海上人员传送技术及维修船运动响应研究
2018-06-05孙海莹郑向远李邦华
孙海莹,郑向远,黄 一,高 山,李邦华
(1.大连理工大学 船舶工程学院,辽宁 大连 116024;2.清华大学 深圳研究生院 海洋科学与技术学部,广东 深圳 518055)
0 引 言
在全球能源和环境问题日益突出的今天,风能作为可再生能源代表,逐渐受到世界各国广泛关注[1]。海上风电代表着风电技术领域的前沿和制高点,是世界上主要风电市场重点关注的发展方向,也是我国战略性新兴产业的重要内容[2]。海上风电设备结构更加复杂,所处环境更加恶劣,相比于陆上风电,海上风电发展时间短,积累经验不足,在建造和维护过程中存在着更大的挑战[3]。因此,随着我国海上风电规模不断扩大,发展可靠的人员传输方案,提高风场维护效率,减少维护等待时间,降低风场维修成本是十分必要的。
1 中国海上风电发展现状
截止到2014年底,全球超过91%(8 045.3MW)的海上风电装机容量集中在欧洲海域,主要分布在北海(5 094.2MW:63.3%),大西洋(1 808.6MW:22.5%)以及波罗的海(1 142.5MW:14.2%)[1]。世界其他国家和地区也正在加紧建设海上风电的步伐。
中国2014年海上风电新增装机容量为229MW,规模仅次于英国和德国,累计装机容量达到657.88MW,位居世界第五位。
根据各地规划,“十二五”及2020年前重点规划建设上海的东海大桥、南汇、奉贤,江苏的南通、盐城南北部、连云港,山东的莱州湾、渤中、长岛、半岛北海和半岛南海,河北的唐山、沧州,广东的粤东、粤西、珠三角,浙江的杭州湾、舟山东部、象山、台州、温州,辽宁的瓦房店、花园口、庄河等海域的海上风电项目。
中国政府提出,到2015年规划建设5GW海上风电,到2020年规划建设30GW海上风电。2014年8月,国家能源局列出44个海上风电项目计划共计10.53GW,到12月计划最终又增加了250MW。从目前看,这些目标都尚未实现,资金、政策和技术层面都存在一定问题。
2 海上人员运输相关问题研究回顾
Morrison[4]分析了海上风电需要频繁人员登陆检修的原因,指出维修人员在风机的建造、调试、测试以及操作和维修期间需要在风机结构上工作。在必要的维修电气故障过程中,也会有大量的海上人工介入来维修风机结构。
Morrison[4]还分析了采用船舶运输和直升飞机运输人员的优缺点。采用船舶运输:优点是价格便宜,缺点是速度慢、舒适度差、受海况因素限制较多、人员登陆较危险、靠近风机时需精准定位,操作难度大容易与结构发生碰撞。采用直升飞机运输:优点是速度快、不受波浪等海况的限制、人员登陆的时候更安全。缺点是仅在能见度好的时候可以工作、按小时计算租金,价格昂贵、有风速限制;此外,还需要飞行员具备高超的驾驶能力,以避免与风轮相撞。
Van Bussel和Bierbooms[5]研究了维修人员登陆海上风机时面临的困难并给出了采用不同方式登陆风机的可到达率。采用Monte Carlo仿真方法估算海上风机的可到达率,结果显示以荷兰的DOWEC海上风场为例,若仅仅使用船舶运输维修人员,则可到达率不超过90%。
Hofmann和Sperstad[6]提出了一种新的评判模型NOWIcob(Norwegian offshore wind cost and benefit model),用来评估不同操作和维修策略对于海上风场整个生命周期成本的影响。该评判模型可用来帮助减少海上风场的建设和维修成本。
Marsh[7]分析了复合材料在海上风电维修船上的应用前景。双体运输船的船体若采用复合材料,其优点有:重量轻、横摇小、碳排放量小、速度快、水动力性能好、没有金属腐蚀、减少疲劳和声隔离性能好等。但同时也存在一定的缺点:若与风机相撞,后期的维修时间长(复合船维修时间:3个月,铝制船维修时间:2个星期)。
3 海上人员运输工具简介
在海上进行人员传送时,通常需先将人员送至海洋结构附近,再通过相关的技术方法使人员登陆到结构上。
海上人员运输工具包括:大型维修船、小型人员运输船、专门针对人员登陆而开发的特殊船舶以及直升飞机。大型维修船用来运输大型设备,在风场建设初期用途很大。小型人员运输船则适合风场运营阶段的维修和检测工作。特殊船舶则是针对风浪联合作用下人员难以登陆这一问题而专门设计的。比如:Mobimar公司专门设计了三体船型的Mobimar 18 Wind人员运输船,可以在4 m有义波高营运,可以在2.5 m有义波高完成人员传送[8]。Vanishing Point,可在1.7 m波高的位置与结构连接而毫无相对运动[9]。Ocean Wind Marine LTD公司以英格兰东北海岸为基础设计的双体船,可以在波高2-3 m的环境中工作[10]。AUSTAL公司计划开发一种三体船,工作海域为所有欧洲国家的海域,船长27.4 m,船宽10.5 m,可运载12名维修人员和3名船员,服务航速23节,设计有义波高为3 m[11]。直升飞机是最快捷的人员运输方式,但是价格极其昂贵,并不是理想的选择。
在众多船型中,单体船速度慢,稳定性较差;三体船建造工艺复杂,价格昂贵。因此小型双体客船是短途海上人员运输过程中的主要船型,尤其是在风场进入正常运营阶段以后。从欧洲一些船舶公司数据来看,海上风场人员运输船船型以双体船为主,价格区间为20~55万英镑。
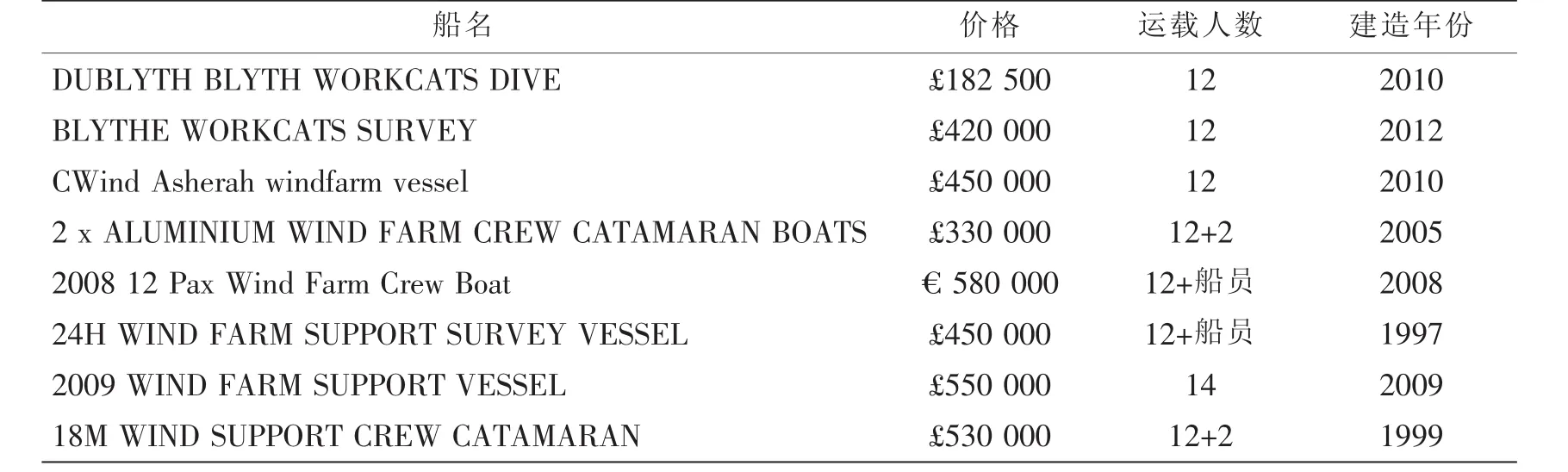
表1 部分人员运输船价格[12]Tab.1 Prices of crew transfer vessels
4 海上人员登陆技术发展现状
靠船登陆技术包括:吊篮、起吊机、固定抓紧装置、通道/悬梯以及液压设备。
这些登陆技术各自有其自身的优缺点和适用范围,在工程实际中,通常根据传送人数、设备大小和数量、海况、海上结构的形式等多种因素选择合适的运输工具,搭配登陆技术,确定合理的人员传送方案,以保证传送效率和安全性。

