基于MSP430的智能阀门定位器研制
2018-06-12朱天宇董全林刘日
朱天宇 董全林 刘日
摘 要: 针对工业控制领域对调节阀控制精度和稳定性的要求,设计一种基于MSP430单片机的智能阀门定位器。定位器采用MSP430F5438为核心控制器,执行单元选择高速开关电磁阀,控制算法上采用模糊控制整定PID参数。定位器除可以精确定位外,还具有自整定、自诊断、阀位输出等多种附加功能。在对系统的设计原理、控制要求进行简要说明后,依据模块化设计方法对硬件电路及软件进行了设计。实验结果表明,该系统具有控制精度高、稳定性好、功能丰富、智能化程度高以及便于维护等特点。
关键词: 智能阀门定位器; MSP430F5438; 硬件设计; 软件设计; 电磁阀; 模糊控制
中图分类号: TN141.2?34; TP216 文献标识码: A 文章编号: 1004?373X(2018)12?0001?05
Abstract: In allusion to the control precision and stability requirements of the regulating valve in the industrial control field, an intelligent valve positioner based on MSP430 SCM is designed. In the positioner, MSP430F5438 is used as the core controller, the high?speed switching solenoid valve is selected for the execution unit, and the fuzzy control is used in the control algorithm to tune the PID parameters. In addition to the function of accurate positioning, the positioner also has various auxiliary functions such as self?tuning, self?diagnosis and valve position output. After a brief description of the system′s design principle and control requirements, the hardware circuit and software were designed according to the modularized design method. The experimental results show that the system has the characteristics such as high control precision and stability, rich functions, high intellectualized degree, and easy maintenance.
Keywords: intelligent valve positioner; MSP430F5438; hardware design; software design; solenoid valve; fuzzy control
閥门定位器是工业过程控制领域的重要仪表,在石油化工、水利、冶金等行业有着广泛应用[1]。因相关技术水平的差距,国内市场一直被国外大企业所占据。为了振兴民族工业,本文研制了一款基于MSP430单片机的高性能智能阀门定位器,其功能完备,定位效果好。
1 系统设计原理
如图1所示为智能阀门定位系统的基本构成。系统将传来的4~20 mA(或其他信号制式)设定信号转换成数字信号后送入微处理器,同时将阀门开度信息经位移传感器转化为电信号反馈回微处理器。微处理器将这两个信号作差,如果偏差在死区范围内,则使两个开关电磁阀均处于切断状态;否则根据偏差的大小经过阀位控制算法得出相应的PWM控制信号来控制两个电磁阀通断。从而调节执行机构的压缩空气流量,进而推动阀杆移动来使阀芯准确定位。对于双作用执行器,只需增加2路电磁阀对两个气室同时进行控制即可[2]。
