌倒状态。本文提出一种基于6轴传感器的跌倒检测系统,通过对人体运动的加速度和角度变化来分析跌倒事件是否发生,实验验证该系统非常有效。
1 系统组成
本文所采用的人体跌倒状态识别系统主要由3轴MEMS陀螺仪、3轴MEMS加速度计、微处理器、蓝牙传感器模块、个人电脑(Person Computer, PC)组成。MPU6050采用16位的数模传感器对采集的数据进行模/数转换。系统结构图如图1所示。
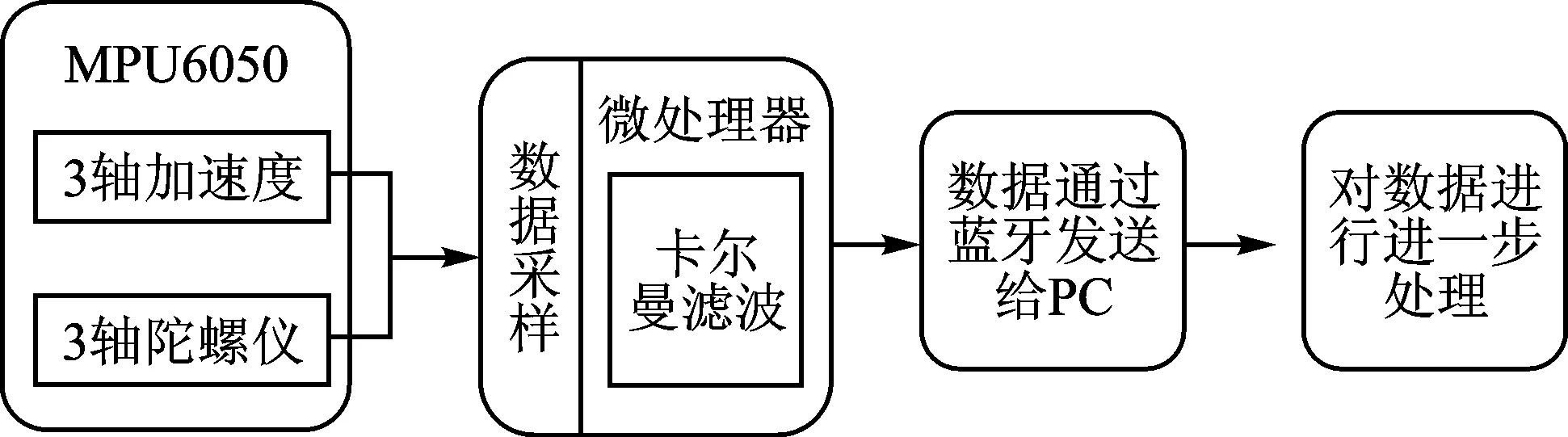
图1 系统结构图
微处理器对采集到的信号进行卡尔曼滤波,以获得更为精确的数据。
2 跌倒检测算法设计
2.1 数据采集部位的选取
2.2 跌倒检测算法
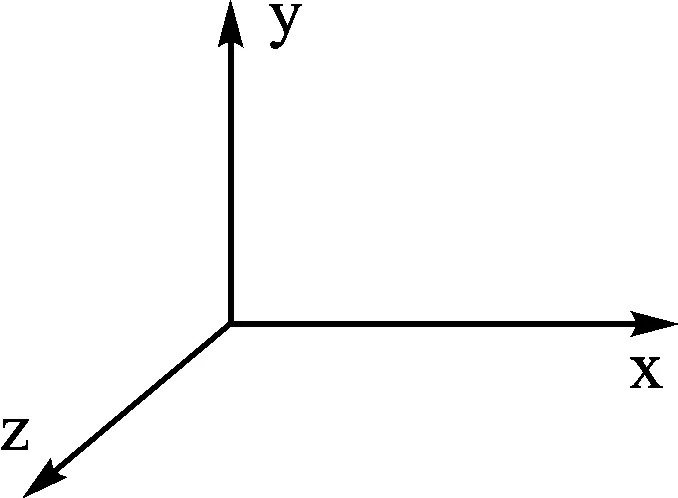
图2 坐标系
根据输出的加速度、角度特征信息,为了实现简单有效的状态识别,从宏观的角度考虑特征提取,只考虑一段时间内加速度和角度变化值,因为只要保持类似动作重复进行,加速度值和角度变化趋势就会出现周期性[14]。
设任意时刻 t 时,aSVM的计算公式如下:
为了佩戴方便,按图2方式建立坐标系。角度说明如表1所列。
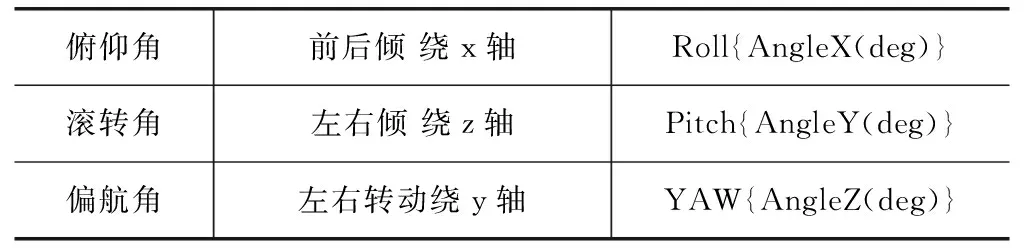
表1 角度说明
图3采集的分别是当人体前-后-左-左前-右-右前倾斜时的角度变化图。所以用角度变化来辅助判断人体的运动状态是很有效的方法。