图1 各种登陆技术Fig.1 Types of personnel transfer systems
目前海上人员传送方式主要有以下几种:吊升式人员传送、固定抓紧式传送、通道悬梯类传送以及其他形式的传送。
4.1 吊升式人员传送
吊升传送是最原始的海上人员传送方式,吊升传送需要有吊篮和起吊机配合。
4.1.1 吊篮
吊篮的发展经历了折叠网到刚性吊网,到刚性吊篮的发展过程。

图2 折叠网Fig.2 Collapsible net

图3 刚性吊网Fig.3 Rigid basket

图4 刚性吊篮Fig.4 Rigid capsule
英国LHR Marine公司[13]研发了多种型号的折叠网。传送时人员站立在折叠网外面,用手抓住折叠网,这种非刚性的折叠网极不稳定,如图2所示。
英国Seaway Heavy Lifting公司[14]研发了刚性的吊网,虽然刚性骨架起到了保护的作用,但这种吊网也是一种人员站立式结构,极不安全,如图3所示。
英国Reflex Marine公司[15]研发了更为先进的人员坐立式刚性吊篮,它的不锈钢骨架和浮体结构可提供浮力和自动扶正功能,比之前的结构更加安全,如图4所示。
4.1.2 起吊机
采用吊篮传送人员需要起重机配合。德国PTS公司[16]专门针对海上人员登陆设计一款双臂液压吊杆起重机(图5),并于2008年完成全部海上试验。
PTS起重机通过无线电遥感控制,可以保证船舶与结构物之间有5 m的安全距离。该起重机有效地解决了船舶甲板与海上结构物甲板高度差的问题:当传送重量小于500 kg时,可提升的高度是15 m;当传送重量超过500 kg时,安全的提升高度为8 m。
PTS起重机需安装在每个海洋结构上,在结构正常运营阶段,起重机的利用率低,浪费严重。此外,将人员送回船舶甲板的过程难度更大,人员在平台甲板着陆的时候无法配合船舶的运动,存在危险,易受伤。
吊升传送方式极不安全,已经不被广泛采用,仅在当船舶甲板与海上结构的甲板高度差距过大的时候,采用该方法传送人员。吊篮的发展则经历了折叠网到刚性吊网,到刚性吊篮的发展过程。
4.2 固定抓紧式传送
4.2.1 Mobimar 18 Wind人员运输船

