某大型平台上驳下水作业通航安全风险分析
2018-06-14,,
,,
(1.交通运输部天津水运工程科学研究院,天津 300456;2.武汉理工大学 航运学院,武汉 430063)
TZ-400平台由天津港太重码头滑移至半潜驳船“泰瑞”,利用半潜船将平台拖带至下潜区;在下潜区内进行平台和半潜船分离,分离后由拖船将平台拖带靠泊码头,完成平台下水作业。选择TZ-400平台上驳、下水作业为研究对象,分析平台滑移至半潜驳船及由半潜驳船下水分离过程中存在的通航安全风险,提出保障措施。
1 概况
1.1 平台介绍
TZ-400平台尺寸长×宽×高为70 m×72 m×9.5 m,下水质量11 000 t,漂浮吃水3.4 m,最大拖航吃水5.7 m[1]。
1.2 码头概况
太重码头位于天津港大沽口港区第二港池西侧,舾装泊位4个(1#~4#)。回旋水域按载重量50 000 t散货船设计。码头顶标高6.0 m,前沿底标高-13.5 m,停泊水域宽度100 m,回旋水域直径460 m,底标高-12.0 m。港池水域设计底标高-12.0 m。
1.3 作业概况
平台整个下水作业分为2个阶段:①平台滑移上驳[2];②下潜分离。首先,平台上驳:利用重载运输系统设备在1#泊位将平台滑移至半潜驳。选择合适气象、海况,将半潜船纵、横倾值调载至预定值,使得半潜船滑道与码头滑道相平[3]。平台移动上驳,半潜船不断调载,始终保持半潜船与平台底部接触。随着平台重心转移至半潜船,平台整体上驳。其次,拖带半潜船至下潜区,半潜船定位。半潜船注入压载水,不断下潜[4]。随着半潜船下潜,平台逐渐漂浮。当半潜船与平台完全分离时,半潜船停止压载,平台顺利起浮,分别拖带平台和半潜船靠泊码头。
2 规范性分析
2.1 码头停泊水域水深
根据《海港总体设计规范》规定,码头前沿设计水深为[5]
D=T+Z1+Z2+Z3+Z4
(1)
式中:D为码头前沿设计水深;T为设计船型满载吃水;Z1为龙骨下最小富裕深度;Z2为波浪富裕深度;H4%为码头前沿允许停泊的波高;Z3为船舶因配载不均匀而增加的船尾吃水值,干散货船和液体散货船取0.15 m,杂货船不计;Z4为备淤富裕深度。
港池设计低水位0.5 m,港池底标高-5.0 m;码头前沿底标高-13.5 m符合规范。
2.2 停泊水域宽度
码头前沿停泊水域取码头前2倍设计船宽的水域[6]。半潜船所需宽度为67×2=134 m。太重码头前方港池水域满足半潜船旋回作业要求的水域宽度为650 m,停泊水域宽度满足规范要求。
2.3 回旋水域水深
根据《海港总体设计规范》,回旋水域的水深可取航道设计水深,按下列公式计算。
D0=T+Z0+Z1+Z2+Z3
D=D0+Z4
(2)
式中:D0为航道通航水深;D为航道设计水深;T为设计船型满载吃水;Z0为船舶航行时船体下沉量;Z1为航行时龙骨下最小富裕深度;Z2为波浪富裕深度;Z3为船舶装载纵倾富裕深度;Z4为备淤深度。
港池设计低水位0.5 m,其底标高-5.53 m;港池旋回水域底标高-12.0 m符合规范。
2.4 回旋水域范围
太重码头掩护条件较好,水流不大,在港作拖轮协助下,根据《海港总体设计规范》,回旋水域按(1.5~2.0)L计算,为166.5~222.0 m。旋回水域设计直径宽度460 m,满足半潜船旋回作业需要。