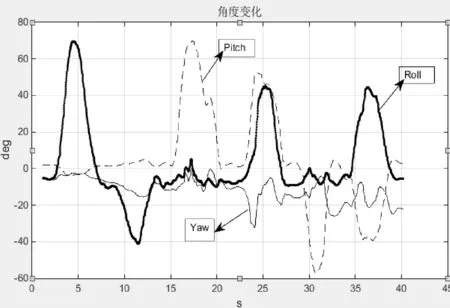
图3 人体倾斜姿态角度图
3 支持向量机算法设计
3.1 支持向量机算法
支持向量机(Support Vector Machine,SVM)本质为监督学习的分类器,分为线性分类器和非线性分类器,根据本文所研究的跌倒与日常活动状态的识别,可将其看做为线性的二分类问题。然而,决策分界面可能存在多个,如图4所示。
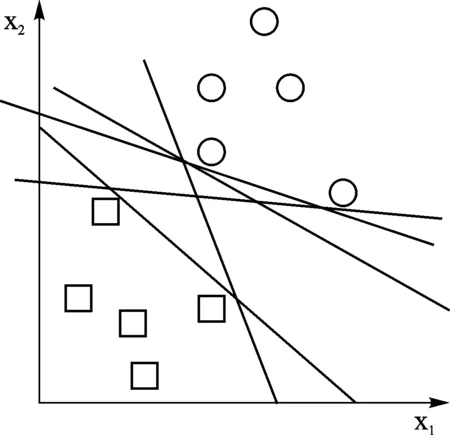
图4 SVM线性分类图
最佳决策分界面能达到支持向量与超平面间的最小距离的最大值,即两类样本间的距离达到最大,图5中H界面即为最优分类界面。
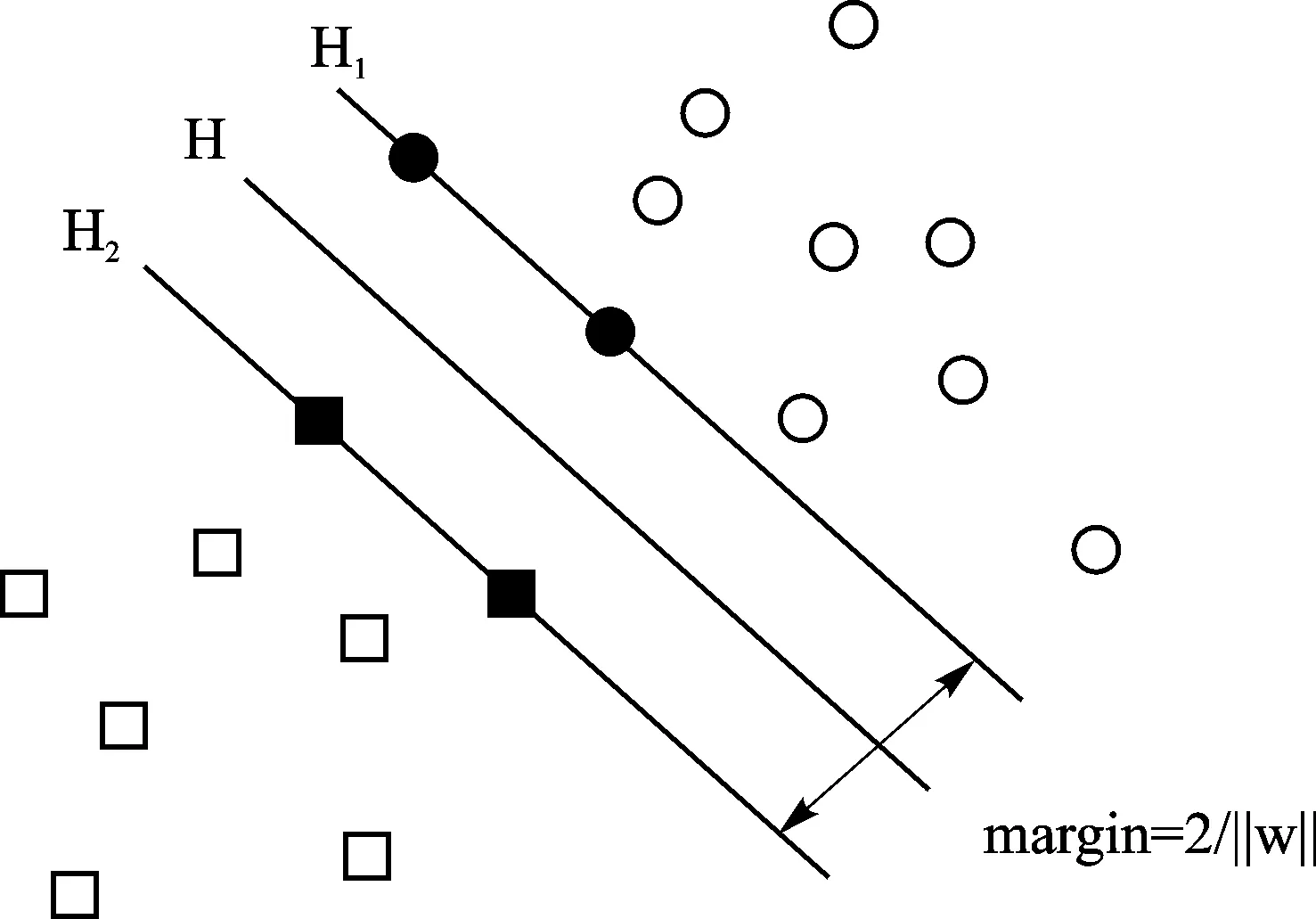
图5 最优决策分解面图
N维特征空间中,二分类线性判决函数为:
d(x)=WTx+b=w1x1+w2x2+,…,+wnxn+b
(1)
对属于任意一类应满足:
左小龙蹲趴在地上,依靠着被调到最暗的橘黄色路的微光,摸索着把散落周围的引擎部件一片一片拾了起来,满手都是机油,然后让泥巴跑到远处的店里要了一个塑料袋,他将这些残缺的发动机瓦,活塞,曲轴,连杆等东西放进了塑料袋里。但因为金属部件周围都是棱角,塑料袋一下就穿了,这些东西又散落在了地上。泥巴说:“算了。”