图5 PTS起吊机Fig.5 PTSCrane
Mobimar公司是芬兰的一家船厂,该公司曾推出一种人员运输船Mobimar 18 Wind(图6)。该船采用三体船船型,在船艏安装了独特的夹具结构。该船可以在4 m有义波高营运,可以在2.5 m有义波高完成人员传送,登陆角度达到180°,每次可运送12名旅客[17]。
虽然Mobimar 18 Wind优势很多,但由于是针对人员登陆专门设计的船舶,用途单一;且采用三体船型,建造成本高。若使用该船,将会显著增加风场的维护成本。
4.2.2 MaXccess T-series人员传送系统
MaXccess系统(图7)是发展成熟的人员传送系统。该系统经历了系统完善的发展过程,其设计已经得到了劳氏船级社的认可,设计和操作方面有着大量的安全记录证明[18]。
MaXccess T-series系统由英国OSBIT POWER公司开发,有两个型号:MaXccess T12和MaXccess T18。MaXccess T12用于长度小于18 m的船舶;MaXccess T18用于长度大于18 m的船舶。
MaXccess系统可以迅速夹在风机基础的附属钢结构上,限制了船艏的垂直和水平方向的运动,但允许船舶横摇、纵摇和艏摇,因此波高对人员传送的限制依然很大。
2011年10月和2012年3月,MaXccess系统分别完成了码头试验和海上试验。其中,海上试验持续9天,MaXccess系统夹在风机缓冲柱上的总时间超过12个小时,共完成36次人员传送,试验可在1.9 m有义波高下安全进行[19]。
MaXccess T12和MaXccess T18的主要性能参数如表2所示。

图6 Mobimar 18 Wind人员运输船Fig.6 Mobimar 18 wind personnel transport ship
图7 MaXccess系统测试中Fig.7 MaXccess system in testing
4.2.3 Houlder-TASTM人员传送系统
英国的Houlder公司和BMT Nigel Gee公司针对无动力定位系统的船舶,联合设计开发了一种叫做TASTM的人员登陆系统(图8)。TASTM是一种具有专利的动态补偿平台,系统末端安装了滚轮,通过滚轮与海上风电机塔架摩擦力来抑制船体的晃动。该系统主体结构材料为船用铝合金,结构重量较小[20]。

图8 Houlder-TASTM系统Fig.8 Houlder-TASTM system
2012年的夏天,TASTM系统首次在南安普敦举行的海上作业展览会上公开亮相[20],此后在第27届Offshore Achievement Awards获得了安全革新奖(Safety Innovations Award)[21]。2012年,TASTM系统进行了试验,试验结果表明该系统可保证在有义波高1.8 m下人员运输安全。TASTM系统能够抵御垂向+/-1.5 m,船舷角度为+/-25°的位移[22]。2014年6月,TASTM系统又进行了一系列试验,结果表明该系统更加安全[23]。
4.3 通道悬梯式传送
4.3.1 MaXccess P-series人员传送系统
OSBIT Power公司与Tyne Gangway公司联合为海上人员传送开发了MaXccess P-series通道系统,产品分为4个型号:MaXccess P25、MaXccess P35(图 9)、MaXccess P40 和MaXccess P45.5。MaXccess P-series的工作原理是:首先通过人工操控,将系统搭在目标结构上;之后系统根据船舶的运动可以自由伸展、缩短、倾斜或转动,在六个自由度上主动或被动进行运动补偿。MaXccess P-series的主要性能参数如表3所示。

图9 MaXccess P35系统Fig.9 MaXccess P35 system

表3 MaXccess P-series主要性能参数Tab.3 Performance parameters of MaXccess P-series
4.3.2 Ampelmann人员传送系统
由荷兰Delft大学提供技术支持的Ampelmann公司,开发的人员传送系统Ampelmann系统有多个型号:A-type、E-type、L-type 和 O-type。 Delft大学在 2005 年初提出了Ampelmann系统的概念;随后进行了缩尺模型试验;2006年9月设计并建造示范系统;2007年夏季示范系统建成;2008年开始投入生产。记录表明[24]:Ampelmann系统(图10)可以在5个星期内完成7 000人次传送工作,比原计划提前3星期。
A-type可用来运输人员和小型设备。系统由自稳六足结构的六个液压柱组成,每个液压柱长2 m,可以补偿垂向运动2.5 m。E-type结构形式与A-type相似,但液压柱长度是A-type的1.5倍,系统整体结构更大,能够承受更恶劣的海况,工作海况可达到有义波高4 m。L-type是Amelmann系统中结构最小的,适用于小型无动力定位系统的人员运输船,运输更加快捷高效。O-type是针对平稳海况下的大型人员运输船设计的,它没有使用六足液压杆结构,而是使用运动补偿技术。系统仅搭在平台上,船舶以低功率运营,处于自由漂浮状态。O-type可以长时间工作,保持与结构连接数个小时甚至几天的时间。

图10 Ampelmann A-type系统Fig.10 Ampelmann A-type system
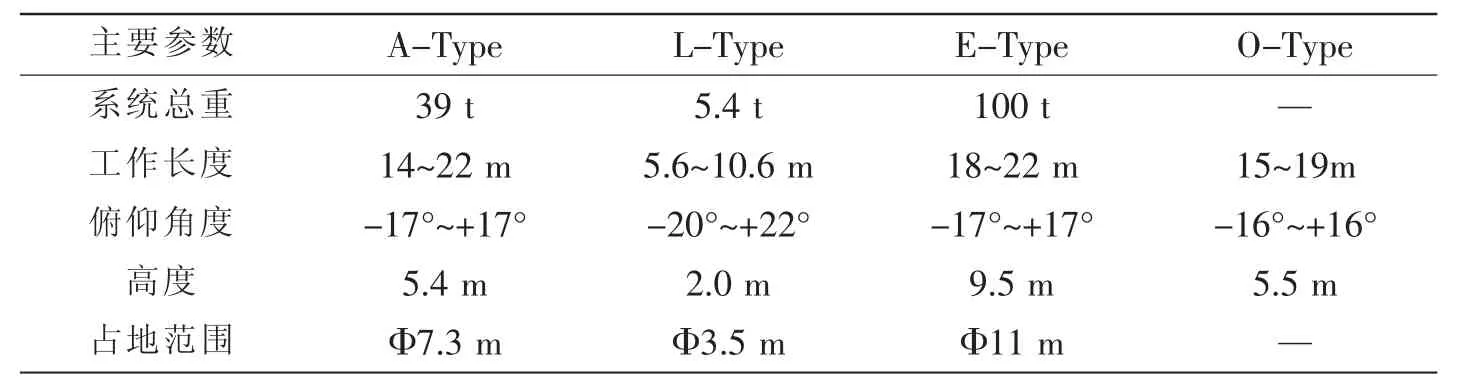
表4 Amepelmann系统的主要性能参数Tab.4 Performance parameters of Amepelmann Systems
截止2014年10月9日,超过35个Ampelmann系统在世界各风场工作,累计完成人员传送超过80 万人次[25]。
4.3.3 MOTS 1000/G人员传送系统
MOTS 1000/G是悬梯登陆系统[26](图11),设计安装在有动力定位系统的船上。MOTS 1000/G可以在有义波高3.5 m以下传送人员,垂向运动补偿最大4 m,总重量7.5 t,承载能力150 kg。MOTS 1000/G的主要性能参数如表5所示。

