复杂带状地形条件下的地面三维激光扫描点云数据采集与配准处理试验
2018-06-04袁希平
杨 敏,甘 淑,2,袁希平,2,高 莎,朱 赞,于 辉
(1. 昆明理工大学国土资源工程学院,云南 昆明 650093; 2. 云南省高校高原山地空间信息测绘技术应用工程研究中心,云南 昆明 650093)
三维激光扫描技术是顺应大数据时代而快速发展起来的一种新型数据采集手段。它通过高速激光扫描测量的方式,获取被测对象表面大量点的三维坐标、反射强度和纹理信息,这些点即称为点云[1]。目前三维激光扫描技术已广泛应用于地形图测绘、地质灾害监测、矿业工程和林业等各个领域[2-4]。随着三维激光扫描仪配套软硬件的不断丰富,不同的点云数据采集与数据匹配处理模式也受到了研究者的特别关注。
归纳目前的三维激光扫描数据采集模式大致分为以下4种,即:①基于一定重叠度的独立站点数据采集模式;②基于标靶的点云数据采集模式[5];③基于全站仪/GPS测站坐标控制的数据采集模式[6-7];④基于测站坐标控制的后视法数据采集模式[8-11]。后两种模式的数据采集是建立在不同测站之间的空间相互关系上,以便于实现点云数据的快速配准,因此也是近年来比较关注的数据采集模式。
点云数据配准处理是将同一测区的不同测站的扫描数据整合到统一的坐标系中,让不同测站的点云准确拼接,以实现测区地物表面点云信息的精确表达。目前,在点云数据配准处理过程中应用最广、最经典的配准方法有迭代邻近点算法(iterative closest point,ICP)[12]和一些改进的ICP算法[13-14]。这些点云数据配准处理方法多是以六参数配准为基础,通过查找相邻测站间重叠区域的最近点集,再通过设定最近点间的距离阈值以测算满足阈值的最近点间的旋转和变换矩阵,以实现点云的精确配准。
在实际应用中,随着不同采集模式的出现,点云配准的思路也得到扩展。具体可根据不同的数据采集模式,组合使用不同的方法进行点云配准,从而克服传统配准方法中因同名点位置误差而引起的误差传播及计算量大等问题。为此,本文拟从三维激光扫描仪的3种数据采集模式出发,对不同采集模式下的点云配准方法及精度进行组合试验分析研究,着重探讨与核实验证建立在不同测站之间的空间相互关系上的,结合了GPS定位功能和全站仪测站坐标测量功能的这两种数据采集方法,是否可以获得高精度的点云匹配数据。
1 试验方案
1.1 试验区选取
小江属金沙江下游的一级支流,其流域位于云南省东北部,由于小江深大断裂带作用,新构造运动强烈,特殊的地质环境条件致使小江流域泥石流沟谷发育,不稳定坡面增多、松散碎屑物丰富,崩塌、滑坡、泥石流等灾害频发,素有“流淌的山谷”之称。为了开展泥石流迹地的精准监测与模拟研究,本次研究选取了小江流域中具有典型泥石流冲沟特征的大白泥河沟为试验区。