3 合理性分析
3.1 上驳潮汐计算分析
平台上驳过程中,半潜船滑道始终与陆地滑道对正,潮汐时间变化引起半潜船浮态时刻变化。由于涨潮时半潜船吃水增加,新增浮力可抵消转移至半潜船上的平台重量。相反,若装船进行至落潮阶段,则需泵系统抵消新增重量的同时抵消落潮的影响,可能造成泵能力不足。因此,平台上驳应尽量选择涨潮时段。
TZ-400平台质量11 000 t,半潜船空船吃水3.0 m,型深9.0 m,平台上驳后半潜船增加吃水1.75 m(若半潜船不调载),码头顶标高6.0 m,码头上和半潜船上滑道高度均为0.3 m。应保证半潜船滑道始终保持与陆地滑道对正,计算结果见表1。
潮水位+干舷高度=码头顶标高
潮水位+9.0-(3.0+1.75)=6.0

表1 下水潮汐计算表 m
码头和半潜船保持相平所需最小潮高为1.75 m。由潮汐表可知,上驳期间天津港白天符合最小潮高(即1.75 m)的时间为7 h,上驳作业大约需3 h,因此,该码头水文条件适合平台上驳。
3.2 下潜区位置分析
下潜区长、宽均为200 m,底标高-16.0 m,用于平台下潜分离。
大沽沙航道过往航行船舶对平台下水为作业存在影响,主要体现在船舶航经港池口门时产生的船行波影响平台分离[7],对半潜船和平台形成扰动,造成船舶失稳、平台摇摆、船和平台碰撞、平台偏移等。理论、观测及试验表明[8],船行波的波高不仅与船速有关,还受船型、水深等因素影响。船速是船行波最主要因素。船行波波高随船速增加而增高,随距离增加而衰减。根据生产实践、半潜船船长经验认为,限定周边水域行船航速15 kn以下,限定行船距离半潜船500 m以上,则船行波对下潜作业带来的影响可忽略。
大沽沙航道通航10万t级船舶,规定航速不大于13 kn[9];下潜区北侧边界线与大沽沙航道南边界线相距860 m。则航道过往船舶对下潜作业影响很小。下潜区与大沽沙航道位置见图1。
3.3 下潜区水深分析
半潜船下潜需合适的水域,水域应要满足水深要求,保证半潜船下潜安全。平台受风浪影响摇摆差取0.5 m,在半潜船下潜时,平台与主甲板支架富余高度取1.0 m,分离作业过程中甲板上支架高度取1.0 m,取值过小不利于安全,过大不利于分离作业。此外,平台吃水3.4 m,半潜船型深9.0 m,船底龙骨下最小安全间隙为1.0 m,据此核算半潜船浮卸作业水域所需最小水深。
根据平台和半潜船参数,参考各种因素,下潜分离作业所需最小水深推算见表2。
下潜区底标高为-16.0 m,满足半潜船下水分离作业。
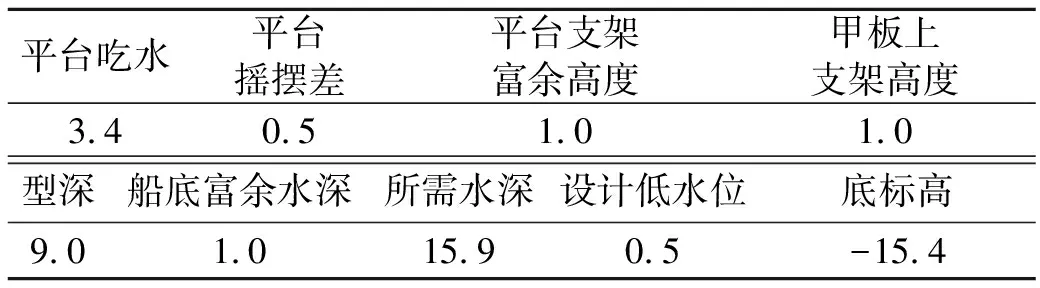
表2 作业水深要求最小水深计算结果 m
3.4 下潜区范围分析
在下潜分离过程中半潜船利用拖轮抛锚、固定船位。半潜船抛锚后,受风、浪、流的变化而摆动,分离时其摆动的半径要考虑平台和拖轮的影响。半潜船分离作业选在风和流都相对稳定时间段进行,故认为半潜船只以锚位为支点左右摆动,所需下潜区是半潜船长、宽各自加富余宽度的矩形水域。半潜船船长111 m,宽度67 m,考虑摆动富余宽度50 m,则下潜水域范围为长161 m,宽117 m,下潜区长、宽均200 m,满足半潜船下潜作业要求的。
4 作业通航风险
4.1 作业本身存在的风险