智能阀门定位器采用三线制,电源为24 V直流电;人机交互模块包括显示器和按键,主要用于显示定位器的工作状态和输入工作参数;外部数字指令可对定位器进行一定程度的控制,主要起到保证生产安全的作用;阀位输出用于将实时的阀门开度上传到控制中心;输出报警模块可以在定位器发生故障时发出报警信号[3]。

2 系统设计要求
1) 定位精度在0.5%以内,在电源电压发生10%波动时定位精度不变。
2) 支持手动操作和自动操作两种工作模式。自动操作由外部设定信号进行控制;手动操作则通过按键操作进行开度控制。
3) 能够适配单/双作用执行器。
4) 设定信号和阀位输出信号均为4~20 mA/0~20 mA/0~10 V/0~5 V可选。
5) 具有自整定功能,通过自整定可以判断阀芯的行程范围、执行机构的气室大小以及气缸摩擦力等参数,进而确定最小进气量,调节PID参数。
6) 具有自诊断功能,可诊断设定信号意外掉电、阀门开度超限、偏差过大等,当检测到问题时可以保护系统同时输出报警信息[4]。
7) 多种流量特性(线性、等百分比、快开等)可选,具有分程控制功能。
8) 可通过外部数字指令对定位器进行简单控制,将阀门开到事先设定的安全位置。
9) 具有密码保护和中英文切换功能。
3 系统硬件设计
为减轻模拟地和数字地之间的干扰,同时充分利用定位器外壳内部空间,将硬件系统分为主控板和接口板两大部分。其中,主控板包括MSP430单片机最小系统和人机交互模块;接口板则包括电源电路、采样电路、电气转换单元驱动电路、阀位输出电路等。下面分别对各个模块进行介绍。
3.1 中央控制单元
中央控制单元是智能阀门定位器的核心,本系统采用德州仪器54系列微控制器MSP430F5438,它是一款具有16位RISC结构的超低功耗微处理器。MSP430F5438具有5种时钟源、512 kB的FLASH ROM和66 kB的RAM、带捕获/比较器的16位定时器TimerA和TimerB、12位8通道ADC以及I2C、SPI、UART通信接口。
3.2 电源电路
定位器采用直流24 V作为电源,由于工业现场的电压波动较大,而电磁阀是24 V驱动且对电压波动敏感,所以必须对24 V电压进行稳压处理。电源电路设计如图2所示。图中U3即为24 V稳压模块。根据对所选元器件的分析,本系统还需要5 V和3.3 V两种电源。LM1为24 V转5 V芯片,LM2为5 V转3.3 V芯片[5]。系统需要输出24 V作为报警信号,通过光耦IC10控制通断24 V电源来实现;且可以输入15~30 V作为外部数字指令,首先经过稳压二极管D7稳压至3.3 V,然后经光耦IC11隔离后输入到单片机引脚。
3.3 模拟信号采样处理电路
1) 设定信号采样及处理
模拟信号采样处理电路如图3所示。设定信号要求为0~20 mA,4~20 mA,0~5 V,0~10 V可选,信号制式的选择通过P9.1端口进行控制。当P9.1输出高电平时,光耦IC8和IC9关断,此时应输入电压信号;反之,应输入电流信号,而单片机A/D转换器采样的是电压信号,因此需要通过采样电阻将其转化为电压信号。
2) 反馈信号采样及处理
阀位反馈采用高精度导电塑料位移传感器,本文使用MSP430F5438内部ADC可编程配置基准电压(2.5 V)为传感器供电。运放B构成一个电压跟随器,其输出由位移传感器进行调节,P6.3/A3管脚的电压范围为0~2.5 V。
3.4 电气转换单元驱动电路
智能阀门定位器的电气转换单元由四个两位三通电磁阀构成,由于电磁阀的供电电压为24 V,不能由单片机引脚驱动,所以必须设计相应的驱动电路。首先通过单片机的I/O口驱动光耦,再通过光耦驱动三极管,最后三极管驱动电磁阀[6]。电气转换单元驱动电路如图4所示。
3.5 阀位输出电路
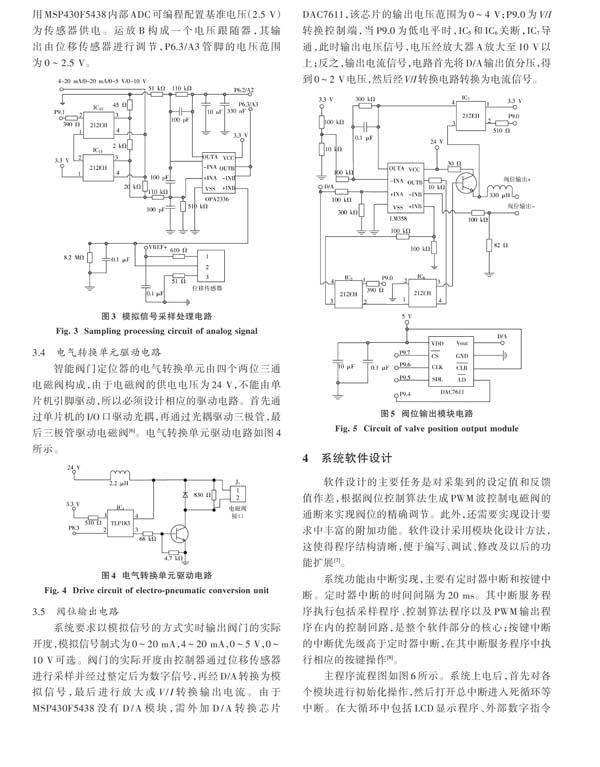