表5 MOTS 1000/G系统的主要性能参数Tab.5 Performance parameters of MOTS 1000/G

图11 MOTS 1000/G系统Fig.11 MOTS 1000/Gsystem
4.3.4 Houlder—Personnel Transfer System人员传送系统
Houlder公司针对有动力定位系统的船舶设计了一款人员传送系统(图12)。该系统的液压悬梯根据船舶的运动提供主动或被动的运动补偿,可保证人员在有义波高3 m时高效安全地登陆海上结构。系统重25 t,水平方向最远可到达23 m,回转角度360°,安全工作载荷350 kg,工作温度:-20°~+35°。系统工作时,对船舶运动的要求是:升沉运动:-5 m~+5 m,横荡纵荡:-1.5 m~+1.5 m,横摇纵摇:-6°~+6°,艏摇:-4°~+4°[27]。
4.4 其他形式传送
德国momac公司还开发了一种人员传送系统—MOTS 500[28](图13)。MOTS 500是针对无动力定位系统的船舶设计的高空作业笼系统,可补偿所有方向的船舶运动。MOTS 500总重量为3.4 t,承载能力150 kg,可以在有义波高2.5 m传送人员。该系统垂向运动补偿最大为3.2 m,当船舶垂向运动小于3.2 m的时候,系统可以保证人员传送安全。MOTS 500的主要性能参数如表6所示。
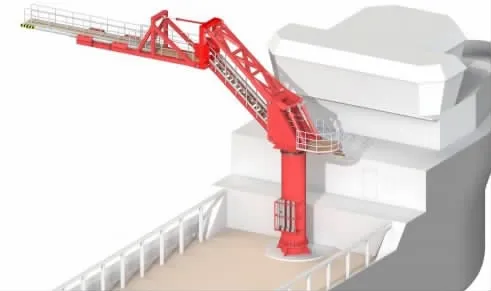
图12 Houlder Personnel Transfer系统Fig.12 Houlder Personnel Transfer system

表6 MOTS 500系统的主要性能参数Tab.6 Main performance parameters of MOTS 500 system

续表6
4.5 各种传送方式总结
现将以上各种传送系统的优缺点总结如表7所示。
从目前资料来看,有关海上风电维修船人员登陆系统的研究工作主要集中在欧洲国家,虽然已有关于登陆系统的研究,但是目前的登陆系统有各自不足之处,波高仍是限制人员登陆的主要因素。
在我国,海上风电产业正处于起步阶段,对于登陆系统的研究几乎空白。在未来几年,海上风电是我国重点发展的产业。然而,若没有成熟的维修技术作保障,海上风电的发展也将大大受到限制。登陆系统是人员登陆过程中最重要的一个环节,在该环节上自身发展落后或者在技术上受制于外国,将会给我国带来巨大的经济损失。因此,我们迫切地需要发展自己的海上风电维修事业,研发属于自己的登陆系统。

