基于蜻蜓算法的PID控制器参数优化
2018-06-12李小魁黄全振黄明明
李小魁 黄全振 黄明明
摘 要: 为了解决传统PID参数优化方法易出现费时、震荡且不能保证所调参数最优的问题,提出一种基于蜻蜓算法的PID控制参数优化方法,该方法利用蜻蜓群体寻找食物的过程并以误差性能指标ITAE作为其适应度函数实现PID控制参数的优化。通过仿真实验,并与粒子群优化算法、人工蜂群算法、布谷鸟搜索算法等常用的PID参数整定方法进行比较,结果表明,基于蜻蜓算法优化的PID控制器具有更优的控制性能。
关键词: 蜻蜓算法; PID控制器; 参数优化; ITAE; 控制性能; 反馈控制策略
中图分类号: TN876?34; TP18 文献标识码: A 文章编号: 1004?373X(2018)12?0102?06
Abstract: To solve the problems of time?consuming, vibration, and inability to guarantee the adjusted parameters optimal in the traditional PID parameter optimization method, a PID control parameter optimization method based on dragonfly algorithm is proposed. In the method, the PID control parameters are optimized by using the process of dragonfly population searching for food and taking the error performance indicator ITAE as the fitness function. The simulation experiment results show that, in comparison with the common PID parameter tuning methods such as particle swarm optimization algorithm, artificial bee colony algorithm, and cuckoo search algorithm, the PID controller based on dragonfly algorithm optimization has a better control performance.
Keywords: dragonfly algorithm; PID controller; parameter optimization; ITAE; control performance; feedback control strategy
0 引 言
PID控制器是最早提出的反饋控制器之一[1],在工业控制领域,有超过95%的反馈回路部件使用的是PID控制器,然而由于PID控制本质是一种线性控制规律,在实际工业应用中对于一些非线性、高阶、时滞的复杂系统,常规的PID控制效果并不能满足生产要求。因此,PID控制器的参数优化一直是控制理论研究的一个重要课题。