试验区的大白泥河沟位于小江流域的中上游,其小流域面积18.1 km2,主沟长11.8 km,沟床纵比降10.66%,流域最高高程3100 m,沟口1300 m。时有季节性的泥石流发生,而且发生频率高、规模大,是引起小江该段河床严重淤积、河床变迁和边岸冲刷的主要原因。
1.2 试验条件概况
本研究使用MAPTEK I-Site8200型地面三维激光扫描仪进行数据采集,试验数据采用I-Site Studio软件进行处理分析。其中,MAPTEK I-Site8200型扫描仪的主要参数包括:最大测程500 m~750 m,最小测程1 m,测量精度±8 mm,角度测量范围水平方向0°~360°,竖直方向-45°~90°,扫描分辨率分4个等级,分别为2级、4级、6级、8级,仪器还带有内置GPS和数字罗盘。另外,辅助数据采集的站点控制测量仪器还包括中海达全站仪1台,普通棱镜1个,以及其他相关测量器件如记录板和卷尺等。
1.3 数据采集模式
为了对不同采集模式下获得的地面三维扫描点云进行配准处理与精度分析认识,分别组织开展了基于一定扫描重叠度的独立站点采集模式、基于站点GPS坐标控制的采集模式和基于全站仪站点坐标控制的后视法采集模式这3种试验方案进行数据采集与匹配技术处理试验。
2 不同模式下的点云数据采集试验
2.1 基于一定扫描重叠度的独立站点数据获取
根据三维激光扫描仪的特性和试验场地的实际情况,本次试验在场地内布设3个控制点(ground control points,GCP),控制点间的距离小于2倍的最大测程,以保证两测站有足够的重叠区。控制点布设示意图如图1所示。分别在GCP2、GCP3点上架设仪器,设置扫描分辨率为4级、角度范围等参数(下述两种模式的参数与该站相同)并进行扫描。
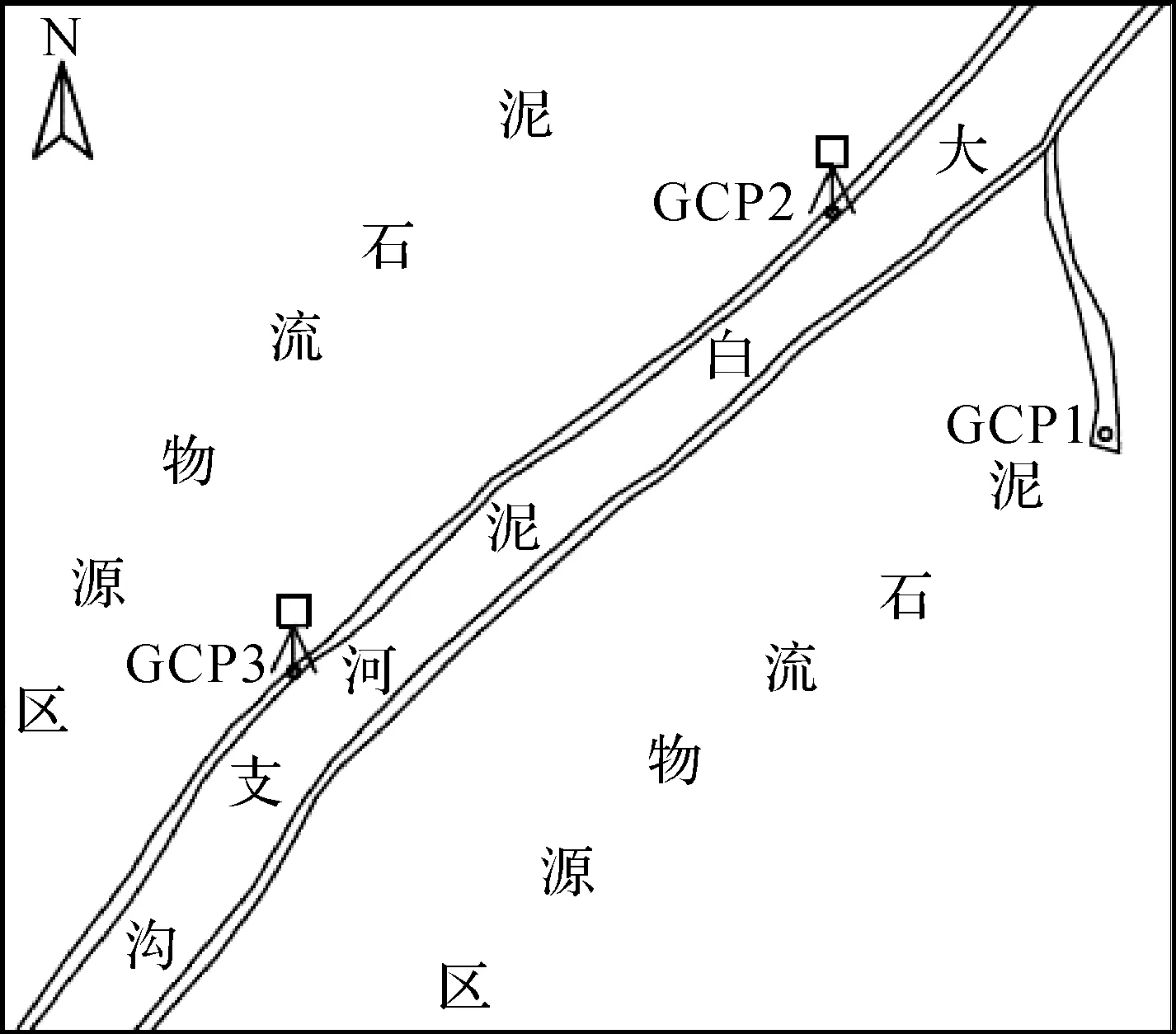
图1 控制点分布示意图
2.2 基于站点GPS坐标控制的扫描模式的数据获取
基于站点GPS坐标的扫描模式即在仪器扫描的过程中,基于扫描仪器内置的单点GPS接收装置,采用GPS定位技术测定测站点(GCP2、GCP3)的坐标位置(见表1),以此确定测站在全球坐标系统下的绝对位置。该位置就是测站坐标系的原点,但由于测站坐标系的方向不确定,因此需要通过扫描仪的数字罗盘来确定起始扫描方向X轴与磁北方向的方位角,并且Y轴与X轴在扫描面内垂直,Z轴与仪器扫描面垂直,基于以上坐标系的空间关联,从而扫描得到具有相应坐标的点云数据。表1列出了试验中的3个扫描仪测站点的GPS定位信息。

表1 扫描仪测站点的GPS定位信息