yi(WTx+b)≥1 (i=1,2,…,N)
(2)
则对应的分类界面H为:
WTx+b=0
(3)
样本点到超平面的距离为:
(4)
为了使pc(w)最大,所以最佳分类界面的约束条件是在条件公式(2)下使||w||最小。使用拉格朗日函数公式和KKT条件:
(5)
其中λi为拉格朗日乘子,其中λi≥0。
根据拉格朗日特性,将问题转化为极值问题即可求解。
3.2 阈值的选取
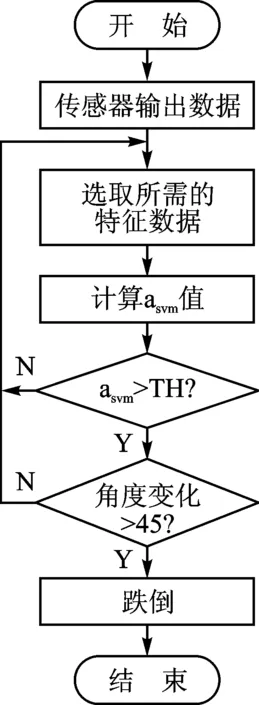
图6 人体跌倒算法流程图
采用机器学习的方法训练正常活动与状态转移、跌倒的分类阈值,在进行跌倒检测的过程中,先利用此阈值对待检测数据进行初步分类,然后针对检测到的疑似跌倒进一步进行分析[6]。日常活动中,一些非跌倒状态发生转变时,也有可能存在合加速度突然增大的现象,如由静止到跑步,由站立到突然坐下。有时其峰值会达到跌倒产生的合加速度峰值,因此单靠单一阈值来判断不够准确,需要用角度来辅助判断。
对选取的样本按照60%和40%的比例分成训练集和测试集。
ΩT: 样本训练集(Train Samples)。30次老人跌倒行为(包括侧跌及俯仰跌倒)和正常行为数据,15次站立、行走及静止到慢跑等样本。通过训练学习,获取阈值TH。
ΩE:测试集(Experimental Samples),验证TH的有效性。人体跌倒算法流程图如图6所示。
4 实验验证与分析
4.1 实验设计