蜻蜓算法(Dragonfly Algorithm,DA)[2]源于自然界中蜻蜓捕食、迁徙和躲避外敌的群体行为,实现对目标函数的优化。该算法不仅具有粒子群算法的个人认知和社会认知能力,同时结合了布谷鸟算法[3]中[Le′vy]飞行行为,在算法寻优过程中能够有效避免陷入局部最优,提高算法的搜索性能。本文将蜻蜓算法用于PID控制器参数优化,基本思路是将PID控制器待优化的参数作为蜻蜓个体的位置信息,并以误差性能指标ITAE作为其适应度函数,利用蜻蜓群体寻找食物的过程实现对PID控制参数的优化。并选取7类工业控制中的典型控制模型,通过Matlab对各系统进行仿真实验,并与粒子群算法[4?6]、人工蜂群算法、布谷鸟搜索算法等几种常用的PID参数优化方法进行比较。实验结果表明,利用蜻蜓算法优化的PID控制器对各控制模型均具有很好的控制性能。

1 PID控制器
PID控制器的规律为:
4.3.2 20次独立运行整定结果对比
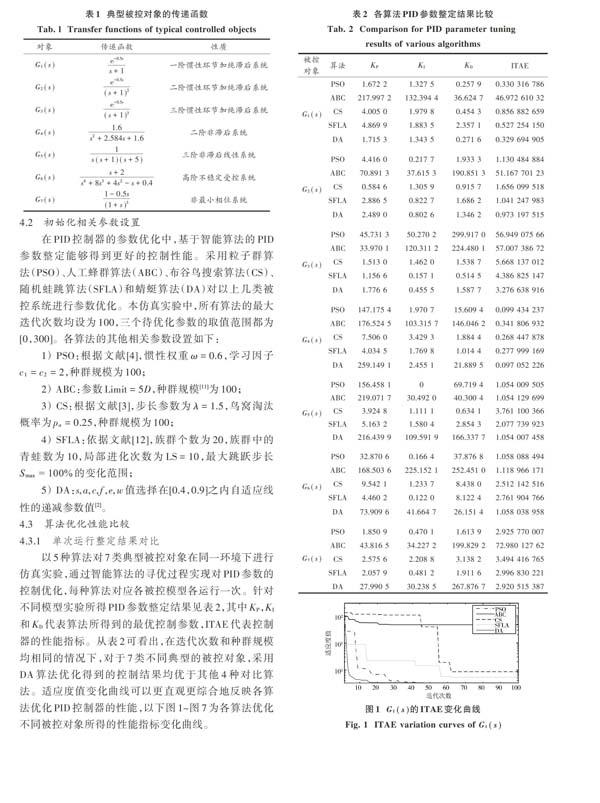
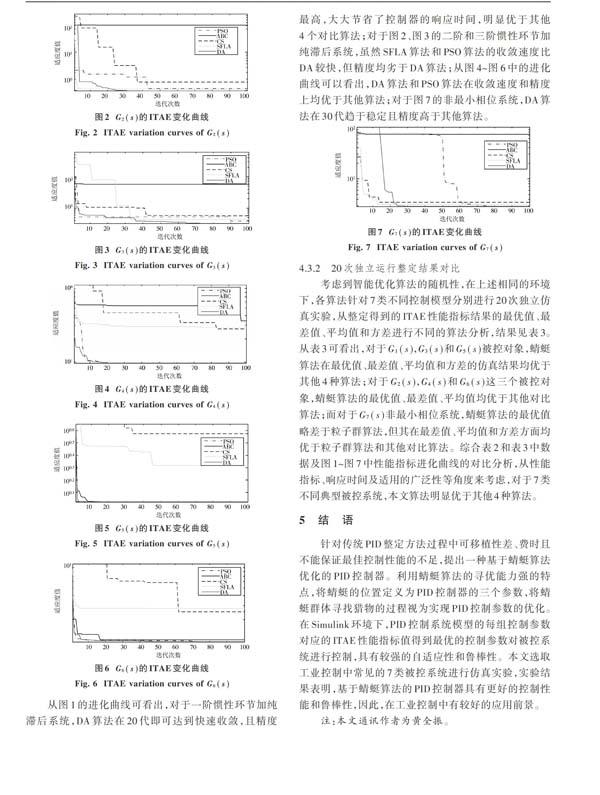
考虑到智能优化算法的随机性,在上述相同的环境下,各算法针对7类不同控制模型分别进行20次独立仿真实验,从整定得到的ITAE性能指标结果的最优值、最差值、平均值和方差进行不同的算法分析,结果见表3。从表3可看出,对于[G1(s)],[G3(s)]和[G5(s)]被控对象,蜻蜓算法在最优值、最差值、平均值和方差的仿真结果均优于其他4种算法;对于[G2(s)],[G4(s)]和[G6(s)]这三个被控对象,蜻蜓算法的最优值、最差值、平均值均优于其他对比算法;而对于[G7(s)]非最小相位系统,蜻蜓算法的最优值略差于粒子群算法,但其在最差值、平均值和方差方面均优于粒子群算法和其他对比算法。综合表2和表3中数据及图1~图7中性能指标进化曲线的对比分析,从性能指标、响应时间及适用的广泛性等角度来考虑,对于7类不同典型被控系统,本文算法明显优于其他4种算法。
5 结 语
针对传统PID整定方法过程中可移植性差、费时且不能保证最佳控制性能的不足,提出一种基于蜻蜓算法优化的PID控制器。利用蜻蜓算法的寻优能力强的特点,将蜻蜓的位置定义为PID控制器的三个参数,将蜻蜓群体寻找猎物的过程视为实现PID控制参数的优化。在Simulink环境下,PID控制系统模型的每组控制参数对应的ITAE性能指标值得到最优的控制参数对被控系统进行控制,具有较强的自适应性和鲁棒性。本文选取工业控制中常见的7类被控系统进行仿真实验,实验结果表明,基于蜻蜓算法的PID控制器具有更好的控制性能和鲁棒性,因此,在工业控制中有较好的应用前景。

注:本文通讯作者为黄全振。
参考文献
[1] ABACHIZADEH M, YAZDI M R H, YOUSEFI?KOMA A. Optimal tuning of PID controllers using artificial bee colony algorithm [C]// Proceedings of IEEE/ASME International Conference on Advanced Intelligent Mechatronics. Montreal: IEEE, 2010: 379?384.