2.3 基于全站仪站点坐标的后视法扫描模式的数据获取
基于全站仪站点坐标的后视法扫描模式进行数据采集时,其实际操作需要分为两个步骤展开。第一步是利用全站仪测量获取测站点(GCP1、GCP2、GCP3)坐标。该处获得的测站点坐标是全站仪测量时确定的独立坐标系里的坐标值,坐标测量结果见表2。在实际工程应用中,若需要将点云坐标转入地方坐标系中,那么全站仪测坐标时需与当地坐标系中的已知点进行联测实现。第二步是进行地面三维激光扫描仪数据采集。首先是将三维激光扫描仪架设在GCP1上,进行精确对中和整平,在手簿上输入站点的全站仪测量坐标,后视选择扫描仪内置的罗盘进行定向,之后进行小范围扫描,在GCP1上进行扫描的目的是将该测站点的坐标录入扫描仪中;然后,从GCP2点开始,每一站以上一站作为后视点,并且输入测站点的全站仪测量坐标,这样测站点与后视点的连线方向即是坐标X轴。扫描分辨率和角度范围设置与前面基于站点GPS坐标的扫描模式的数据获取设置一致。

表2 基于全站仪测量的扫描仪测站点信息
3 不同模式下的点云数据匹配处理技术
3.1 基于一定扫描重叠度的独立站点模式的点云数据配准处理技术
根据三维激光仪器扫描原理可知,采用该模式获取的点云都是独立处于仪器架设时各自的测站坐标系中,若进行不同站点扫描点云的配准处理,就需要利用解析摄影测量的方法,即根据相邻测站间重叠区域内的同名点对,并且求解这些点对在不同坐标系之间的坐标转换关系[16],即旋转参数R和平移参数Q。
基于扫描重叠度的点云图像同名点对的坐标转换关系处理的数学模型为
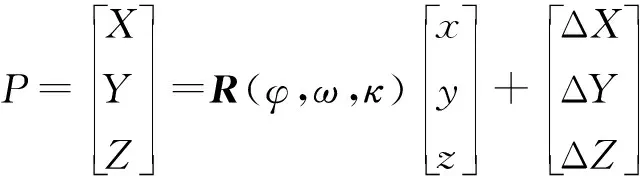
(1)
式中,(X,Y,Z)和(x,y,z)分别为两个不同站点的扫描坐标系下的同一个点P的坐标;R(φ,ω,κ)为两个坐标系的旋转矩阵;(ΔX,ΔY,ΔZ)为平移参数。通过对至少3对同名点对进行解算,计算6个参数值并代入所有的点云中便可实现点云的初配准。
试验分析该模式下的点云匹配处理效果,由于点云数据量巨大,一方面,配准过程所花费的时间较长。另外,由于三维激光扫描是等角度采样,不同站点下的数据获取时,客观上无法控制各站扫描激光点落在某个同名特征上的空间距离长短,因此不同站点扫描获得的“同名点”也并非是严格意义上的同名点,这必然影响该模式下对不同站点云匹配处理的精度效果。
3.2 基于站点GPS坐标扫描模式的点云数据配准处理技术
理论上在该扫描模式下进行的测区内不同站点获取的点云数据配准处理,由于各扫描站点获取的点云数据均已控制在统一的空间坐标体系下,因此点云数据配准处理的实质就是对不同站点的点云数据载入而实现自动拼接。在本试验中,3个测站的点云匹配处理技术是在数据采集时,主要根据数字罗盘测得的X轴与磁北方向的夹角,再结合测站点的坐标值,以及表面点的竖直角、水平角和距离,根据三维激光扫描仪坐标测算原理,直接测定点云的坐标值。理论上,该模式下点云匹配处理技术过程主要包括以下3个步骤:
