基于CAN总线的专用车辆遥控系统控制方案设计
2018-06-13罗平邓云海邓希来延伟
罗平 邓云海 邓希来 延伟
三一汽车制造有限公司 湖南省长沙市 410100
1 引言
随着科学技术的发展,电子化、信息化、网络化和智能化已成为未来车辆的发展趋势。为使工作人员远离恶劣、危险的作业环境,降低劳动强度,确保人身安全,本文对专用车辆遥控技术进行研究,在普通专用车辆(内燃发动机和AT自动变速箱)的基础上,经过机械及电气化等系统结构进行简单的改造,在不消除专用车辆原先手控能力的基础上,基于CAN总线分布式网络结构,无线射频通信技术,PID控制技术,设计研发并改造出一种可用于危险区域的侦查和排险工作等特殊环境和场合的无线遥控车辆,实现其遥控和手工驾驶并用。

图1
2 遥控驾驶车辆系统概述[1]
遥控驾驶车辆系统是由遥控驾驶员、遥控驾驶装置、车辆构成的闭环控制系统。实现方式:被控车辆的运行状态和前方的景物图像、位置等环境信息,由车前摄像装置、毫米波雷达等环境感知器件和GPS等各种传感器定位融合器件,经无线射频传输,在遥控显示器上显示。遥控驾驶员依据这些信息,操作遥控手柄,将驾驶意图以数据代码的形式通过通信系统传输到被控车辆上的整车控制器,来执行对车辆的最终操纵控制,使车辆按照意图行驶。如图1所示:
3 总体设计方案
本文所研究的对象是基于内燃发动机以及AT变速箱的专用车辆。
根据功能需求,对遥控车辆关键部件进行合理选型设计以及机械接口和电气接口的改造。具体包括转向控制、制动控制、换挡控制、油门控制、遥控装置的方案设计、器件选型和改造。整体架构基于CAN总线分布式网络实现。子系统与整车控制器之间交互独立进行,互不干扰,以增强系统的可靠性。为保证控制器对底层子系统的绝对控制权,4个子控制系统中采用中断方式接受CAN总线的指令,并将CAN中断优先级设置为最高优先级,如图2:
4 分系统设计方案
4.1 转向控制系统
原车辆采用液压助力动力转向系统,如图3所示:
遥控转向控制设计采用:EPS+HPS集成电液转向系统方案。在传统循环球转向器的输入端布置电动助力装置。由集成转角和扭矩传感器以及电机的转向油泵、转向控制器、储油罐、转向器等组成。改造费用低,结构变化小,周期短。控制原理图如图4:
具体实施过程:操作者通过遥控操作装置先进行遥控和手动驾驶模式切换,再发出转向信号,通过无线射频方式发送,由遥控接收装置接收,并通过CAN总线传输给整车控制器接收,再由其通过CAN总线发给转向电机控制器,由其发出转向角指令,驱动伺服转向电机,实现驾驶转向功能。为保证驾驶安全性,在驾驶员手动介入时,可通过方向盘下方的扭矩传感器优先切换到EPS辅助助力模式,退出遥控模式。 具体联调过程则采取PID控制技术进行车辆转向角和转向响应时间调整,保证转向的平顺性以及快速响应。