系统要求以模拟信号的方式实时输出阀门的实际开度,模拟信号制式为0~20 mA,4~20 mA,0~5 V,0~10 V可选。阀门的实际开度由控制器通过位移传感器进行采样并经过整定后为数字信号,再经D/A转换为模拟信号,最后进行放大或V/I转换输出电流。由于MSP430F5438没有D/A模块,需外加D/A转换芯片DAC7611,该芯片的输出电压范围为0~4 V;P9.0为V/I转换控制端,当P9.0为低电平时,IC5和IC6关断,IC7导通,此时输出电压信号,电压经放大器A放大至10 V以上;反之,输出电流信号,电路首先将D/A输出值分压,得到0~2 V电压,然后经V/I转换电路转换为电流信号。
4 系统软件设计
软件设计的主要任务是对采集到的设定值和反馈值作差,根据阀位控制算法生成PWM波控制电磁阀的通断来实现阀位的精确调节。此外,还需要实现设计要求中丰富的附加功能。软件设计采用模块化设计方法,这使得程序结构清晰,便于编写、调试、修改及以后的功能扩展[7]。
系统功能由中断实现,主要有定时器中断和按键中断。定时器中断的时间间隔为20 ms。其中断服务程序执行包括采样程序、控制算法程序以及PWM输出程序在内的控制回路,是整个软件部分的核心;按键中断的中断优先级高于定时器中断,在其中断服务程序中执行相应的按键操作[8]。
主程序流程图如图6所示。系统上电后,首先对各个模块进行初始化操作,然后打开总中断进入死循环等中断。在大循环中包括LCD显示程序、外部数字指令处理程序、自整定程序、自诊断程序以及阀位输出程序。
此程序包含了整个控制闭环,定时时间20 ms则为采样间隔。首先由MSP430F5438单片机自带的12位ADC对设定值和反馈值进行采样。为减小采样点高频干扰,程序中采用中位值平均滤波法:采集12个数据,去掉最高值和最低值求其平均值作为一次采样值[9]。接下来对设定值和反馈值分别进行归一化处理,将二者统一到0~100%范围内,方便进行后续处理。然后根据需要执行相应的流量特性和分程控制函数,其中流量特性包括线性、快开和等百分比。快开和等百分比也有多种曲线,甚至用户还可以自定义曲线的形状。求出偏差后执行模糊PID控制算法輸出PWM波驱动电磁阀,用模糊控制来整定PID参数[10?11],非常适合这种非线性系统。按键中断流程图如图8所示。对定位器的一切操作都是通过4个独立按键实现的,分别是确定键、向上键、向下键以及退出键。在主界面下,长按确定键3 s可实现手动操作和自动操作的切换[12],长按上/下键3 s可以打开菜单。在进入到菜单后,确定键可以进入选中的子菜单或执行选定的某项功能,上/下键可以滚动菜单。上/下键在手动操作模式下可用来设定阀门开度大小,在进行参数调整时可以调整出合适的参数。而退出键则可以在任何状态下直接退出当前操作回到主界面。
此外,定位器还具有密码保护功能,以确保生产过程的安全性;具有中英文切换功能,有利于走出国门销往海外;具有行程限定功能等。
5 实验及分析
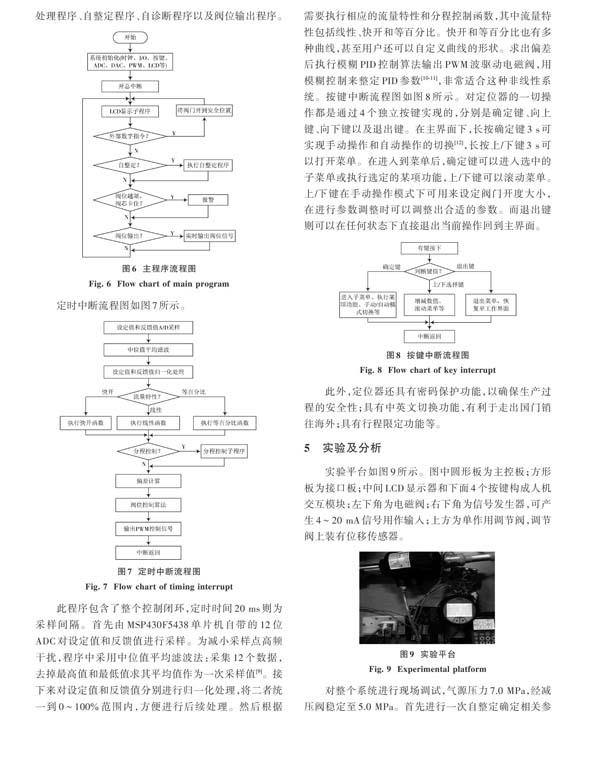
实验平台如图9所示。图中圆形板为主控板;方形板为接口板;中间LCD显示器和下面4个按键构成人机交互模块;左下角为电磁阀;右下角为信号发生器,可产生4~20 mA信号用作输入;上方为单作用调节阀,调节阀上装有位移传感器。
对整个系统进行现场调试,气源压力7.0 MPa,经减压阀稳定至5.0 MPa。首先进行一次自整定确定相关参数,执行器选择单作用,信号制式选择4~20 mA。在对各个附加功能进行验证后对其控制性能进行测试,每隔15 s依次将阀门从关闭打开至25%,50%,75%的开度,再依次减小开度至关闭。根据实测数据绘制控制曲线如图10所示。可以看出,本定位器调节十分迅速,调节时间在5 s内,控制精度在0.5%以内。将电源电压升至26.4 V、降至21.6 V再进行两组测试,得到相似结果,说明在电源波动10%以内控制效果不变。

6 结 论
本文设计了一种多功能智能阀门定位器,对系统软硬件构成进行了详细阐述。经测试,系统各项功能正常,控制效果满足要求。笔者完成的工作达到预期目标,设计的智能阀门定位器可以广泛应用于实际系统,且成本较低、可靠性高,可获得可观的经济效益。
参考文献
[1] 王再英,刘淮霞,陈毅静.过程控制系统与仪表[M].北京:机械工业出版社,2006.