(1) 将仪器内置GPS接收获取的测站点坐标转换为高斯平面直角坐标为
(2)
式中,x、y为WGS-84坐标系下的大地坐标(B,l)归算至高斯平面直角坐标系下的坐标;X为自赤道量起的子午线弧长;N为曲率半径;η为测站点上的垂线偏差在卯酉圈上的分量;t为纬度的正弦值,t=tanB,ρ=206 265。
(2) 根据X轴与磁北方向的夹角和点云与X轴的水平角测算点云的磁方位角。
(3) 根据磁方位角、竖直角和距离测定点云坐标。
总之,该模式下获取的不同站点的点云数据,其本身均处于相同的坐标系当中,即各站获取的点云数据,在仪器架设时的参数设置与扫描测量过程中,其实质就已经通过仪器内部软件完成了对点云数据的统一空间坐标配准处理。
3.3 基于全站仪站点坐标控制的后视法扫描模式的点云数据配准处理技术
该模式下获得的点云坐标都是将初始方向的方位角视为(0°00′00″)计算得来,因此该模式下的点云配准处理就是将点云坐标转换到全站仪确定的独立坐标系下的过程。实际上就是将试验区各站点导线测算的结果追加到点云坐标上。同理,该模式下获取的不同站点的点云数据,基于各站实施扫描前就已经对各站点进行控制测量而获取了测区各站点的统一坐标体系,因此各站获取的点云数据可以通过在仪器架设时的参数设置进行控制,其点云匹配实质是在扫描测量过程中就已经通过仪器内部软件完成了对点云数据统一空间坐标的配准处理。
本模式下的匹配处理技术主要是根据导线控制测量原理,对导线中相邻各站点的点云匹配处理方法如图2所示。具体各站点的点云坐标值的计算处理模型为
(3)
式中,x1、y1为测站点GCP1的坐标;x2、y2为测站点GCP2的坐标;x3、y3为测站点GCP3的坐标。
(4)
式中,αi为测站GCP2上第i个点的方位角;αj为测站GCP3上第j个点的方位角;βi为测站GCP2上第i个点的水平角;βj为测站GCP3上第j个点的水平角,其中,i=1,2,3,…,n,n为测站GCP2的点云总数,j=1,2,3,…,m,m为测站GCP3的点云总数。方位角的角值范围为0°~360°,如果计算结果大于360°,则减去360°;如果计算结果为负值,则需加360°。
(5)
式中,z2为测站点GCP2的高程;si为测站点至第i点的距离;θi为第i点的竖直角。同理计算测站GCP3上的点云坐标。
通过以上解算,点云被统一到与测站坐标相同的坐标系下,实现了点云的初配准,再运用ICP法进行全局配准。