图2
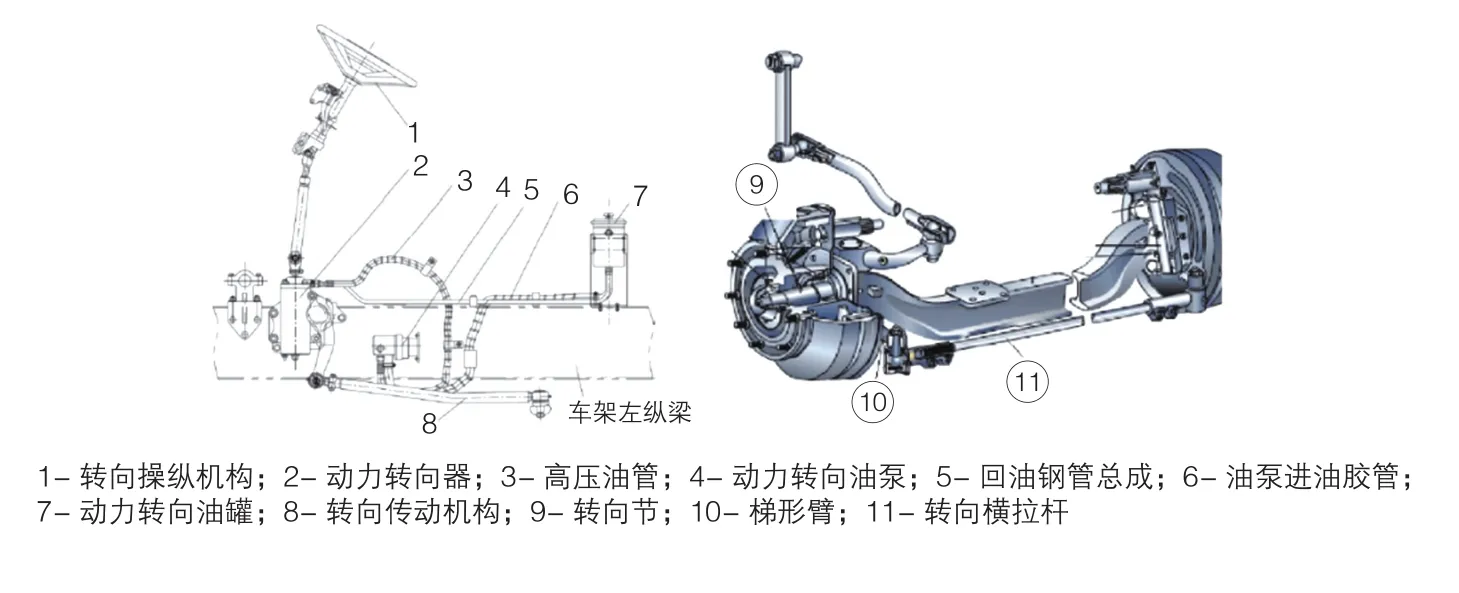
图3

图4
4.2 制动控制系统:
原车上的制动系统是一套安装有ABS系统的液压制动系统[2],其工作原理示意框图如图五所示,驾驶员踩踏制动踏板,产生对制动主缸中制动液的压力,将制动液通过制动管路压入车载ABS系统中,ABS系统经过压力调节,产生控制制动轮缸的制动压力,进而使车辆发生制动动作。
车辆遥控制动有多种方式,比如使用EMB电控制动。为方便改造采用直线电机作为驱动,采用拉线分别与电机推杆和制动踏板连接。遥控驾驶时,通过遥控器控制直线电机进行动作,电机推杆的缩回和伸出,拉动拉线和放松拉线,从而实现制动踏板进行制动和制动解除。工作原理如图6:
遥控驾驶时,车外人员通过遥控信号发生器3发出制动信号,车内的遥控信号接收器4接收信号,传送给整车控制器5,控制器输出信号至电机6,电机动作,推杆缩回,拉动钢丝滑动,钢丝拉动踏板下压,实现车辆制动;反之,电机推杆推出,制动踏板依靠本身的回位功能自行回位,制动解除。
4.3 换挡控制系统
目前原车采用AT自动变速箱和操纵杆式换档器,手动从N档进到D或者R档位,再通过变速箱TCM根据发动机CAN 总线发送的扭矩要求实现自动换挡。
遥控换挡控制:遥控时,采用继电器断开换挡器2#针脚,手动换挡器停止工作,再通过整车控制器发送CAN报文模拟换档器发生信号和变速箱通讯,实现遥控前进后退。分三种工况实施换挡:N挡,N挡→D挡或N挡→R挡,D挡→N挡或R挡→N挡。具体档位变化仍由变速箱TCM依据发动机转速和负载扭矩以及油门开度自动切换。