[2] MIRJALILI S. Dragonfly algorithm: a new meta?heuristic optimization technique for solving single?objective, discrete, and multi?objective problems [J]. Neural computing & applications, 2016, 27(4): 1053?1073.
[3] 王庆喜,储泽楠.基于动态布谷鸟搜索算法的PID控制器参数优化[J].计算机测量与控制,2015,23(4):1215?1217.
WANG Qingxi, CHU Zenan. Parameters optimization of PID controller based on dynamic cuckoo search algorithm [J]. Computer measurement & control, 2015, 23(4): 1215?1217.
[4] 杨智,陈志堂,范正平,等.基于改进粒子群优化算法的PID控制器整定[J].控制理论与应用,2010,27(10):1345?1352.
YANG Zhi, CHEN Zhitang, FAN Zhengping, et al. Tuning of PID controller based on improved particle?swarm?optimization [J]. Control theory & applications, 2010, 27(10): 1345?1352.
[5] 胡伟,徐福缘.基于改进粒子群算法的PID控制器参数自整定[J].计算机应用研究,2012,29(5):1791?1794.
HU Wei, XU Fuyuan. Self?tuning of PID parameters based on improved particle swarm optimization [J]. Application research of computers, 2012, 29(5): 1791?1794.
[6] 熊伟丽,徐保国,周其明.基于改进粒子群算法的PID参数优化方法研究[J].计算机工程,2005,31(24):41?43.
XIONG Weili, XU Baoguo, ZHOU Qiming. Study on Optimization of PID parameter based on improved PSO [J]. Computer engineering, 2005, 31(24): 41?43.
[7] 郑坤明,张秋菊.基于弹性动力学模型与遗传算法的Delta机器人模糊PID控制[J].计算机集成制造系统,2016,22(7):1707?1716.
ZHENG Kunming, ZHANG Qiuju. Fuzzy PID control of delta robot based on elastic dynamic model and genetic algorithm [J]. Computer integrated manufacturing systems, 2016, 22(7): 1707?1716.
[8] WIKELSKI M, MOSKOWITZ D, ADELMAN J S, et al. Simple rules guide dragonfly migration [J]. Biology letters, 2006, 2(3): 325?329.
[9] 李远梅,张宏立.基于改进萤火虫算法PID控制器参数优化研究[J].计算机仿真,2015,32(9):356?359.
LI Yuanmei, ZHANG Hongli. Optimization of PID controller parameters based on improved glowworm swarm algorithm [J]. Computer simulation, 2015, 32(9): 356?359.
[10] 曾成,趙锡均.改进量子遗传算法在PID参数整定中应用[J].电力自动化设备,2009,29(10):125?127.
ZENG Cheng, ZHAO Xijun. Application of improved quantum genetic algorithm in PID parameter tuning [J]. Electric power automation equipment, 2009, 29(10): 125?127.
[11] 蔡超,周武能.人工蜂群算法整定PID控制器参数[J].自动化仪表,2015,36(8):74?77.
CAI Chao, ZHOU Wuneng. Self?tuning PID parameters by using artificial bee colony algorithm [J]. Process automation instrumentation, 2015, 36(8): 74?77.
[12] HUYNH T H. A modified shuffled frog leaping algorithm for optimal tuning of multivariable PID controllers [C]// Proceedings of IEEE International Conference on Industrial Technology. Chengdu: IEEE, 2008: 1?6.
