汽轮机水位优化控制探讨
2018-06-07洪丽格
洪丽格
(福建省三钢(集团)有限责任公司, 福建 三明 365000)
引言
福建省三钢(集团)有限责任公司(以下简称“三钢”)是长流程生产的钢铁企业,其焦炉、高炉、转炉生产过程中均产生煤气。在满足各道生产工序正常运行的同时,三钢煤气大量富余。为了减少煤气放散对大气的污染,三钢建设锅炉和汽轮发电机组消耗煤气,生产清洁的电力能源自用。目前三钢集团本部自发电比例达50%以上。
三钢2号发电机组是三钢投产的第一批发电机组。这台发电机组为凝汽式汽轮机与15 MW发电机联机运行,采用欧姆龙控制系统。为确保机组安全运行,发电机组设有多项联锁停机参数,如超速、推力瓦温高、轴向位移大、排汽温度排汽压力异常等,如图1。
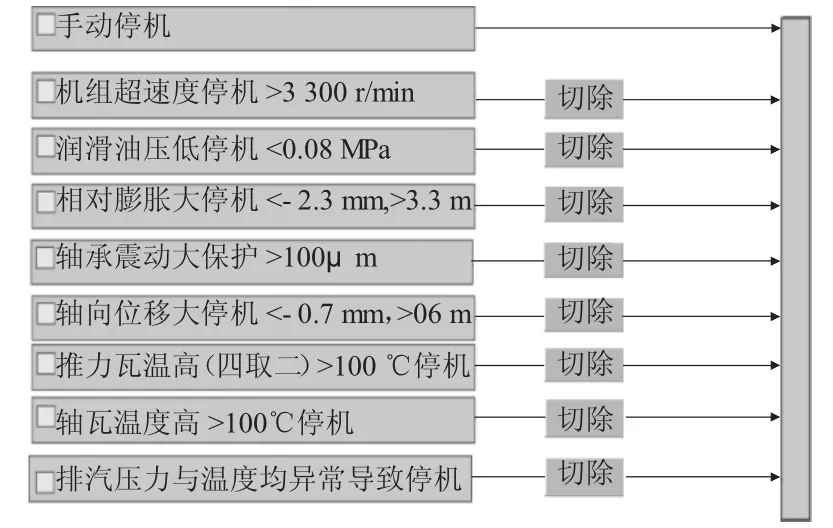
图1 2号发电机组连锁系统
1 三钢2号发电机组运行存在的问题
随着三钢产能的增加,生产节奏加快,各道工序煤气产生和消耗变得不平衡,导致煤气管网压力变化大。为了平衡煤气管网压力,三钢煤气柜通过吞吐煤气,可瞬时平衡煤气管网压力,但最主要的煤气平衡“调节者”是自备电厂的锅炉和发电机组。三钢2号发电机组是煤气调峰的主力,运行负荷通常在6~14 MW区间调整,波动大。负荷频繁大幅度变化,2号发电机组汽轮机部分出现了轴振动变大、推力瓦温升高、水位自动调节困难等问题。最为突出的是负荷调整时汽轮机的进汽短时间内激增或骤降,凝结器热水井水位波动异常,因热水井水位自动控制跟踪不及时,引起汽轮机排汽温度和排汽压力异常连锁停机。每次停机到机组恢复正常运行都需要3~4 h,每年因此停机2~3次,经济损失大。
2 汽轮机排汽温度和排汽压力异常的原因分析
首先了解汽轮机凝汽器热水井水位控制原理,见图2。
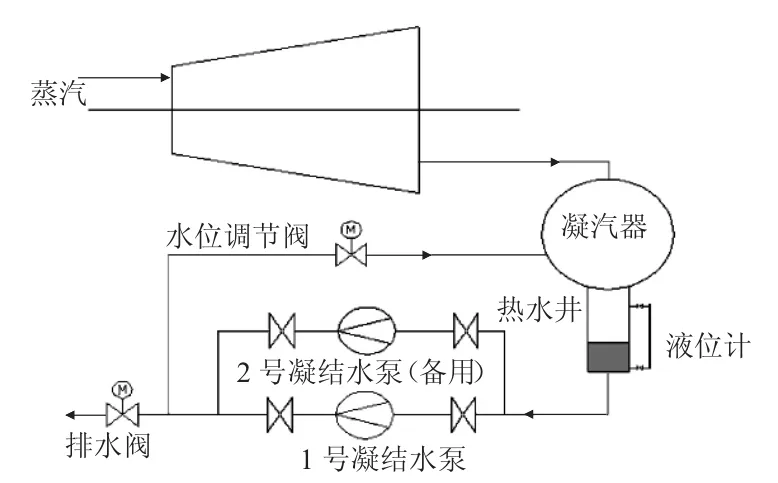
图2 热水井水位控制示意图
汽轮机凝汽器是为了冷却做完功未液化的蒸汽,保持凝汽器内一定的负压(真空度),使进入汽轮机的蒸汽流动顺畅,不易引起汽缸温度升高,凝汽器运行正常既保证机组安全运行,又能保证蒸汽做功效率。
汽轮机做完功的乏汽经凝汽器冷却后液化进入热水井。热水井内的水通过凝结水泵泵出,一部分水通过“排水阀”排出,另一部分水通过再循环管“水位调节阀”回到热水井,调节热水井水位。热水井水位过高会影响乏汽的冷凝,而水位过低则容易使空气进入凝汽器,都会造成汽轮机真空恶化,影响汽轮机运行效率和安全。生产运行过程中,为了控制热水井水位平稳,应将热水井水位与排水阀和水位调节阀联动,实现电脑自动控制:当汽轮机进汽量增大后,凝汽器热水井水位开始上升,系统将实际水位与设定水位进行比较,发现水位升高,发送指令开大“排水阀”、关小“水位调节阀”,排出凝结水,使热水井水位回到设定值,水位控制是一个不断跟踪、比对、反馈、调节的过程。
如果汽轮机发生排汽温度和排汽压力异常连锁停机,主要由以下几个原因造成:凝汽器密封装置故障漏空气,影响凝汽器真空,导致停机;中控系统自动控制异常,导致停机;热水井水位测量不准、系统控制出现偏差,导致满水停机;排水阀和水位控制阀(机械或电路板)故障,阀门无法正常动作,导致停机。
通过调阅2号发电机组热水井水位历史曲线,发现当汽轮机进汽量大增时,热水井水位快速上升,水位自动控制系统也开始起作用,开大排水阀门,关小水位控制阀门进行排水,因为汽轮机凝结水瞬时增加量大,虽然系统持续跟踪、调节,但是热水井内进出水量还未达到平衡,此时热水井水位继续上升,当水位上升到900 mm(水位计满量程)以后约1 min,中控系统接收到的水位计输出信号突变为0(空水位),使得水位控制系统朝反方向调节——关闭排水阀门,打开水位调节阀,使得热水井水位持续升高,最终导致汽轮机排汽温度和排汽压力异常停机。