图5 制动系统原理示意框图

图6
4.4 油门控制系统
原车油门控制是发动机ECU读取油门踏板不同角度的电压值,结合负载扭矩、水温、油压、尾气排放等条件实施转速控制。
遥控油门控制:首先通过模式切换按钮进入遥控模式,通过一个继电器断开油门踏板模拟量信号,再由遥控发射装置输出数字量信号,遥控接收装置接收后,通过CAN总线发送给整车控制器。再由其转换计算为油门开度百分比数字信号(手柄最大开度时定义为100%,手柄未动作时开度定义为0%)发送给发动机ECU,实现发动机转速的控制。工作原理图如图7:
4.5 遥控控制系统
遥控发射装置采用无线433MHZ频段,为方便人员操作,选用摇杆式数字化手柄和钮子开关实施遥控操作。左边手柄实施转向操作,右边手柄实施油门加减速以及前进后退操作。同时中间布置一液晶显示屏,实时显示远程传回的视频信息。面板上布置的钮子开关用于各种开关量的控制。硬件框图如下,实物照片如图8:

图7
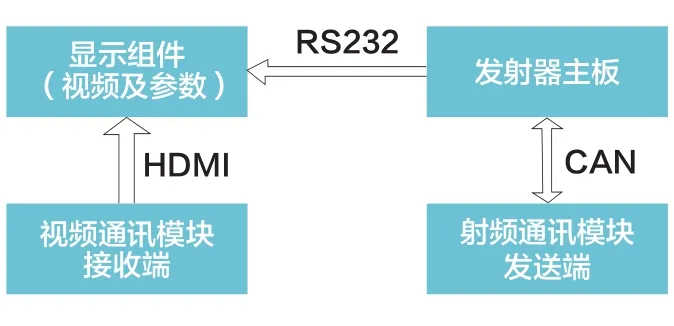
图8

4.6 整车安全性控制设计
为保证整车遥控安全性,在遥控装置上增加急停开关,当遥控失效或各种异常情况下,可实施应急制动模式,紧急制动并熄火。
5 软件系统方案
软件系统分为遥控端控制系统软件模块设计和整车控制器软件模块设计两大部分。遥控端控制系统软件模块包含数据采集程序、数据处理程序、发送数据程序三个主要的程序。整车控制系统软件模块设计主要包含数据接收程序、数据发送程序、档位控制程序、转向控制程序、油门控制程序、整车控制程序这七个主要的程序。
采用符合IEC 61131-3标准的结构化文本,选用ICS公司的ISaGRAF软件编写代码。在系统分析控制器局域网CAN总线协议的基础上,借鉴SAE J1939标准,自定义了基于CAN总线的无人车辆控制通信协议,并通过发送命令字的方式实现了车辆的总线遥控功能。
6 实车测试效果
整车集成设计改造完毕后,进行了场地实验,验证在一定车速下,车辆是否按照遥控方式进行相应的前进、后退、加速、减速、左右转向和制动动作。并通过现场多次PID调节转向控制器精度和响应时间,PWM调节制动效果,达到预期效果。主要表现在:
(1)控制精度高,以转向为例,转向系统的控制精度可以达到0.2度。响应时间在50ms以内。100米直线行驶稳定性可以达到0.5米以内。
(2)响应时间短。每个子系统的控制周期均在20ms以内。底层控制系统能够做到制动敏捷,加油迅速,转向灵敏,所达即所控。
7 结语
本文设计的4个遥控驾驶控制系统,均有各自不同的特点。转向控制系统增加了转向电机控制,油门和换挡控制系统通过简单的切换控制信号,最大限度的使用原车系统。制动控制系统另外并联一套步进电机拉丝结构,控制效果良好。使用CAN总线将4个控制系统以分布式方式连接,该遥控控制系统的设计方法,与原车兼容性非常好,可实现有人驾驶与遥控驾驶之间的方便快捷的切换。且没有复杂的机械设计,对原车改动小,达到了控制精度高,响应快,开发周期短、费用低的优点。实现了遥控车辆的机械结构和电气化改造安装,完成了控制系统软件和硬件的设计与调试。
测试实验以及整车集成试验表明,该设计方案可实现远程遥控操作车辆底层各子系统的目的,为用于危险区域的侦查和排险工作等特殊环境和场合的专用车辆的进一步研究奠定基础。