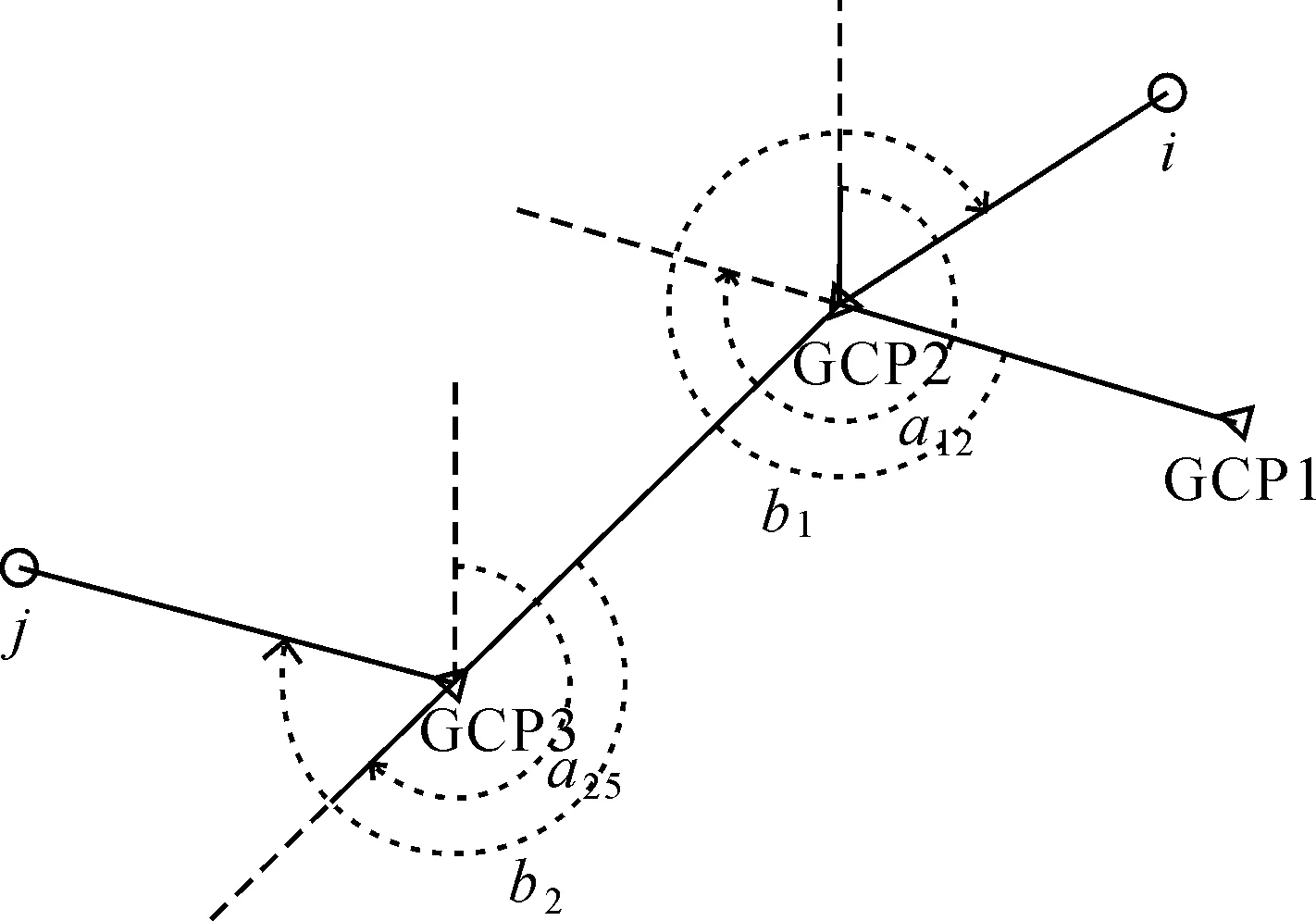
图2 基于全站仪测站坐标的扫描模式测量示意图
4 试验结果分析与讨论
利用软件实现对3种采集模式下获取的点云数据的相应配准处理,选取GCP2和GCP3两个站点之间的点云匹配结果如图3所示。其中,A为GCP2和GCP3两个站点上获取的点云匹配结果图,B为两个测站的扫描重叠区域的点云配准示意图,C为两个测站均能采集到的同一根电杆在点云配准后的相对位置图(邻近点的距离最大值为0.289 m,小于电杆的直径0.3 m),D为GCP2和GCP3两个站点的扫描区域遥感影像图。

图3 两个测站获取的点云配准结果示意图
查看其配准效果报告,整理得到配准精度见表3。即在本试验区泥石流冲沟中应用三维激光扫描技术进行地形数据采集,得出的试验数据点云匹配效果为:基于内置GPS站点坐标的扫描模式点云配准精度最高为0.003 m;其次是基于全站仪站点坐标的后视法扫描模式的点云配准精度为0.005 m;而基于一定重叠度的独立站点坐标扫描模式的点云配准精度稍差为0.010 m。
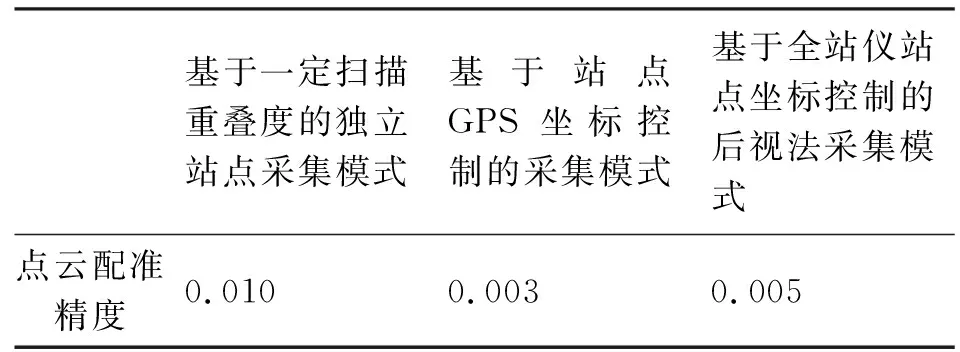
表3 点云配准精度 m
综合对比3种试验方案及结果,初步整理分析得出:
就不同模式的操作处理工作量进行比较:在数据采集试验中,就在每站点上进行扫描仪架设与扫描实施操作时间方面进行比较,基于一定扫描重叠度的独立站点扫描与基于站点GPS坐标扫描这两种扫描模式的野外作业时间相近,大约为20 min;但在数据匹配方面,由于前者的数据配准处理基于同名点对进行,为了保证配准精度,在同样范围的测区中,为了避免地物遮掩,该模式可能需要架设更多的测站以保证相邻测站之间的重叠度,因此会加大野外工作量。基于全站仪站点坐标的后视法扫描模式,由于其野外数据采集主要是利用了“全站仪+三维激光扫描仪”的结合操作,测区每站点测量都要进行两套测量,所耗费的时间必然也要多于上述两种模式。当然,如果测区内有已知的控制点,该采集模式可以有效地将点云直接测算至已有坐标系中,这对测区获得的点云数据的持续动态监测与应用也是很有利的。
仅就不同模式下点云匹配拼接处理进行比较:①对于基于一定扫描重叠度的独立站点模式的匹配处理,由于其点云匹配处理采取的策略是以其中某一个测站的仪器架设坐标作为整个测区的基准坐标系统,首先基于一定重叠度的同名点进行不同站点之间的坐标匹配处理较为耗工耗时;另外若需要对测区进行多个时段观测,那么每次观测值的坐标系都是独立的,很难实现在空间上进行关联分析。