2号发电机组热水井水位测量仪表采用导波雷达。导波雷达输出信号4~20 mA对应热水井水位高度为0~900 mm,测量输出是整个水位逻辑控制第一步,所以故障排查从热水井的水位测量仪表——导波雷达开始。监盘操作人员先把热水井水位控制调整至人工控制,隔离水位逻辑控制。仪控人员在导波雷达输出回路串联一个万用表观测导波雷达输出信号与水位变化之间的关系。通过实际测量发现导波雷达在水位量程设定范围内其输出信号正常,即输出的电流信号与水位变化成对应关系,但当热水井水位超过导波雷达测量量程900 mm并持续升高后,其输出电流信号突变为4 mA,在电脑显示热水井水位为“0”空水位,但实际上这时的热水井是满水状态。经过反复确认,导致控制系统在满水情况下显示“0”水位的问题是当水位高于导波雷达量程后,导波雷达输出信号异常。
导波雷达的测量原理:导波雷达是利用电磁波反射测量原理的智能测量仪表。导波雷达测量时,先发出电磁脉冲信号,当脉冲抵达所要测量的液体表面时,部分脉冲被反射并返回变送器,变送器接收脉冲后,将产生的脉冲和反射接收到的脉冲之间的时差换算成距离,从而来计算液面高度。但是导波雷达存在测量盲区,当实际水位超过测量参考点就进入了导波雷达的顶部盲区,就会出现脉冲信号反射异常,导致导波雷达测量误差大,输出信号与实际不符的情况。
通过分析导波雷达的测量原理及后期测试证实,当热水井水位超出导波雷达的有效测量量程,导波雷达输出信号与实际水位不符。
3 解决水位测量仪表输出假信号的措施
3.1 方案一:增大导波雷达有效测量程
通过翻阅说明书,仪控人员可以通过修改导波雷达的参数设置,将其盲区改小,增大有效测量范围。但是在热水井水位超过导波雷达测量范围,且水位持续上升的过程中还是容易到达测量盲区,造成测量误差,影响汽轮机正常运行,所以该方案不可行。
3.2 方案二:更换热水井水位测量仪表
部分技术人员提出将水位测量仪表更换为差压变送器。差压变送器具有测量原理简单、安装方便、价格便宜等优点,其在敞口容器的水位测量应用较多。通过资料分析对比,用差压变送器测量热水井水位存在以下问题:第一,因为热水井内为负压,差压变送器测量不稳定,且气密性较差,真空容器对系统的气密性要求很高,差压变送器在以往电厂中的应用效果并不理想。相对于差压变送器、导波雷达在严密性要求比较高的真空容器——凝汽器内应用更好。第二,若更换热水井水位测量仪表,需停机对热水井测量点进行重新开口,连接导压管,时间较长,在生产节奏快、整个厂煤气压力波动大的实际情况下,2号发电机组作为煤气调峰“主力”不具备长时间停机的可能。综合以上因素,方案二也不可行。
3.3 方案三:修改水位控制逻辑
针对三钢生产实际,在2号发电机机组不停机的情况下,通过在上位机修改控制系统的热水井水位控制逻辑,再从上位机下载至工况机。
2号发电机组水位控制程序增加以下逻辑(见下页图3):当水位显示低于110 mm,且蒸汽流量大于8 t/h时,水位信号强制为满水位(900 mm);当水位显示低于850 mm时,显示实际水位。为避免汽轮机启动前,热水井注水时实际低水位被强制为满水位,增加一个蒸汽流量大于8 t/h的参数指标。
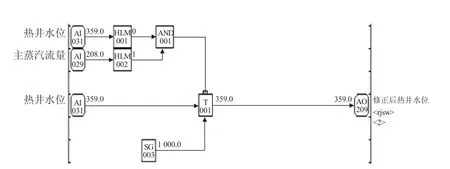
图3 控制系统中增加的判断逻辑
热力2号发电机组水位控制程序修改后,在实际运行中避免了凝结器热水井水位测量缺陷造成凝结器水位高时出现假水位的现象。同时通过岗位劳动竞赛等方式,加强岗位操作人员绩效考核和异常考核,提高岗位操作人员的积极性和主动性,利用能源管理系统提前预判管网压力,及时调整发电机组负荷。通过技术和管理上的措施,三钢2号发电机组因水位计输出虚假信号引起停机的情况没有再发生,大大提高设备运行的安全性和稳定性。