图13 MOTS 500系统Fig.13 MOTS 500 system
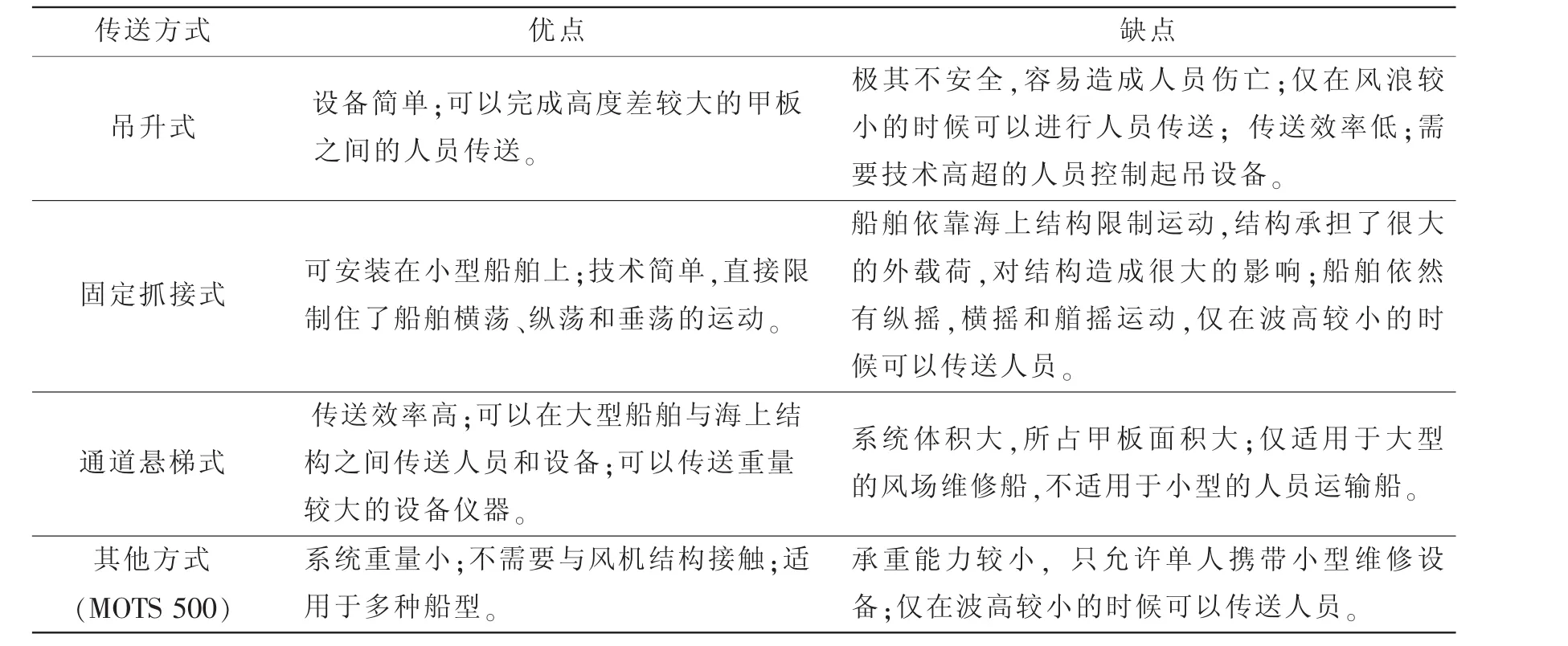
表7 各种传送系统优缺点总结Tab.7 Summary of merits and limitations of boat personnel transfer systems
5 人员运输船水动力性能分析
对于任何人员传送系统,其性能都和运输船的船体运动密切相关。因此本文以某双体客船为例,使用频域分析软件WAMIT,对人员运输船的水动力特性展开研究。需要注意的本文着重考虑运输船在接近海上风电机塔筒基础时的靠船运动,此时航速可假设为零。
本文中水动力计算部分使用的软件是WAMIT,WAMIT V6.0以上的版本可以使用基于B样条的高阶方法来表示结构物的几何外形以及求解结构物表面的速度势和压力。对比低阶方法,高阶方法能够节省大量计算时间并且结果更加准确。
5.1 本文中使用的模型
本文中使用的双体船模型为一高速双体客船,船长25.1 m,船宽8.8 m,吃水1.45 m,单个片体宽2.6 m,片体间距3.6 m。图14为该双体船的型线图。

图14 双体船型线图Fig.14 The catamaran’s drawing lines

图15 几何模型:双体船与双体之间的自由表面Fig.15 The catamaran geometric modeling and free surface between the two hulls
在建模方面,本文使用的是MultiSurf软件。MultiSurf可以直接与WAMIT建立连接,即MultiSurf中建立的几何模型可直接用于WAMIT的高阶方法计算。在MultiSurf中建模,只需建立出水线面以下结构的湿表面部分。
对于本文中的水动力计算模型,由于要考虑船舶靠近风机时的运动响应,因此需要建立双体船模型和风机模型,二者一动一静,在计算时考虑其相互作用。
对于双体船,两个片体之间有一大块水体,这部分水体会对双体船的水动力性能产生影响。因此在建模的时候,需在两个片体之间的液面建立自由液面,最终的双体船模型如图15所示,粉红色区域为自由液面。
风机模型采用单桩模型,风机水下部分化简成一个圆柱模型,直径为5 m。图16是在MultiSurf中建立的风机几何模型。
水深为15 m,同时考虑维修人员在登陆风机时,可能遭遇不同方向的波浪,因此浪向角设定为0°、30°、60°、90°、120°、150°和 180°。
双体船模型与风机模型位置关系的相对位置图如图17所示,在通常情况下,双体船采用船头正对基础的登陆方式,而非船舷紧贴桩基础。这里,假设船头距离风机基础表面为1 m。

图16 风机模型Fig.16 The wind turbine model

图17 模型的相对位置图Fig.17 Plan view of the relative placements of models
5.2 本文使用的波浪谱
通常情况下,在工程上描述海况时,仅仅考虑风浪的作用,即假设波浪谱是单峰谱(如:JONSWAP谱、PM谱等)。而在沿海地区时常还应该考虑风浪和涌浪的联合作用,此时应该使用双峰谱来描述海况,尤其在我国东南沿海和南海。
Torsethaugen谱是目前发展较好的一种7参数双峰谱,目前已被DNV规范收录使用[29]。对于未知海域,在多个参数未知的情况下,使用Torsethaugen谱是较佳选择。Torsethaugen谱考虑将风浪谱与涌浪谱叠加,公式如下:

其中)为涌浪谱,)为风浪谱。 各图谱如图18-21所示。
本文对人员登陆时船舶的运动响应进行了估算,分别采用了JONSWAP谱和Torsethaugen谱,并对两种谱的结果进行了对比。海况参数方面,结合本文中使用的小型人员运输船模型,有义波高Hs取2.5 m,谱峰周期Tp取6 s。图20是使用的Torsethaugen谱,图21是本文中使用的JONSWAP谱,其涌浪的周期为10.96 s,由经验公式确定[29]。
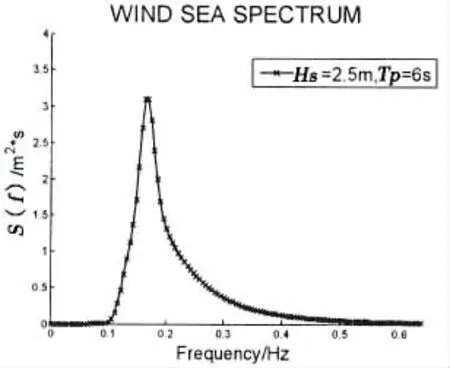
图18 风浪谱Fig.18 Wind sea spectrum
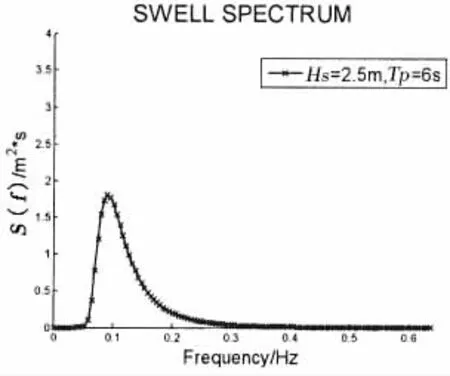
图19 涌浪谱Fig.19 Swell sea spectrum
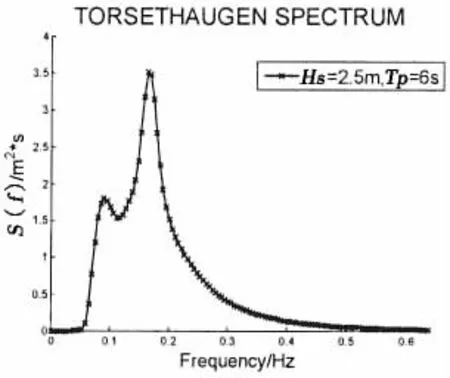
图20 Torsethaugen谱Fig.20 Torsethaugen spectrum
图21 JONSWAP谱Fig.21 JONSWAPspectrum
5.3 双体船阻尼确定
分析船舶的耐波性能时,阻尼的影响不可忽略。WAMIT软件基于势流理论开发,可以自行计算波浪的辐射阻尼,但是用户还需自行添加粘性阻尼矩阵。目前关于双体船粘性阻尼的资料并不完整,本文中双体船粘性阻尼估算方法参考单体船,并进行了适当的修正。
船舶六自由度中,横摇运动响应受阻尼影响最大。日本学者Ikeda等人[30]对横摇阻尼进行了深入的研究,并总结出了经验性的估算公式。将横摇阻尼分为5种:

其中:Bf为船体摩擦阻尼;Be为漩涡阻尼;BW为兴波阻尼;BL为升力阻尼;BBK为舭龙骨阻尼。
本文中的计算模型无航速,无舭龙骨,辐射阻尼由WAMIT自行算出,因此BL、BBK和BW均为0。对双体船水下单个片体的Bf和Be进行估算,随后进行修正,得到整个双体船的横摇阻尼。对于其余5个自由度的粘性阻尼,本文仅考虑了摩擦阻尼。摩擦阻尼按经验值取临界阻尼的5%,最终得到整个阻尼矩阵。
6 计算结果
6.1 船体运动RAO
通过WAMIT软件,可以求得六个自由度的RAO结果,将结果绘制成线图,如图22所示。
从RAO图可以看出,每个自由度的RAO规律不同,其中横摇是最值得关注的自由度,在不同的浪向角中,横浪(90°)无疑是最危险的工况,尤其是对横摇和垂荡运动。
6.2 JONSWAP谱下的响应谱
由于整个分析过程为线性分析过程,暂不考虑波浪非线性,因此可以通过线性谱分析的方法得到响应谱。由RAO结果得到的JONSWAP谱下的响应谱如图23所示。

图23 双体船6自由度JONSWAP响应谱图Fig.23 JONSWAPresponse spectrum of catamaran’s 6 DOFs motions
在JONSWAP谱下,每条响应谱的曲线都有一个明显的峰值,这与JONSWAP谱本身的谱峰频率有极大的关系。
6.3 Torsethaugen谱下的响应谱
由RAO结果,通过谱分析的方法也能得到Torsethaugen谱下的响应谱,各响应谱图如图24所示。
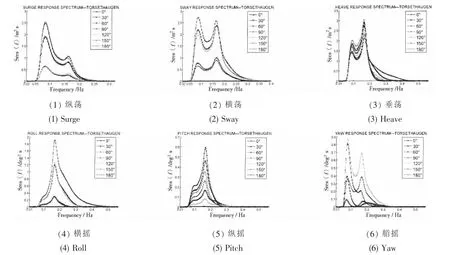
图24 双体船6自由度Torsethaugen响应谱图Fig.24 Torsethaugen response spectra of catamaran’s 6 DOFs motions
Torsethaugen谱下的响应谱与JONSWAP谱下的响应谱有很大的区别。前者响应值更大,并且由于双峰谱涌浪因素的作用,在低频的时候响应值明显变大,甚至出现比fp处更高的峰值。
6.4 最大运动响应估计
在窄带高斯过程假设下,通过响应谱可以估算短期随机波下运输船的最大运动响应。本文将海上维修登陆时间设为20分钟,分别估算了这两种海浪谱下的最大运动响应,结果如表8和表9所示。

表8 JONSWAP谱下双体船最大运动响应估计Tab.8 Extreme motion response of catamaran under JONSWAP wave spectrum

表9 Torsethaugen谱下双体船最大运动响应估计Tab.9 Extreme motion response of catamaran under Torsethaugen spectrum