②基于站点GPS坐标控制的扫描模式的点云匹配拼接处理,在小范围内由于其数据配准时所进行的坐标转换对坐标值的影响不明显,处理效率较高,但是,当测区范围较大时,因“曲改值”带来的距离误差会很大;另外,由于该模式下的GPS单点定位的精度较低,当测站过多时,其误差传播带来的点位误差较大。③基于全站仪站点坐标的后视法扫描模式优势在于可以直接测得点云在现有坐标系下的坐标值,对地区的工程利用较为有利,并且可以对多站点云进行一次性拼接匹配处理,拼接效率较高。但其存在的匹配处理缺点在于全站仪的观测值误差会直接代入到点云的坐标值中,全站仪获得的测站坐标值的精度将直接影响着点云精度。
5 结 论
本文选取泥石流冲沟为试验区,采用3种数据采集模式获取研究区的点云数据进行配准处理,通过分析对比发现3种方法在测区内都有良好的拼接精度。对比分析也发现:①基于站点GPS坐标的扫描模式和基于全站仪站点坐标的后视法扫描模式,更有利于在本试验区这样的条带测区中进行应用,其点云数据采集和配准处理均具有明显的优势;②这两种模式可克服基于一定扫描重叠度的独立站点模式应用中全局坐标系转换困难的问题,以及配准处理时为找重叠区域同名点对数据采集要求苛刻的弊端,同时也避免了以往扫描测量中对标靶设置的困难与依赖。
为了进一步提高地面三维扫描点云数据采集效率、配准精度和后续使用率,初步提出应对以下两个方面进行深入研究:①将传统测量中导线测量的理念及平差原理更加切合地应用于三维激光扫描的数据采集,争取减少误差传播的同时,使点云数据与全局坐标系精确统一;②三维激光扫描技术应用于泥石流沟中时,还应对测站的布设做深入分析,尽量避免因地表特征相互遮掩而出现扫描盲区与点云空洞等问题。
参考文献:
[1] 施贵刚. 地面三维激光扫描数据处理技术及作业方法的研究[D]. 上海:同济大学, 2009.
[2] DENORA D, ROMANO L, CECARO G. Terrestrial Laser Scanning for the Montaguto Landslide (Southern Italy)[M].[S.l.]: Springer, 2013.
[3] WATT P J. Measuring Forest Structure with Terrestrial Laser Scanning[J]. International Journal of Remote Sensing, 2007,26(7):1437-1446.
[4] BUCKLEY S J, HOWELL J A, ENGE H D, et al. Terrestrial Laser Scanning in Geology: Data Acquisition, Processing and Accuracy Considerations[J]. Journal of the Geological Society, 2008,165(3):625-638.