1)平台上驳、下潜分离作业受气象、水文等自然条件影响明显,当气象海况恶劣时,将影响平台和半潜船安全。
2)平台上驳、分离对半潜船稳性要求高:上驳时平台重量逐步转移至半潜船,导致半潜船左、右两侧吃水不同,可能出现半潜船稳性变化;当半潜船下潜时稳性不好时,可能导致倾覆。
4.2 作业对通航环境影响
1)平台在太重码头1#泊位上驳装船,用时约3 h。为避免相邻泊位船舶碰撞半潜船及其船行波对半潜船稳定性带来影响,需设置排他作业区,禁止其他船舶进出该水域,则影响相邻泊位船舶无法靠离泊作业。
2)二港池内锚泊其他砂石船、渔船、运输船,以上船舶作业、航行都将对平台上驳和下潜作业带来影响:①二港池水域有限,平台下潜时抛锚需较大水域,其他船舶占用港池水域;②其他船舶航行时船行波影响平台上驳和下潜安全。因此,作业前应对其他船舶进行安排。
5 相关建议
1)建议在太重靠泊码头安放测量水尺,对码头海域进行潮水测量,并与潮汐表比对。
2)制定并严格遵守平台上驳、下潜、港池拖航等阶段作业条件,实测:风速<6级;浪高<0.5 m;流速<0.5 kn;能见度≥1 km;白天作业。
3)控制上驳时驳船与码头高度差≤2 cm;(高差超出时滑移停止,驳船调载)。
4)为保障上驳期间半潜船稳定,设置4根钢缆固定半潜船前后两侧,抵抗风、浪、流作用,确保半潜船不发生横移。
5)在下潜区4端点处分别设置临时浮漂精确标示下潜区,避免半潜船搁浅,并禁止无关船舶进出下潜区。
6)为进一步保障下潜作业安全,建议平台下潜分离期间,大沽沙航道中超过5万吨级以上的大船限速8 kn以下。
7)整个作业期间(上驳、系泊、下潜和拖航作业),应发布航行警告[10],禁止无关船舶进出。
8)将整个港池作为排他作业区,设置警戒力量,作业期间禁止其他无关船舶进入港池。
[1] 交通运输部天津水运工程科学研究院,太重滨海公司TZ-400钻井平台下水作业通航安全保障研究报告[R].天津:交通运输部天津水运工程科学研究院,2016.
[2] 黄曙光,于皓,王铭飞,等.陆地水平滑道建造自升式钻井平台滑移装船技术研究及应用[J].中国海上油气,2011,23(3):201-204.
[3] 谢宛朋,张金营,史亮,等.自升式平台下水的新型技术装备研制及应用[J].船海工程,2017,46(2):134-137.
[4] 闵兵,舒仕勇,李志垒.半潜式自航工程船在海洋工程中的应用[J].中国造船,2010,51:18-24.
[5] 李伟,郭云龙,薛仕中,等.南通航母公园涉水工程方案通航风险分析[J].船海工程,2017,46(4):223-227.
[6] 海港总体设计规范:GB/JTS165-2013 [S].北京:人民交通出版社,2014.
[7] 杜嘉立,高凯,姜华.基于船行波安全航速的限定[J].大连海事大学学报2005,31(2):4-7.
[8] 高凯.船舶兴波对船舶影响研究及其在受限水域中的应用[D].大连:大连海事大学,2004.
[9] 苏晨,谢新连,李晓君,等.半潜船装卸过程中周边水域限航范围估算[J].中国航海,2013, 36(1):74-79.
[10] 李伟,薛仕中,汤国杰,等.“勘探六号”进江拖航的通航安全风险分析[J].船海工程,2016,45(3):163-166.