续表9
对比两个谱下最大运动响应估计的结果,最大运动响应随浪向角的变化规律基本相同。需要特别关注浪向角为90°和180°时的运动响应。
从以上估算结果来看,双峰谱对运动响应的影响比较大。虽然希冀使用双体船模型,其耐波性优于单体船模型,但是从数据可以看出,横摇响应依然非常大(从JONSWAP谱的12.24°到Torsethaugen谱的11.31°)。在实际工程中,若要准确估算船舶的运动响应,十分有必要根据海上风电工作海域的实际海况选择合适的双峰谱或单峰谱来估算登陆船的运动响应,并非是单峰谱下的响应就一定大于双峰谱,但我们建议应选择较为保守的结果。
6.5 风机结构对双体船运动的影响
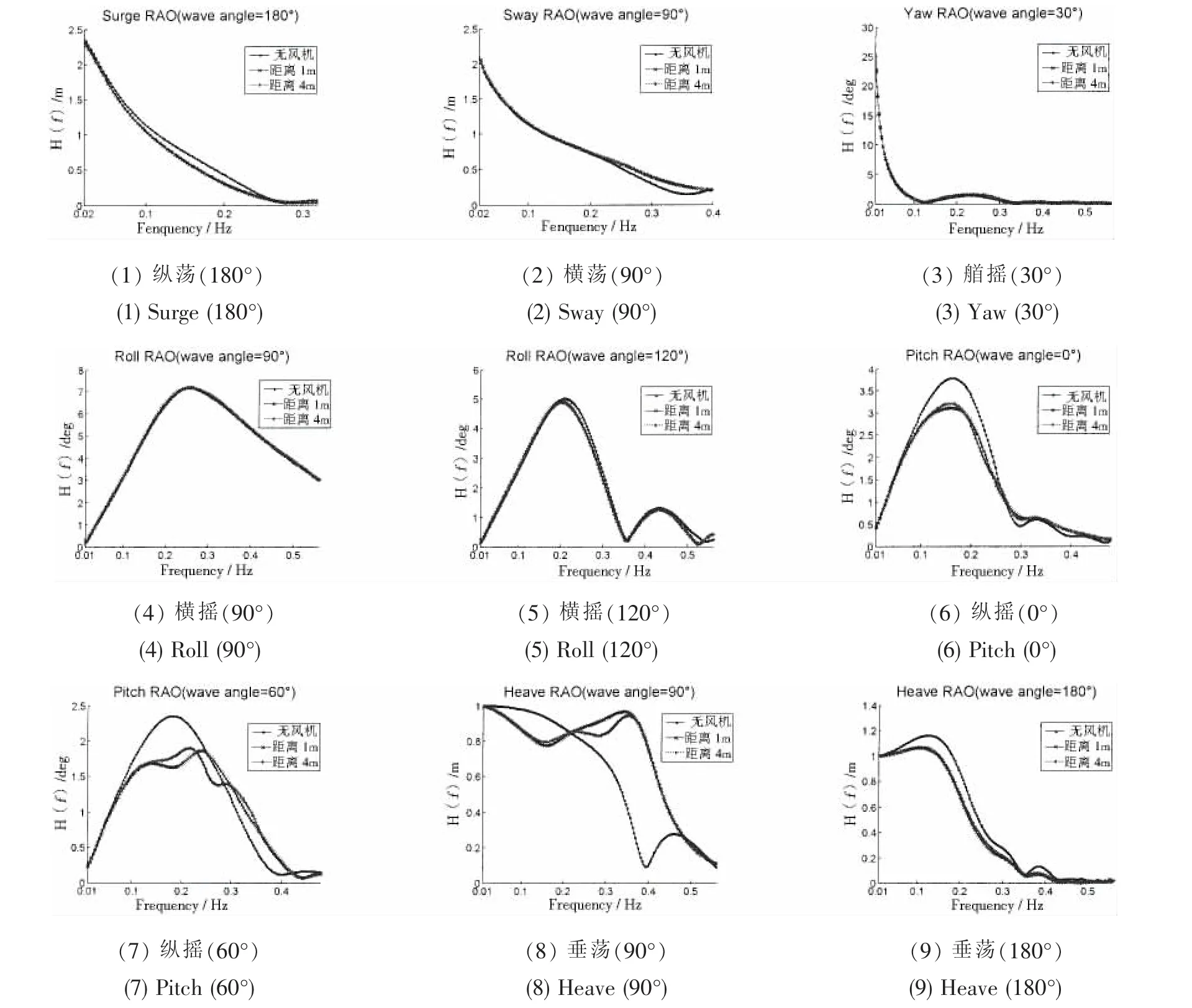
图25 双体船6自由度RAO对比图Fig.25 RAOcomparison of catamaran’s 6 DOFs motions
为了研究风机结构的存在以及双体船与风机之间的距离对于双体船运动的影响,本文还对船艏距风机表面4 m和无风机的情况分别进行了计算,并将结果与6.4节中船艏距风机表面1 m时的结果进行了对比。
风机的存在对双体船运动的影响很小,本文特意选择了各自由度中影响较大的浪向角来加以说明。对于纵荡、横荡和艏摇三个自由度,本文分别选择了浪向角为180°、90°和30°的结果进行对比。对于横摇运动,本文选择了浪向角为90°和120°的结果对比。对于纵摇运动,本文选择了浪向角为0°和60°的结果对比。对于垂荡运动,本文选择了浪向角为90°和180°的结果对比。结果如图25所示。
从以上结果可以看出,风机的存在对纵荡、横荡和艏摇运动的影响很小,双体船与风机之间的距离的影响几乎可忽略不计。风机对于横摇运动的影响也非常小。仅在浪向角为120°时,横摇运动略有差别。对于纵摇运动,无风机时,纵摇运动最大;登陆船与风机的距离对纵摇影响很小。对于垂荡运动,在无风机存在时,双体船的垂荡运动在低频的RAO要大于有风机时的RAO,在高频反而要小。然而在有风机时,双体船与风机之间的距离对垂荡影响却不大。因此,在实际工程中可忽略风机对登陆船运动的影响。
由于本文计算模型中双体船船宽8.8 m,风机直径5 m,和双体船与风机距离(1-4 m)均在同一个量级上,而双体船船头正对桩基础,因此风机在流场中的存在对垂荡和纵摇产生影响,而对运输船的其他自由度运动并没有产生大的影响。由此可得出结论,在研究海上风场人员登陆问题的时候,可以忽略运输船与风机之间的相对距离的影响。
7 结 论
当前世界上各种先进的人员传送系统多在欧洲海上风电场得以应用,有各自的优缺点和工作海况的限制,本文对其加以总结,为实际工程中选择合适传送系统和研发新型传送系统提供了有力的建议。海上风场的人员传送将直接影响其运营成本,我国正大力发展海上风电产业,但是对海上人员传送这一问题的研究还处于一片空白,因此十分有必要对这一问题展开全面而深入的研究,尤其是开发属于自己的海上人员传送系统。目前,影响人员登陆的主要因素就是波高,其次是波浪的周期组成特性。从本文的算例中看出,在风浪为主的海况下,单峰波谱下比双峰波谱下预报的横摇与纵摇结果要大,而垂荡较小。因此,需要充分考虑当地海域的真实波浪条件,采用适合的波谱来估算船舶的运动响应,提供传送系统设计时所需的精确的运动输入。多体水动力的计算分析还表明,需要考虑风机桩基础的存在,但双体船与风机之间的距离在若干米范围内时,此距离对双体船的耐波运动特性的改变几乎没有影响。
[1]GWEC.Global wind report 2014[R].2014.
[2]中国循环经济协会可再生能源专业委员会-2014中国风电发展报告[R].2014.
[3]邓院昌,王铁强.海上风电场建设的现状分析与经验教训[C].第十三届中国海洋(岸)工程学术讨论会论文集,2007.
[4]Ewen Morrison.Personnel transfer to offshore wind turbines[C].The 3rd Internation Conference on Marine Renewable Energy(MAREC 2004),2004:153-162.
[5]Van Bussel G JW,Bierbooms W.Analysis of different means of transport in the operation and maintenance strategy for the reference DOWECoffshore wind farm[C]//Proc OW EMES.Naples,2003.
[6]Hofmann M,Sperstad I B.Nowicob-a tool for reducing the maintenance costs of offshore wind farms[J].Energy Procedia,2013,35:177-186.
[7]Marsh G.Opportunities for composites in wind farm service vessels[J].Reinforced Plastics,2012,56(6):16-20.
[8]Offshore wind farm service and crew transfer[DB/OL].http://www.mobimar.com/workboats-offshore_wind_farm_service_and_crew_transfer.2014.
[9]Powerglide 46 wind farm crew catamaran[DB/OL].http://www.powerglide30.com/windfarm.html.2015.
[10]Welcome to ocean wind marine LTD[DB/OL].http://oceanwindmarineltd.com/.2009.