为了验证本文设计的人体跌倒检测系统的有效性,做了多组动作的实验,日常生活活动(Activities of Daily Living, ADL)中正常行走、跑步、由静止到行走、静止到跑步、静止到坐下等状态转移数据。跌倒模式中的向前、后、左、右方向的跌倒。
4.2 实验结果分析
图7、图8、图9为当人在行走时,可能出现的一些情况,如向左侧或右侧转弯、停顿等。从图中可以看出,当人在进行正常的行走时,除了绕Y轴的偏航角Yaw变化明显外,俯仰角和滚转角变化都很小,加速度变化范围除呈周期性变化外,合加速度asvm的值也大都在0.6×10~1.6×10 m/s2范围以内。
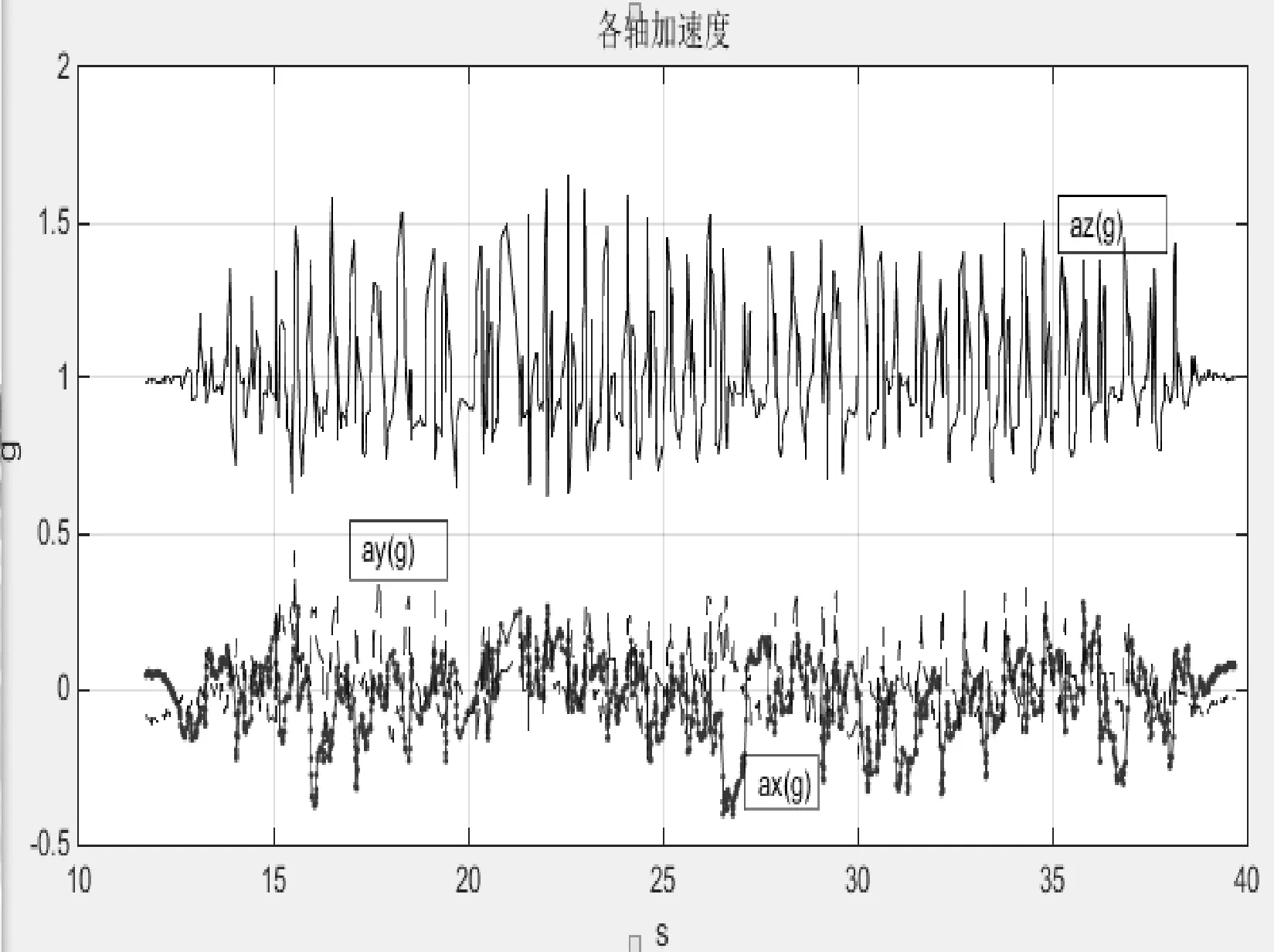
图7 各轴加速度值
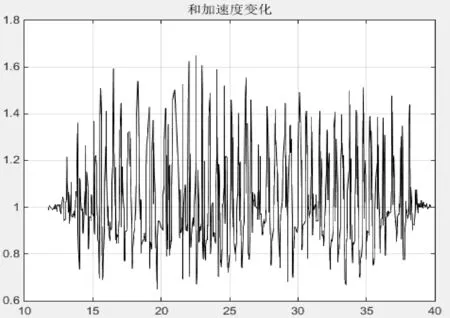
图8 asvm的值
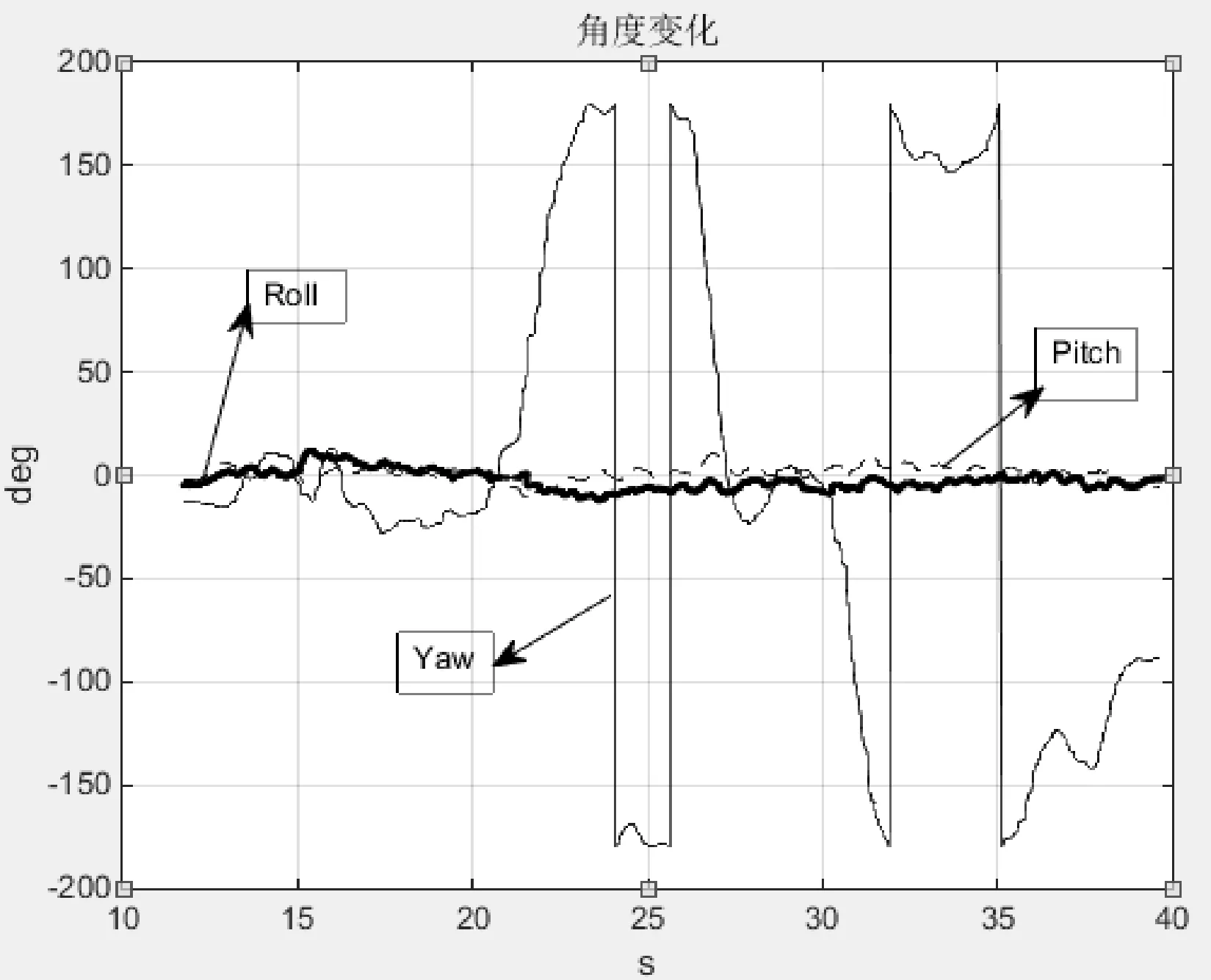
图9 人在正常行走转弯时各轴角度变化
图10、图11、图12、图13四张对比图中可以看出,当加速度大于阈值时候通过判断俯仰角Roll{AngleX(deg)}可以判断出是否跌倒。
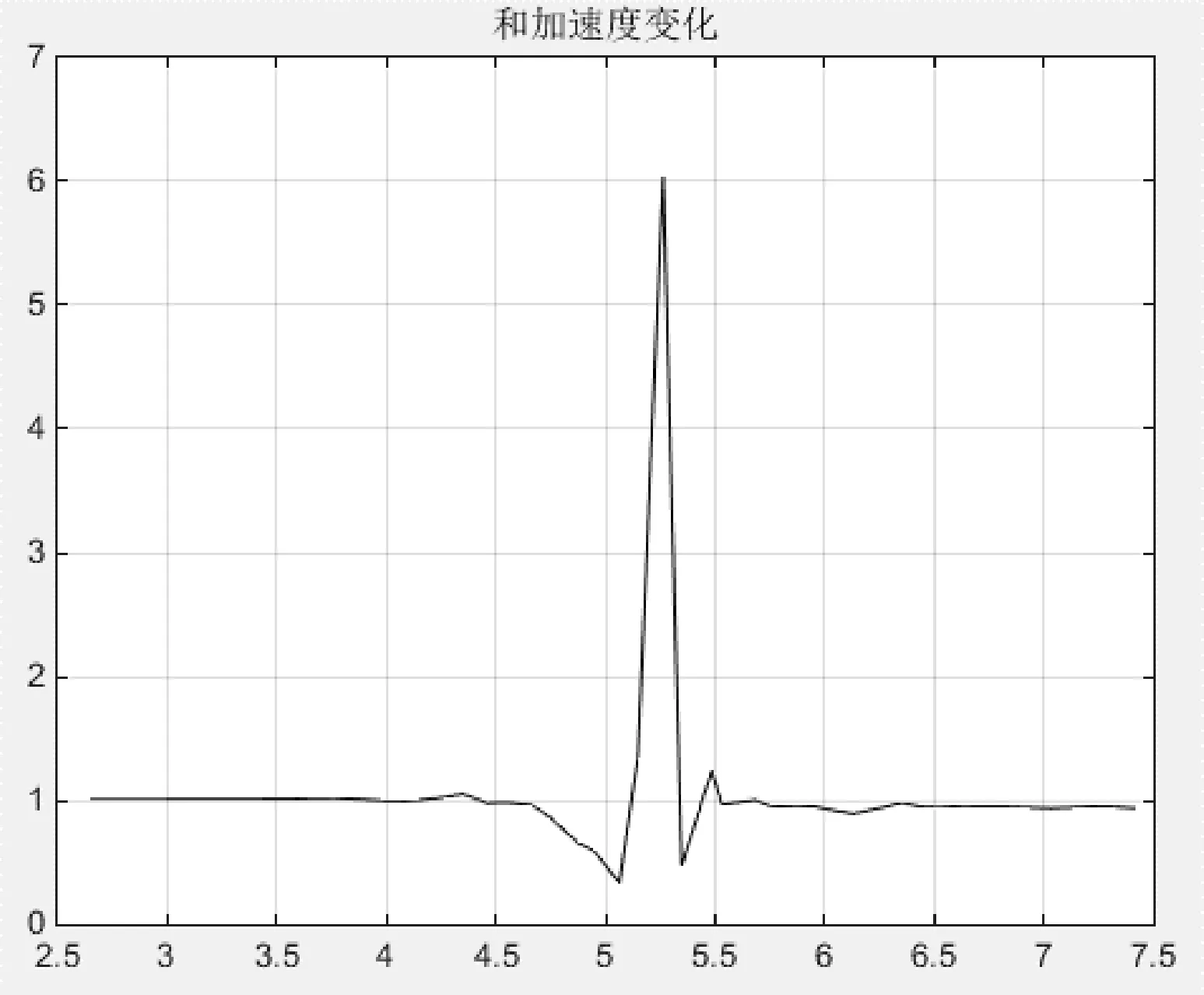
图10 人体摔倒时的asvm
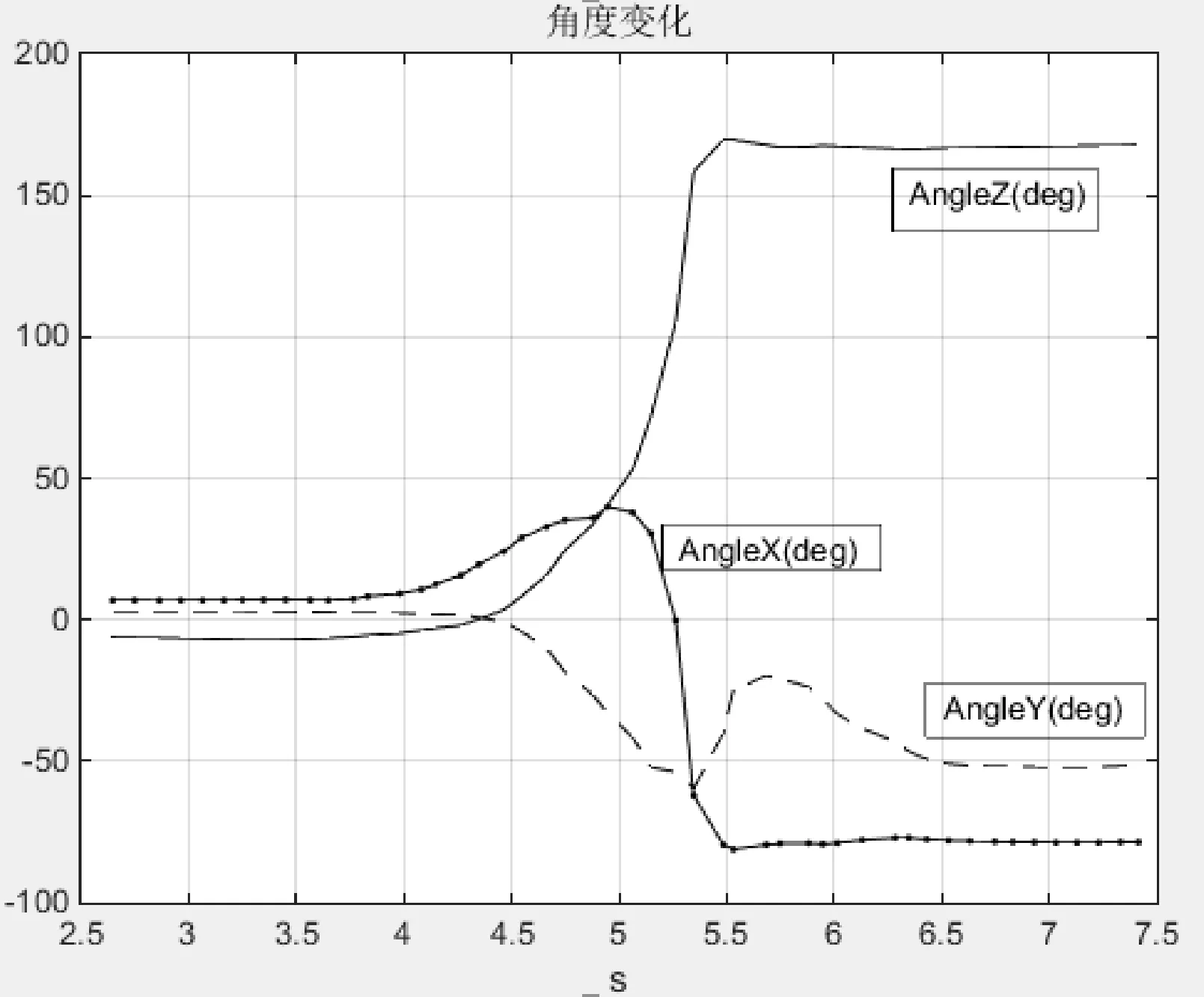