WANG Zaiying, LIU Huaixia, CHEN Yijing. Process control system and instrument [M]. Beijing: China Machine Press, 2006.
[2] 尚群立,蒋鹏.智能电气阀门定位器的研制[J].仪器仪表学报,2007,28(4):718?721.
SHANG Qunli, JIANG Peng, Research on intelligent electro?pneumatic valve positioner [J]. Chinese journal of scientific instrument, 2007, 28(4): 718?721.
[3] YUZAWA S, OOTSUKA K, NAGATA M, et al. New smart valve positioner with advanced diagnostics for enhanced safety of plant operations [C]// Proceedings of 54th Annual Conference of the Society of Instrument and Control Engineers of Japan. Hangzhou: IEEE, 2015: 1023?1028.
[4] 王洪庆.基于微控制器的智能阀门定位器控制系统的设计[J].仪表技术与传感器,2010(10):92?94.
WANG Hongqing. Design of intelligent valve locator control system based on MCU [J]. Instrument technique and sensor, 2010(10): 92?94.
[5] 林慧.智能电气阀门定位器的研究开发[D].天津:天津大学,2003.
LIN Hui. Research and development on smart electrical valve positioner [D]. Tianjin: Tianjin University, 2003.
[6] 于薇,董全林,张玉莲,等.基于MSP430单片机的阀位智能调节测控系统研究[J].现代电子技术,2015,38(23):94?97.
YU Wei, DONG Quanlin, ZHANG Yulian, et al. Study on MSP430 SCM based measurement and control system of valve intelligent regulation [J]. Modern electronics technique, 2015, 38(23): 94?97.
[7] 蔡明,白雪莲,章英.国产新型智能阀门定位器的设计[J].自动化仪表,2011,32(7):73?75.
CAI Ming, BAI Xuelian, ZHANG Ying. Design of new type of domestic smart valve positioner [J]. Process automation instrumentation, 2011, 32(7): 73?75.
[8] 刘会森,董全林,丁莹,等.基于HART协议智能阀门定位器的研究[J].现代电子技术,2016,39(15):160?163.
LIU Huisen, DONG Quanlin, DING Ying, et al. Study on intelligent valve positioner based on HART protocol [J]. Modern electronics technique, 2016, 39(15): 160?163.
[9] 鲍鹤,虎恩典,周朋,等.电厂用低功耗阀门定位器的研制[J].液压与气动,2016(6):78?83.
BAO He, HU Endian, ZHOU Peng, et al. Development of low power valve positioner for power plant [J]. Chinese hydraulics & pneumatics, 2016(6): 78?83.
[10] 李朋宪.智能阀门定位器的开发[D].重庆:重庆理工大学,2014.
LI Pengxian. Development of intelligent valve positioner [D]. Chongqing: Chongqing University of Technology, 2014.
[11] 赵明南,杨金堂,夏中愈,等.智能阀门定位器控制方法的研究[J].机床与液压,2015,43(2):141?144.
ZHAO Mingnan, YANG Jintang, XIA Zhongyu, et al. Research on the intelligent valve positioner control method [J]. Machine tool & hydraulics, 2015, 43(2): 141?144.
[12] 李鸣,周天龙,黄晓刚.基于PROFIBUS?DP的智能阀门定位器设计[J].仪表技术与传感器,2011(2):71?73.
LI Ming, ZHOU Tianlong, HUANG Xiaogang. Design of intelligent valve positioner based on PROFIBUS?DP [J]. Instrument technique and sensor, 2011(2): 71?73.