[11]New austal vessel to enhance wind farm support operations[DB/OL].http://www.austal.com.2012.
[12]Apollo Duck[DB/OL].http://commercial.apolloduck.com/listings.phtml?cid=617.2014.
[13]LHR marine.X-800 offshore personnel transfer net[DB/OL].https://www.lhrmarine.com.2016.
[14]Seaway heavy lifting[DB/OL].https://www.seawayheavylifting.com.cy/.2015.
[15]Reflexmarine.This is what we do[DB/OL].2015.
[16]Harbour trials of PTSin Hamburg[DB/OL].http://pts-offshore.com/en/aktuell.htm.2008.
[17]Mobimar.Offshore wind farm service and crew transfer[DB/OL].http://www.mobimar.com/workboats-offshore_wind_farm_service_and_crew_transfer.2015.
[18]Marinelink.New safer vessel transfer system[DB/OL].http://www.marinelink.com/news/transfer-vessel-system345464.aspx 2012.
[19]Sea Technology Group.MaXccess personnel-transfer platform completes sea trials[J].Sea Technology:Worldwide Information Leader for Marine Business,Science&Engineering,2012,53(4):79-79.
[20]自动化在线.远海的操作与维护:到达所有区域[DB/OL].http://www.autooo.net/classid109-id118509.html.2013.
[21]国际船舶网.Houlder海上通道系统获安全革新奖[DB/OL].http://www.cnss.com.cn/html/2013/cbpj_0328/97734.html.2013.
[22]World Maritime News.BMT nigel gee complete offshore trials for turbine access system(UK)[DB/OL].http://worldmaritimenews.com/archives/66336/houlder-bmt-nigel-gee-complete-offshore-trials-for-turbine-access-system-uk/.2012.
[23]Offshore WIND.Houlder’s TASon trial at thanet wind farm[DB/OL].http://www.offshorewind.biz/2014/06/30/houlders-tason-trial-at-thanet-wind-farm/offshoreWIND,2014.
[24]Ampelmann.Our products for safe offshore access[DB/OL].http://www.ampelmann.nl/products/.2016.
[25]Offshore WIND.Ampelmann opens news facility in Rotterdam harbor[DB/OL].https://www.offshorewind.biz/2014/10/09/ampelmann-opens-news-facility-in-rotterdam-harbor/offshoreWIND.2014.
[26]Momac.Momac Offshore Transfer System MOTS-G designed for DPvessels[R].Report.2013.
[27]Houlder.Offshore personnel transfer system[DB/OL].http://houlderltd.com/case-study/personnel-transfer-system/.2016.
[28]Momac.momac Offshore Access Systems MOTS[DB/OL].http://www.momac-robotics.de/momac-Offshore-Access-System-MOTS.html#sitemap momac.2012.
[29]Det Norske Veritas.Recommended practice det norske veritas[S].DNV-RP-C205,2010.
[30]Yuki Kawahara,Kazuya Maekawa,Yoshiho Ikeda.Characteristics of roll damping of various ship types and a simple prediction formula of roll damping on the basis of ikeda’s method[C].The 4th Asia-Pacific Workshop on Marine Hydrodymics-APHydro2008,2008.