图11 人体摔倒时的各轴角度变化
从图10和图11可以看出,t在(5,5.5)时间段为人体摔倒时间,asvm大于人正常运动时的阈值TH, 俯仰角Roll{AngleX(deg)}从t>5 s就开始大幅度变化在5.5 s附近时,角度与最初的角度相比,变化的绝对值超过45°。
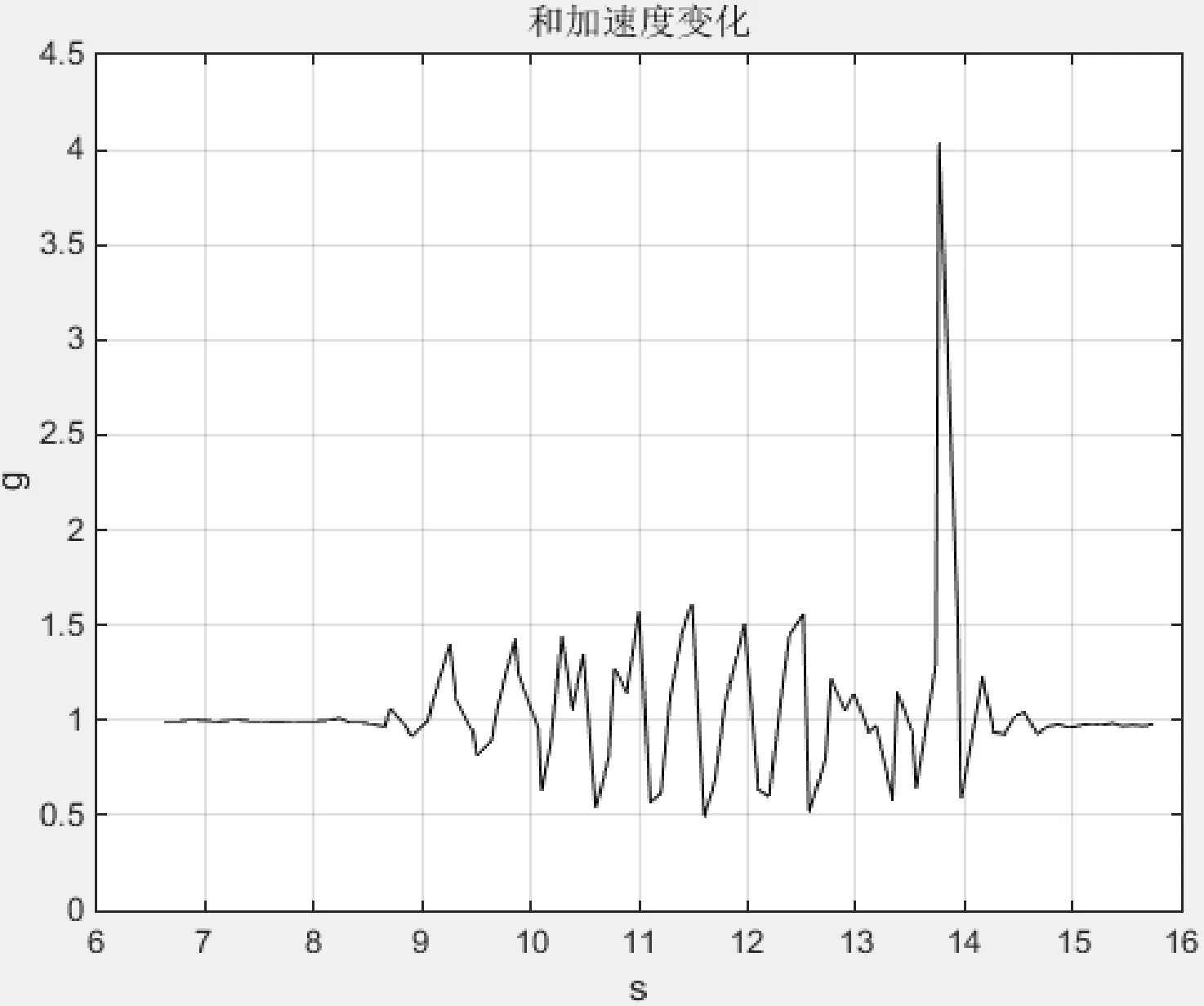
图12 人体由静止到走到突然坐下时的asvm m
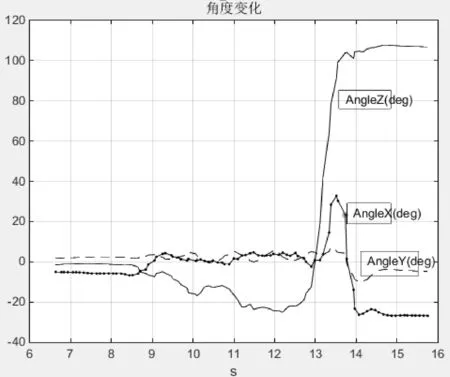
图13 人体由静止到走到突然坐下时的各轴角度变化
从图12和图13可以看出,人由静止到行走时,俯仰角Roll{AngleX(deg)}虽然有变化,但范围较小,t在(13.5,14)区域时,人的状态发生突变,如突然坐下,此时asvm>TH,通过观察Roll可以看出角度与最初角度相比,最大变化量的绝对值小于45°,说明人体没有跌倒。
所以通过asvm和Roll可以识别出人体是否跌倒。通过大量实验和数据证明该系统非常有效,准确率要高于基于单一传感器的系统。
结 语

[1] Noury N,Fleury A,Rumeau P,et al.Fall detection-principles and methods[C]//International Conference of the IEEE Engineering in Medicine&Biology Society Conf Proc IEEE Eng Med Biol Soc,2007:1663.