[5] BARNEA S, FILIN S. Keypoint Based Autonomous Registra-tion of Terrestrial Laser Point-clouds[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2007,63(2008):19-35.
[6] DU J, TENG H. 3D Laser Scanning and GPS Technology for Landslide Earthwork Volume Estimation[J]. Automation in Construction, 2007,16(5):657-663.
[7] 浦石, 李京伟, 郭四清. 融合语义特征与GPS位置的地面激光点云拼接方法[J]. 测绘学报, 2014,43(5):545-550.
[8] 原玉磊, 蒋理兴, 张永旭, 等. 三维激光扫描仪定向技术研究[C]∥ 2009年全国测绘仪器综合学术年会. 宜昌:[s.n.], 2009.
[9] 贾东峰, 程效军, 刘燕萍, 等. 地面三维激光扫描仪定向法[J]. 工程勘察, 2014(10):60-65.
[10] 姚吉利, 马宁, 贾象阳, 等. 光束法区域网平差的地面激光扫描多站点云自动定向方法[J]. 测绘学报, 2014,43(7):711-716.
[11] 姚吉利, 马宁, 贾象阳, 等. 球形标靶的固定式扫描大点云自动定向方法[J]. 测绘学报, 2015,44(4):431-437.
[12] BESL P J, MCKAY N D. Method for Registration of 3-D Shapes[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1992,14(2):239-254.
[13] BERGEVIN R, SOUCY M, LAURENDEAU D. Towards a General Multi-view Registration Technique[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1996,18(5):540-547.
[14] BOUAZIZ S, TAGLIASACCHI A, PAULY M. Sparse Iterative Closest Point[J]. Computer Graphics Forum, 2013,32(5):113-123.