[2] Ngo Y T,Nguyen H V,Pham T V.Study on fall detection based on intelligent video analysis[C]//International Conference on Advanced Technologies for Communications IEEE,2012:114-117.
[3] Nyan M N,Tay F E H,Manimaran M,et al.Garment-based detection of falls and activities of daily living using 3-axis MEMS accelerometer[C]//Journal of Physics Conference Series. Journal of Physics Conference Series,2006:1059.
[4] Jeon A Y,Kim J H,Kim I C,et al.Implementation of the Personal Emergency Response System using a 3-axial Accelerometer[C]//International Special Topic Conference on Information Technology Applications in Biomedicine IEEE,2007:223-226.
[5] Wang R,Zhang Y,Chen J X.Design and implementation of fall detection system using tri-axis accelerometer[J].Journal of Computer Applications,2012,32(5):1450-1452.
[6] 高晓娟,徐光辉,张欢,等.基于加速度特征的人体跌倒检测算法[J].西安工程大学学报,2015(1):90-94.
[7] Purwar A,Jeong D U,Wan Y C.Activity monitoring from real-time triaxial accelerometer data using sensor network[C]//International Conference on Control,Automation and Systems. IEEE,2007:2402-2406.
[8] R E Kalman.A New Approach to Linear Filtering and Prediction Problems[J].Transaction of the ASME-Journal of Basic Engineering,1960,82(3):35-45.
[9] 周道兵,骆鹏,肖国强,等.利用Kalman滤波的视频运动目标跟踪[J].西南师范大学学报:自然科学版,2009, 34(6):113-118.
[10] 罗鹏飞.统计信号处理基础[M].北京:电子工业出版社,2011.
[11] 冯智勇,曾瀚,张力,等.基于陀螺仪及加速度计信号融合的姿态角度测量[J].西南师范大学学报:自然科学版,2011,36(4):137-141.
[12] 佟丽娜.基于力学量信息获取系统的人体摔倒过程识别方法研究[D].合肥:中国科学技术大学, 2011.
[13] 李娜,侯义斌,黄樟钦,等.基于三轴加速度信号的实时人体状态识别算法[J]. 北京工业大学学报,2012,38(11):1689-1693.
[14] MATHIE Merryn.Monitoring and interpreting humanmovement patterns using a triaxial accelerometer[D].Sydney Australia:School of Electrical Engineering andTelecommunications,University of New South Wales,2003.
